Woodgrain texture blamed on dual gear extruder?
100 views
Skip to first unread message

Ryan Carlyle
Aug 5, 2021, 4:59:17 PM8/5/21
to 3DP Ideas
https://www.youtube.com/watch?v=32dTLRNIYmw
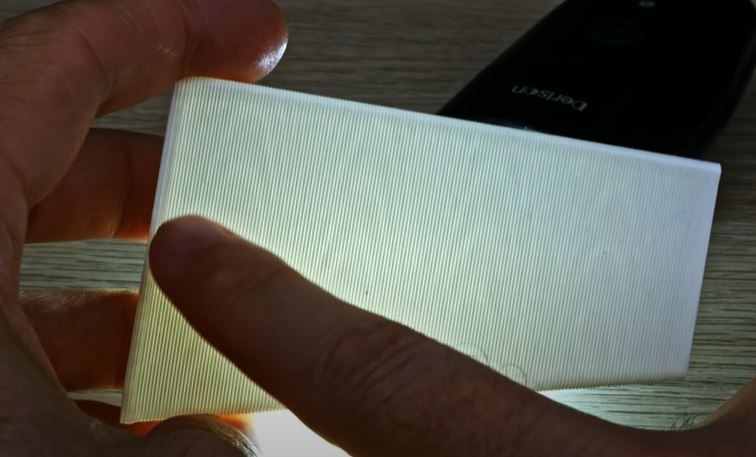
This is a new one for me. Flow pulsing from the extruder happening at a frequency that corresponds to the gear tooth pitch of the sync gear teeth in a dual-hob setup.

Whosawhatsis
Aug 5, 2021, 6:11:36 PM8/5/21
to 3DP Ideas, Ryan Carlyle
I saw this too. I can think of a couple of ways that this COULD be caused by the dual-drive extruder, but their testing methodology also didn't seem terribly rigorous, and there are some other tests that I would want to perform.
On Aug 5, 2021, 13:59 -0700, Ryan Carlyle <temp...@gmail.com>, wrote:
https://www.youtube.com/watch?v=32dTLRNIYmw
This is a new one for me. Flow pulsing from the extruder happening at a frequency that corresponds to the gear tooth pitch of the sync gear teeth in a dual-hob setup.
<Capture.JPG>--
You received this message because you are subscribed to the Google Groups "3DP Ideas" group.
To unsubscribe from this group and stop receiving emails from it, send an email to 3dp-ideas+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/f68f94fb-3386-4661-8cc6-7f28ce0c2002n%40googlegroups.com.
Ryan Carlyle
Aug 6, 2021, 10:39:16 AM8/6/21
to 3DP Ideas
Spur gears that are cut properly and aligned with the pitch diameters overlapping just don't have rotation rate variation. That's literally the defining feature of the spur gear tooth shape. So I'm wondering if these are mis-hobbed teeth or incorrect shaft distance. That's the sort of thing you would expect with cheap knockoffs of Bondtech parts. I'd like to see some testing of high-end dual-hob setups versus knockoff dual-hob setups.
I always wondered if widely spaced hob teeth (low tooth count / small effective diameter) like the Tatsu v2 would cause tooth-pitch-periodic flow variation. (I suspect WW will immediately jump in saying "the Tatsu we used at Deezmaker has wide tooth spacing and doesn't pulsate")
Ryan Carlyle
Aug 6, 2021, 11:35:01 AM8/6/21
to 3DP Ideas
Makes me think the spring-arm on a dual gear printer could use a ball-joint and two springs (one for bite and one for gears) rather than a hinge pivot and single spring. So the gear teeth are always positively engaged at minimum spacing even when the filament is larger. Although that will EVENTUALLY cause tooth wear that could reintroduce the problem.
All the diagnostic test print work with slightly varying extrusion volume per layer reminds me of the anti-ringing technique of varying accel on successive layers so the ringing flaws don't line up. Surface noise is less visible than aligned flaws. You could put small variations in layer height into the print to shift extruder-pulsation flaws into noise rather than moire patterns. That would also help delta salmon-skin effect.
