Struggling with Marlin E0 & E1 work

Sairfan

Robert Harrison
Sairfan
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8b66aeb5-3d85-4650-aa32-3d1fce67e08en%40googlegroups.com.

ma...@makr.zone
Hi Sairfan,
you can't use Marlin in the Extruder mode. You must switch to true axis mode, i.e. use axes A B C instead of multiplexed "extruder" axes E0 E1 where you can only move one of them at a time and have to switch them between moves.
According to my information this should work with the newer Marlin versions. See this thread from about this comment, onwards:
https://github.com/openpnp/openpnp/issues/1240#issuecomment-893778594
It would be nice if one of the Marlin users, pehaps @KarampasEfthimios or @mariusmotea could provide samples or even document this on a OpenPnP Wiki page.
See also this, for background:
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOBNrKbrKHteE1pYwbnmpEuy0mzuqeGo_pKLJM33MTzMiyQjfA%40mail.gmail.com.
ma...@makr.zone
More background:
The 6axis support by DerAndere1 was merged:
Multi-axis-Marlin firmware was merged into upstream MarlinFirmware/Marlin bugfix-2.0.x on 5th June 2021, so support for up to 6 non-extruder axes will be part of an upcoming release of official MarlinFirmware/Marlin. Code from this repository (DerAndere1/Marlin) may contain additional multi axis feautures, but official Marlin will be more up to date in general and contain less bugs. Use nightly builds of official MarlinFirmware/Marlin, Version "Marlin 2.0 with bug fixes (bugfix-2.0.x)", whenever possible.
https://github.com/DerAndere1/Marlin/wiki
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/855397de-07d3-44cf-cafb-7e4db056d52d%40makr.zone.
Sairfan
ma...@makr.zone
Hi all Marlin users,
HELP WANTED:
I've made some minimal changes, but please somebody help with
improving the Wiki there (it is open to be edited!):
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#marlin-20
Please update the text to give confirmed guidance which version
of Marlin works for which controller / for how many axes. Ideally
add detailed instructions for how to configure on a separate Marlin
Configuration page.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/22a2f75b-f85f-48af-bfdb-27283fda5dfdn%40googlegroups.com.

165718275
ma...@makr.zone
> First send T0 or T1 so that the firmware can recognize
> I suggest you, read the Wiki again carefully
Like I said: don't use E0 E1, use the A B C axes etc.
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#marlin-20
More generally:
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#key-features
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/tencent_8E8DD3377B2E4A6E5C291B70D498047C0808%40qq.com.
Sairfan
I downloaded branch and tried to compile after setting 6-Axes but it throws errors, I tried to fix it by setting different define macros based on error log but could not, can someone share suitable configurations to setup Marlin with 6 Axes for OpenPNP

Christian...@gmx.at
Christian...@gmx.at

pal...@gmail.com
Christian...@gmx.at
Christian...@gmx.at
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\HAL_SPI.cpp:25:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\MarlinSerial.cpp:21:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\HAL_SPI.cpp:25:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\Servo.cpp:25:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\MarlinSPI.h:24,
from Marlin\src\HAL\STM32\MarlinSPI.cpp:24:
Marlin\src\HAL\STM32\HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\Sd2Card_sdio_stm32duino.cpp:24:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\eeprom_flash.cpp:25:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\MarlinSerial.cpp:21:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
In file included from Marlin\src\HAL\STM32\HAL.cpp:25:
Marlin\src\HAL\STM32\HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\Servo.cpp:25:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\eeprom_flash.cpp:25:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\Sd2Card_sdio_stm32duino.cpp:24:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\HAL.cpp:28:
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1976:6: error: #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
1976 | #error "TEMP_SENSOR_1 is required with 2 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1984:8: error: #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
1984 | #error "TEMP_SENSOR_2 is required with 3 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:1992:10: error: #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
1992 | #error "TEMP_SENSOR_3 is required with 4 or more HOTENDS."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\HAL_SPI.cpp.o] Error 1
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\MarlinSPI.cpp.o] Error 1
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\MarlinSerial.cpp.o] Error 1
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\eeprom_flash.cpp.o] Error 1
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\Servo.cpp.o] Error 1
In file included from Marlin\src\HAL\STM32\../../inc/../HAL/HAL.h:30,
from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:31,
from Marlin\src\HAL\STM32\eeprom_sdcard.cpp:28:
Marlin\src\HAL\STM32\../../inc/../HAL/./STM32/HAL.h:58:4: error: #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports
58 | #error "SERIAL_PORT must be from 1 to 6. You can also use -1 if the board supports Native USB."
