Zea Engine 3.10.0 Released
54 vues
Accéder directement au premier message non lu

Philip Taylor
16 juin 2021, 13:55:0516/06/2021
à webgl-d...@googlegroups.com
We are happy to announce the release of Zea Engine 3.10.0. This release includes improvements to line picking, along with a collection of bug fixes.
Camera framing is now much more precise and frames on the geometry bounding boxes instead of the bounding sphere of the scene.
Renderer supports various rendering styles, including hidden line rendering.
The full release notes can be found here: Zea Engine Documentation
--
 We make 3D technical communication fast, easy, and open
We make 3D technical communication fast, easy, and open

The contents of this e-mail are confidential with all rights reserved to the author. It is illegal to use or divulge this information without authorization. If you have received this e-mail by mistake, please notify me immediately by replying to the e-mail.
Camera framing is now much more precise and frames on the geometry bounding boxes instead of the bounding sphere of the scene.
Renderer supports various rendering styles, including hidden line rendering.
The full release notes can be found here: Zea Engine Documentation
Philip TAYLOR
CEO, Zea Inc.
Montréal, Québec

Ken Russell
17 juin 2021, 02:29:2617/06/2021
à WebGL Dev List
Congratulations Philip and Zea folks on the release!
One question - the link to the documentation was lost. Could you resend it?
Also, any live demos of some of the new functionality?
Thanks,
-Ken
--
You received this message because you are subscribed to the Google Groups "WebGL Dev List" group.
To unsubscribe from this group and stop receiving emails from it, send an email to webgl-dev-lis...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/webgl-dev-list/CAC7g9xSdG3AdDABPBg%2BBfbAaZwYVMDDCHV_0iSjEB%3Dufsxpuig%40mail.gmail.com.
Philip Taylor
17 juin 2021, 09:06:4617/06/2021
à webgl-d...@googlegroups.com
Thanks for pointing this out.