Whosawhatsis
Aug 6, 2021, 4:01:49 PM8/6/21
to 3DP Ideas, Ryan Carlyle
My understanding is that Prusa is buying their gears from bondtech, so there shouldn't be any gear profile issues that first party bondtech extruders don't have. I think you're right about the spacing thing, though. I can even imagine that as the gears turn, there's a point in the transition of each gear tooth where the gear does more to push the gears apart than to advance the second drive gear, which could cause exactly this type of effect.
Walter Hsaio did a series of dual-gear extruder designs, at least one of which used a small shaft, with a separate (knurled) filament drive gear and synchronization spur gear for each. These used the spur gear contact as the pivot, to ensure that the gears always had proper contact (though the angled contact couldn't be good for tooth wear). The knurled gear for filament drive should be maintenance-free, since knurl drives shed any ground plastic much better than hobbed gears, and using them in a dual-drive configuration MIGHT solve the speed-variable steps/mm issue that knurl drives usually have, especially if they're not spring-mounted. https://www.thingiverse.com/thing:2890048
The earliest dual-drive extruder I saw (I believe it was designed by Aaron Double, who has since pulled all of his old designs from thingiverse) used four gears, two of which were mounted above the ones that actually drove the filament, and were there just to transmit force while allowing the distance between the drive gears to vary. You have to be careful when designing a system like that though, because it's easy for the pivot to introduce a little relative spin to the secondary gear. This is only a problem if the spring tension changes rapidly of course, and if it's doing that, you've got bigger problems than the relative phase of your two drive gears changing.
I did a bunch of testing for this type of noise when we switched to the tatsu 2 design, but couldn't detect any at the time. Of course, if you're using a bowden extruder (which the Bukito did, but the Bukobot did not), the bowden tube is going to be more than enough to damp this type of low-amplitude, high-frequency oscillation.
Another solution I can imagine would be to use a gear with a flexure core that constrains it in rotation while allowing the center to be a little eccentric. I think I've seen wade-style drive gears made this way, but it would be hard to miniaturize to this scale. There are other types of couplers, like an oldham coupler, that could be placed between the two drive gears to fix this, which could probably be made smaller, even if they would have more parts. Actually, any of the solutions that we use for Z-wobble decoupling could probably be adapted to solving this problem (though some are obviously better ideas than others).
Walter Hsaio did a series of dual-gear extruder designs, at least one of which used a small shaft, with a separate (knurled) filament drive gear and synchronization spur gear for each. These used the spur gear contact as the pivot, to ensure that the gears always had proper contact (though the angled contact couldn't be good for tooth wear). The knurled gear for filament drive should be maintenance-free, since knurl drives shed any ground plastic much better than hobbed gears, and using them in a dual-drive configuration MIGHT solve the speed-variable steps/mm issue that knurl drives usually have, especially if they're not spring-mounted. https://www.thingiverse.com/thing:2890048
The earliest dual-drive extruder I saw (I believe it was designed by Aaron Double, who has since pulled all of his old designs from thingiverse) used four gears, two of which were mounted above the ones that actually drove the filament, and were there just to transmit force while allowing the distance between the drive gears to vary. You have to be careful when designing a system like that though, because it's easy for the pivot to introduce a little relative spin to the secondary gear. This is only a problem if the spring tension changes rapidly of course, and if it's doing that, you've got bigger problems than the relative phase of your two drive gears changing.
I did a bunch of testing for this type of noise when we switched to the tatsu 2 design, but couldn't detect any at the time. Of course, if you're using a bowden extruder (which the Bukito did, but the Bukobot did not), the bowden tube is going to be more than enough to damp this type of low-amplitude, high-frequency oscillation.
Another solution I can imagine would be to use a gear with a flexure core that constrains it in rotation while allowing the center to be a little eccentric. I think I've seen wade-style drive gears made this way, but it would be hard to miniaturize to this scale. There are other types of couplers, like an oldham coupler, that could be placed between the two drive gears to fix this, which could probably be made smaller, even if they would have more parts. Actually, any of the solutions that we use for Z-wobble decoupling could probably be adapted to solving this problem (though some are obviously better ideas than others).
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/e34805b1-c680-4527-82dc-93cb889f52bdn%40googlegroups.com.