| ^~~~~
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
Marlin\src\HAL\STM32\../../inc/SanityCheck.h:572:26: error: static assertion failed: AXIS_RELATIVE_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\Sd2Card_sdio_stm32duino.cpp.o] Error 1
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\HAL.cpp.o] Error 1
In file included from Marlin\src\HAL\STM32\../../inc/MarlinConfig.h:49,
from Marlin\src\HAL\STM32\eeprom_sdcard.cpp:28:
E_MODES must contain X Y Z I J K M O E elements.
572 | static_assert(COUNT(sbm) == LOGICAL_AXES, "AXIS_RELATIVE_MODES must contain " _LOGICAL_AXES_STR "elements.");
compilation terminated due to -fmax-errors=5.
*** [.pio\build\BIGTREE_OCTOPUS_V1_0\src\src\HAL\STM32\eeprom_sdcard.cpp.o] Error 1
=============================================================================================================================================== [FAILED] Took 23.05 seconds ===============================================================================================================================================
Environment Status Duration
-------------------- -------- ------------
BIGTREE_OCTOPUS_V1_0 FAILED 00:00:23.047
========================================================================================================================================== 1 failed, 0 succeeded in 00:00:23.047 ==========================================================================================================================================
PS G:\PRIVAT\Bestückungsautomat\Marlin\Marlin-9axis_pull> echo "done" >C:\Users\CHRIST~1\AppData\Local\Temp\ipc
PS G:\PRIVAT\Bestückungsautomat\Marlin\Marlin-9axis_pull>
Sairfan

Marino
Christian...@gmx.at
Thank you very much for your offer.
but i think it's not that easy.
I've tested every version of Marlin I could find.
As long as I have this line
// # define LINEAR_AXES n
commented out I can compile it. But that way, marlin is not useful for me.
As soon as I remove the comment lines I am overwhelmed with error messages and I have no idea how to fix them for any of these errors.
Sergi wrote:
>> You can use my Malin with 9 axis repo or the merged of DerAndere1 and simply select the HAL of BTT Octopus.
>> I use the BTT GTR1.0 + M5 boards.
Everywhere it is proudly written how many axes which version masters, but it looks like the programming is far from mature so that these additional linear axes also work for the BTT Octopus. It looks like I'll have to rewrite every single file in this bloated firmware.
Sairfan
Sairfan

Leoyu
Marino
Christian...@gmx.at
Marino
Christian...@gmx.at
Marino
Christian...@gmx.at
But I have two other problems and I just can't find the solution.
1.)
How can I change the order of the axis feedback (M114)? OpenPnP needs a different order than reported by the Octopus Board.
2.)