Here is the docs link again.
This demo shows a robotic arm being driven by a real time Inverse Kinematic solver. There is also a layer of hydraulic pistons and a counter weight also driven by a simpler IK solver.
This demo is a great example of the Operator graph evaluation cleaning the scene.
It also shows our Potree plugin rendering a factory environment in the background.
Url to live demo:
And the gitHub repo:
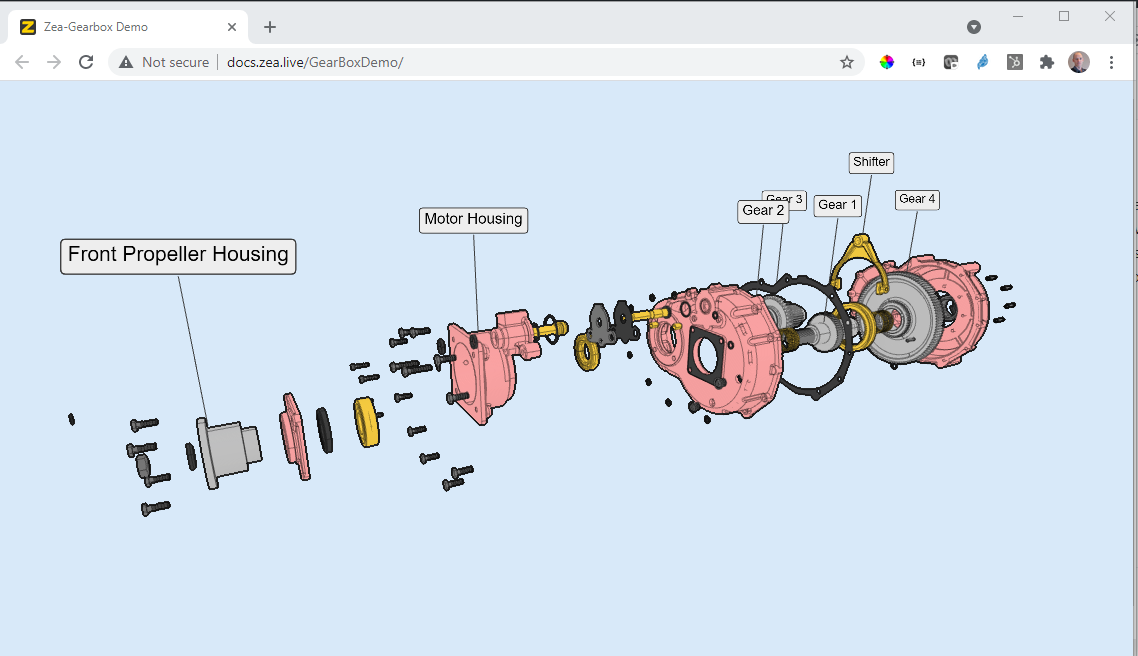
This Gearbox demo shows a gears solver along with an explode solver layered together to provide a nice interaction with this running gearbox.
You can change the gears using the gear stick and click on the casing to activate/deactivate the explode.
Url to live demo:
And the gitHub repo:
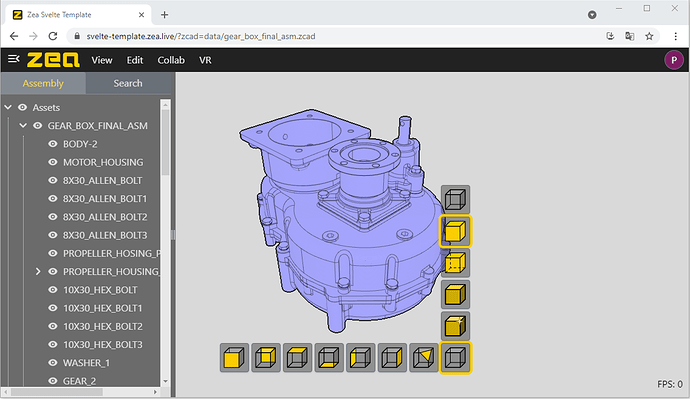
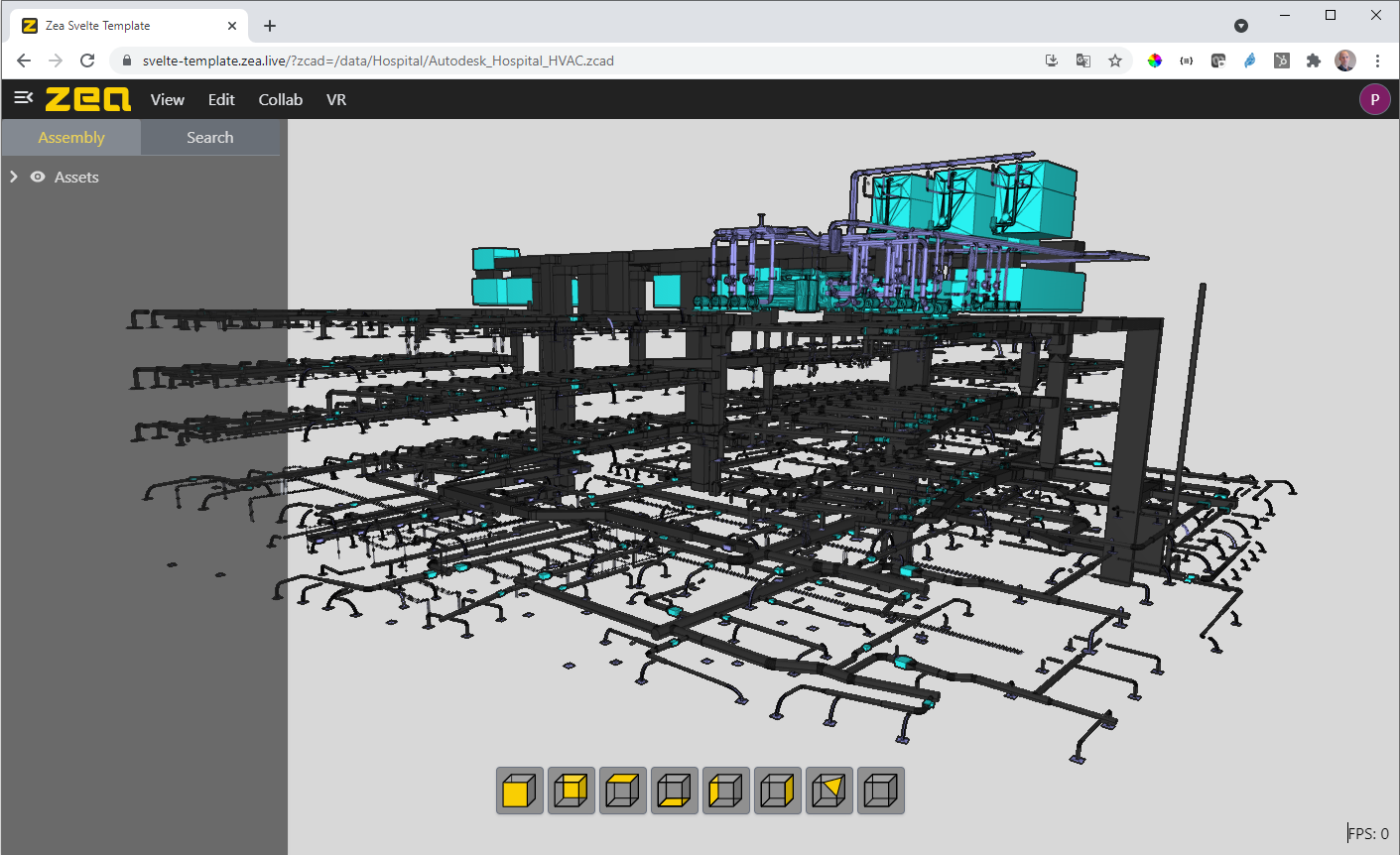
And the Svelte template app provides a place to see how to assemble your own production ready app based on Svelte and Zea Engine.
In the readme you can see links that load various datasets.
To view this discussion on the web visit https://groups.google.com/d/msgid/webgl-dev-list/CAMYvS2ftgzj6SadUxkR209OB4nnteD4Sx12rsQrGDcOMfRjVxA%40mail.gmail.com.
Ken Russell
21 juin 2021, 21:05:2821/06/2021
à WebGL Dev List
Thanks for all of the live demos! They look great and render smoothly. Glad to see that WebGL is working well for your use cases!
Please share any feedback you may have so that we can continue to help you achieve good performance!
-Ken
To view this discussion on the web visit https://groups.google.com/d/msgid/webgl-dev-list/CAC7g9xQSRJ1e46_uTXBo59nUt-h84g%2BK%2B998a3ggn5cvajRKFw%40mail.gmail.com.
Philip Taylor
22 juin 2021, 20:29:4622/06/2021
à webgl-d...@googlegroups.com
Thanks Ken! It's great to be part of this community.
To view this discussion on the web visit https://groups.google.com/d/msgid/webgl-dev-list/CAMYvS2c3wdUW5MnOVDTC6a-iB0o6qd8%3DRJQU8wBLSaAWSwYGwA%40mail.gmail.com.
Répondre à tous
Répondre à l'auteur
Transférer
0 nouveau message