Whosawhatsis
Aug 6, 2021, 6:06:05 PM8/6/21
to 3DP Ideas, Ryan Carlyle
Oh, another thing I've been experimenting with recently, which should completely hide effects like this along with making the layer lines hard to see, is using Cura's fuzzy skin feature (which is also supposed to be in the next version of Prusaslicer) with the settings turned way down, so that the features it creates are on a similar scale to the layer lines. I've done some test prints with this that make the side surface texture of a print almost indistinguishable from the bottom surface texture when printed on a textured PEI sheet. It's a really nice effect for overly-glossy filaments like black PETG.
The surface texture does affect tolerances, but it does so in a way that is easy to compensate for with horizontal size compensation, and it's also possible (in Cura's implementation, anyway) to disable both the texture and the compensation for holes, though I'm thinking that the properly-compensated texture might actually be better for things like press-fits, since it will be easier to wear down the high points, effectively letting the press fit work as expected over a wider tolerance range.
The surface texture does affect tolerances, but it does so in a way that is easy to compensate for with horizontal size compensation, and it's also possible (in Cura's implementation, anyway) to disable both the texture and the compensation for holes, though I'm thinking that the properly-compensated texture might actually be better for things like press-fits, since it will be easier to wear down the high points, effectively letting the press fit work as expected over a wider tolerance range.
Ryan Carlyle
Aug 9, 2021, 10:18:36 AM8/9/21
to 3DP Ideas
Walter's tilted double knurl drive is interesting. Intellectually, it bugs me to have the tilted gear meshing and knurl bite, but I don't know if it'll actually cause problems or not.
.PNG?part=0.2&view=1)

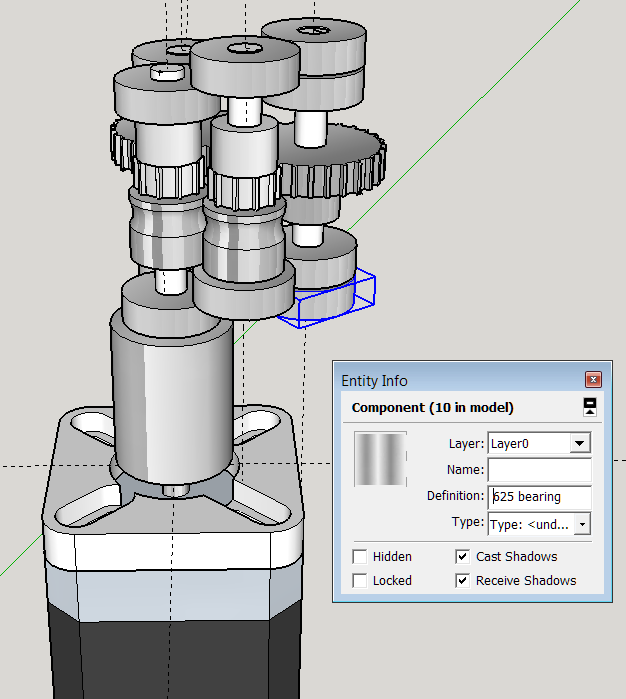
Somewhere floating around my office I have a prototype of a dual-hob extruder... where is that thing... https://groups.google.com/g/3dp-ideas/c/UJTU75rBymI/m/0Pyq8nhvDQAJ
Why did I stop working on that one? Did I not have any bowden printers in 2015 yet? Or did I just get too lazy to finish building out the filament inlet/outlet parts? Don't remember.
Some historical threads that came up while I was searching for the photos:
https://groups.google.com/g/3dp-ideas/c/rRs9ZKO1vDk/m/HW7fYx-XBwAJ dual motor drives
Whosawhatsis
Aug 9, 2021, 6:39:56 PM8/9/21
to 3DP Ideas, Ryan Carlyle
I recall that Aaron Double's design used four identical gears, but otherwise worked similarly to that one. It was also more compact (didn't have the shaft coupler, the first gear(s) were mounted directly to the motor. I don't recall what types of bearings it used but it looks like your larger gears are mostly there to provide clearance for them. Perhaps other gears could use a smaller shaft diameter, which would allow them to use smaller bearings. You could also save some horizontal space by putting the bearings on different planes, but that would, of course, add vertical space. Speaking of vertical space, it looks like the only reason for the shaft coupler is to allow it to be used both with geared and un-geared motors, is that correct? You would also need enough space, with a design like this one, to have two gears (a spur gear and a filament gear) on the same shaft.