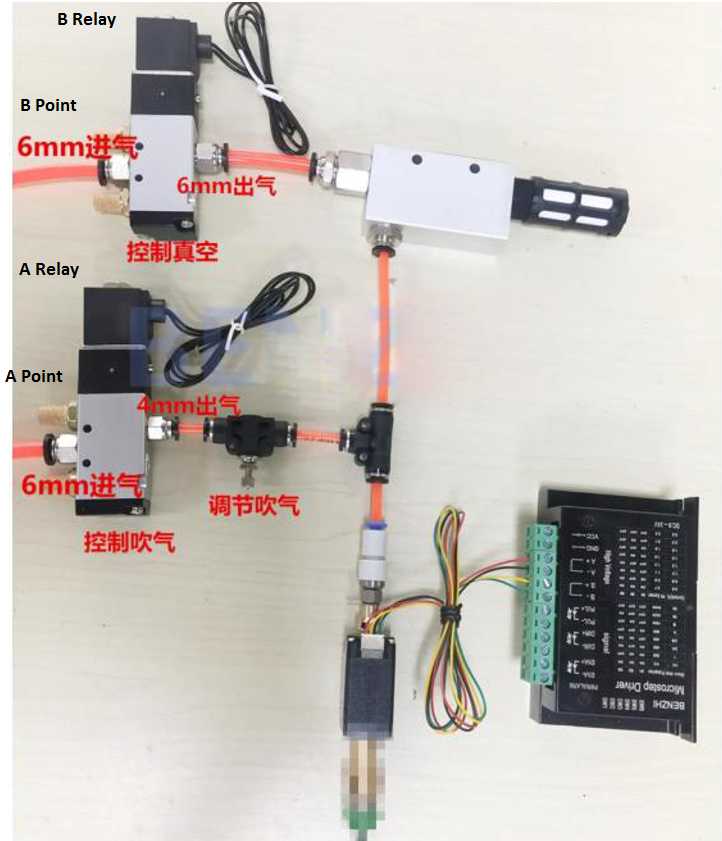
My rotary axes for the 4 nozzles are connected to B, C, U, V (internally called J, K, M, O). Although the current, steps/unit and microsteps settings in Config.h and Config_adv.h are set the same for the 4 axes, axes J and K rotate twice as fast and far as the other two.
The corresponding driver settings (TMC (X)) in Config_adv.h are highlighted. So they should be adopted. Still it doesn't work.
Did I miss some setting?
mark maker
1) you need to set the POSITION_REPORT_REGEX manually, in the right order.
https://github.com/openpnp/openpnp/wiki/GcodeDriver#position_report_regex
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9719c7e3-1374-4316-8d34-5e89ef367739n%40googlegroups.com.
Christian...@gmx.at
But there is another thing. Marlin also reports an additional E0 position although I don't use an axis with that name.
mark maker
The E axes are "extruder" axes, these are not well suited for
OpenPnP, because you need to multiplex them, i.e. you can only
ever move one axis at a time.
But I believe Marlin can be put in proper 6- up to 9-axis mode,
when using the right settings, and/or the right firmware fork:
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#marlin-20
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/51326de2-8c9f-4ddb-8f93-e0a72b5bbefbn%40googlegroups.com.
Marino
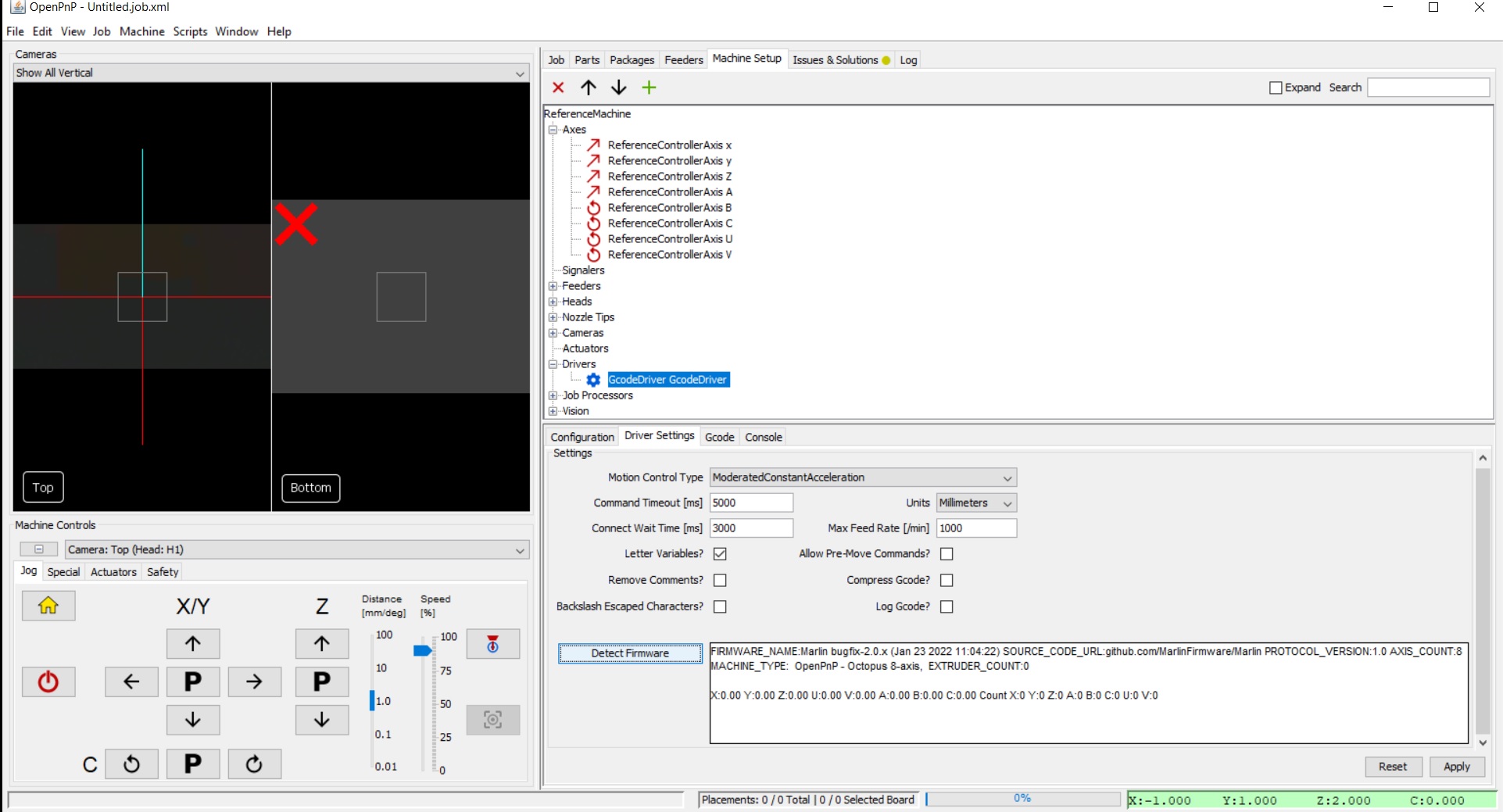
I have now completely removed the extruder axes so that only the position of the 8 axes X, Y, Z, I, J, K, M, O are reported.
You can find the current version here again: https://github.com/ARTofNOVELTY/Marlin_Octopus_8axis
I made some other adjustments that should get your pivots for the 4 nozzles working properly. If not, check the microstepping settings.
Christian...@gmx.at
thank you very much for your help.
Yesterday I found time to test the new version, but unfortunately it doesn't work.
I am unable to configure the same axes as before.
Octopus does not react to the settings in the Microstep section from config_adv.h - TMC(X)
I tested outside of OpenPnP to make sure it's a Marlin issue
I sent the command "G0 B100 C100 U100 V100" from Pronterface.
B and C axis are still faster and rotate farther than the other two. But I think now it's not twice as fast, just a third.
But when I sent the command M114, position of E0 has also been reportet. Now Marino modified this and there is no E Axes postion reported anymore.
So there is one more question to the order of the Position_Report_Regex.
Is it possible to change this order in OpenPnP? Or where can I change this pattern in marlin?
mark maker
Note this is due to a simplification in OpenPnP, that I hoped holds true. Now that its seems it doesn't, I need to forget that simplification, i.e. I must make the automatic regex generator smarter to work with any reported order. That'll take some thinking.
Until then you need to hand-change it, as you did.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/1708d810-c7d5-4b22-95ba-ed87983b65aan%40googlegroups.com.