Is there any particular reason, if you're using a couple of extra gears, that the one inline with the motor shaft should be one of the ones with a filament drive gear attached? Seems like it might make more sense to have a single spur gear on the motor shaft, with an identical gear next to it counter-rotating, then a spur/filament combination gear hanging off of each of those. Maybe this is an opportunity to add in a stage of gear reduction as well.
Another way to do it might be to put a spur gear on the motor driving a spur/filament combination gear (with a direction reversal, because spur gears) and use a short loop of timing belt with a tensioner to drive the second gear from a pulley that is also mounted to the motor shaft (with no direction reversal, because timing belt).
Of course, creality machines have been using standard spur gears for driving filament for years, and it seems to be working better than one would expect (even with brass gears). The trick is that they use grooved idlers to hold the filament in place, rather than a grooved drive gear (though the rims of the grooved idler do run against the softer brass drive gear in an undesirable way when filament isn't present, or when it gets too thin), and I think this has a lot of advantages, both for making machining/assembly tolerances less critical in general and specifically for getting rid of the problem where a filament that is pushed toward one edge of the grooved drive gear sees a greater effective diameter on that gear. Particularly tight grooves can even result in different parts of the filament seeing different effective gear diameters, contributing to filament stripping. Of course, a dual-drive setup wouldn't have an opposing idler to have a groove in it, so you'd need to rely on other parts to constrain the filament in the direction parallel to the rotational axes of the gears. OTOH, not having the filament sitting in a groove would allow to to get more stationary extruder body structure closer to the grip point of the filament without impinging on the gears.
Is there any particular reason, if you're using a couple of extra gears, that the one inline with the motor shaft should be one of the ones with a filament drive gear attached? Seems like it might make more sense to have a single spur gear on the motor shaft, with an identical gear next to it counter-rotating, then a spur/filament combination gear hanging off of each of those. Maybe this is an opportunity to add in a stage of gear reduction as well.
Another way to do it might be to put a spur gear on the motor driving a spur/filament combination gear (with a direction reversal, because spur gears) and use a short loop of timing belt with a tensioner to drive the second gear from a pulley that is also mounted to the motor shaft (with no direction reversal, because timing belt).
Of course, creality machines have been using standard spur gears for driving filament for years, and it seems to be working better than one would expect (even with brass gears). The trick is that they use grooved idlers to hold the filament in place, rather than a grooved drive gear (though the rims of the grooved idler do run against the softer brass drive gear in an undesirable way when filament isn't present, or when it gets too thin), and I think this has a lot of advantages, both for making machining/assembly tolerances less critical in general and specifically for getting rid of the problem where a filament that is pushed toward one edge of the grooved drive gear sees a greater effective diameter on that gear. Particularly tight grooves can even result in different parts of the filament seeing different effective gear diameters, contributing to filament stripping. Of course, a dual-drive setup wouldn't have an opposing idler to have a groove in it, so you'd need to rely on other parts to constrain the filament in the direction parallel to the rotational axes of the gears. OTOH, not having the filament sitting in a groove would allow to to get more stationary extruder body structure closer to the grip point of the filament without impinging on the gears.
On Aug 9, 2021, 07:18 -0700, Ryan Carlyle <temp...@gmail.com>, wrote:
Walter's tilted double knurl drive is interesting. Intellectually, it bugs me to have the tilted gear meshing and knurl bite, but I don't know if it'll actually cause problems or not.Somewhere floating around my office I have a prototype of a dual-hob extruder... where is that thing... https://groups.google.com/g/3dp-ideas/c/UJTU75rBymI/m/0Pyq8nhvDQAJ
<Capture.PNG><Capture (1).PNG>
To view this discussion on the web visit https://groups.google.com/d/msgid/3dp-ideas/675552e1-07c7-46f7-9ddc-437d92ebc8a9n%40googlegroups.com.
Reply all
Reply to author
Forward
0 new messages