Marino
Marino
Marino
mark maker
Marino> Furthermore, I could also change Marlin so that the driver reports in the expected X Y Z U V A B C pattern.
Marino> Try this version
Does this mean, I don't need to change OpenPnP? Will you make a
PR upstreams? Or is this a special version anyway?
Please document in the Wiki, thanks!
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#marlin-20
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c2232124-0e4f-46db-9065-c059af75613en%40googlegroups.com.
Marino
I'm still developing the CoreXY drive for my PnP machine and I'm still a long way from testing it with a finished drive, so Christian should first test whether everything harmonizes with OpenPnP.
If everything works, this version is welcome to be published and then it can be documented in the Wiki.
So far I've adapted the Marlin Version from https://github.com/paloky/Marlin_9axis_OpenPnP for Bigtreetech Octopus v1.1 / OpenPnp operation with 8 Axis, the extruders have been completely removed and the position of the 8 Axis is reported in the expected format" X , Y, Z, U, V, A, B, C".
Christian...@gmx.at
The Marlin version of Marino harmonises wonderfully with OpenPnp, except for a few minor things.
But before I do any more testing, I really need to take a few safety precautions.
When merging the last version of Marlin I accidentally added an extra zero to the steps per unit settings of X-Axis ...800 instead of 80 ... VERY STUPID - I KNOW :(
The machine is now working again, but the head needs to be recalibrated from scratch.
mark maker
> During the test runs, make sure that the X and Y axes only move when all 4 Z limit switches are active.
You can make sure of that in OpenPnP:
https://github.com/openpnp/openpnp/wiki/Axis-Interlock-Actuator
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/1c75d34b-1fc7-48f4-ae10-926290b235fen%40googlegroups.com.
Christian...@gmx.at
Marino
Christian...@gmx.at
Christian...@gmx.at
I will try to implement these safety precautions at the next opportunity.
Mark and Marino, if there are any special features you want me to test, just tell me, I'll try my best.
Marino
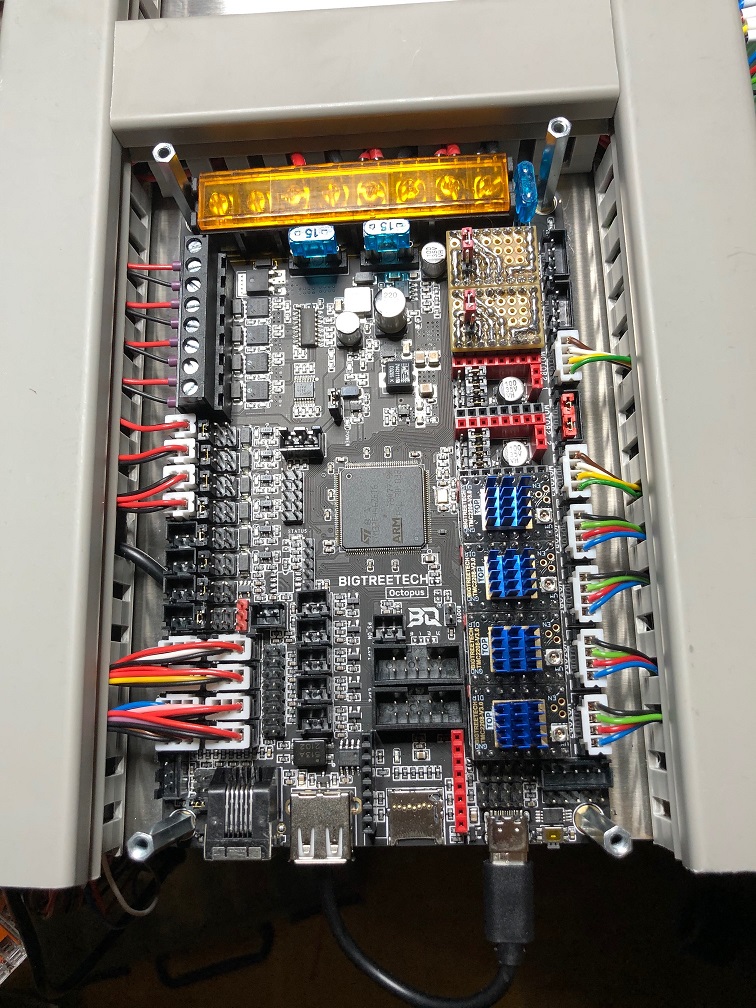
Or where can I get an exact circuit diagram of the BTT Octopus that shows the assignment of the stepper driver plug-in boards?
Christian...@gmx.at
here is what you need.
For the dummy boards i have made no schematic.
I just routed the signals step, direction, enable and GND or VCC_IO (selected with the jumper) to the Motor plug.
To prevent crossovers i decided to do this in the following order:
Enable --> B1
Step --> B2
Dir --> A2
Christian...@gmx.at
I think I've found the reason why two of my nozzles spin exactly twice as far and twice as fast as they should.
I swapped the motor drivers (TMC2208) and lo and behold, now it's the other nozzles that turn too fast and too far.
The TMC2208 are UART-capable drivers. So I guess they're not all configured the same.
Christian...@gmx.at
I am unable to solve this problem.
I know the reason it's not spinning properly, but I don't know how to solve it.
Is there any special configuration in Marlin that I need to do.
The TMC2208 is not getting the correct microstepping and current settings causing the steppers to spin incorrectly.
Normally the TMC2208 gets this information via UART. but I don't know why the octopus board doesn't communicate with them.
The jumpers are now set correctly, but that didn't solve my problem either.

Jon Raymond
Christian...@gmx.at
That was the solution!!
Thank you for your help!!
:-D Now I can finally set up all 4 nozzles.
Jon Raymond

Sudesh .s
Hi all Marlin users,
HELP WANTED:
I've made some minimal changes, but please somebody help with improving the Wiki there (it is open to be edited!):
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares#marlin-20
Please update the text to give confirmed guidance which version of Marlin works for which controller / for how many axes. Ideally add detailed instructions for how to configure on a separate Marlin Configuration page.
_Mark
Am 03.09.2021 um 17:34 schrieb Sairfan:
I tried the link https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares its configured for Teensy when i change it to Arduino Duo it does not work and throws a bunch of errors
On Friday, September 3, 2021 at 1:25:08 AM UTC-6 ma...@makr.zone wrote:
More background:
The 6axis support by DerAndere1 was merged:
Multi-axis-Marlin firmware was merged into upstream MarlinFirmware/Marlin bugfix-2.0.x on 5th June 2021, so support for up to 6 non-extruder axes will be part of an upcoming release of official MarlinFirmware/Marlin. Code from this repository (DerAndere1/Marlin) may contain additional multi axis feautures, but official Marlin will be more up to date in general and contain less bugs. Use nightly builds of official MarlinFirmware/Marlin, Version "Marlin 2.0 with bug fixes (bugfix-2.0.x)", whenever possible.
https://github.com/DerAndere1/Marlin/wiki
_Mark
Am 03.09.2021 um 09:04 schrieb ma...@makr.zone:
Hi Sairfan,
you can't use Marlin in the Extruder mode. You must switch to true axis mode, i.e. use axes A B C instead of multiplexed "extruder" axes E0 E1 where you can only move one of them at a time and have to switch them between moves.
According to my information this should work with the newer Marlin versions. See this thread from about this comment, onwards:
https://github.com/openpnp/openpnp/issues/1240#issuecomment-893778594
It would be nice if one of the Marlin users, pehaps @KarampasEfthimios or @mariusmotea could provide samples or even document this on a OpenPnP Wiki page.
See also this, for background:
https://github.com/openpnp/openpnp/wiki/Motion-Controller-Firmwares
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/855397de-07d3-44cf-cafb-7e4db056d52d%40makr.zone.
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/22a2f75b-f85f-48af-bfdb-27283fda5dfdn%40googlegroups.com.