Issues on setup Duet 3 Mini 5+ and Liteplacer Rig RepRap3.3

NismoBoy34
The board is connected and wired in with the Exception of limit switches ? How to wire them in for safety in series ? I believe that limit switches are needed only for either end of an axis and there for in this case we only need 3 limit switches ? X Y Z axis respectively . Running on 3.3v and gnd and activating to input when in fault mode ? Its late i might have this wrong ..
My second issue is i am now stuck on Kinetics feed rates and acceleration and speed .
If i do try tune X axis i get a speed increase ( already increased speed in gcode Async Driver to max limit of 50 000)
After this when i reach a stall and reduce speed and acceleration back to normal we actually dont get a reduction and the machine effectively is stuck on this speed ..
the motors skip constantly . Ive tried tuning in the Jerk control from 100 0000 to 9999999 and an ever slight change is noticed .
Im not sure what im doing wrong ?
Ive got my jog working correctly for all axis on the board X Y Z and C
I do need assistance in Openpnp more likely and feel there might be a bug especially if the speed is not reducing .
Ps ive followed the wiki on setting speeds and have dropped acceleration to 200 and Speed to 600 .. anything more and the machine skips and looses its place .

mark maker
Hi NismoBoy34
> Its been a weekend of Torment trial and error and head bashing
Setting up a controller for a new kind of machine is a difficult
undertaking. You need to understand many, many things, from
underlying physical and mathematical theory, all the way to very
practical matters. Take your time trying to understand these
matters, before acting. You really need to understand what
"feed-rate" and "acceleration" (or "jerk") mean, for the machine.
How is it related to friction and momentum? Get
your head wrapped around it, instead of "trial and error and head
bashing". The latter will not let you reach your goal.
If you don't believe in yourself, or don't have the time or
patience, get a new TinyG and follow the Liteplacer
documentation, use proven configs from the many Liteplacer +
TinyG + OpenPnP users.
But I'm sure you can do it. Hang in there!
Setting up a Duet controller initially is a bit of a leap, because the online-configurator is only really good for a 3D printer (last time I looked). So you need to get your config.g right, manually.Because the Duet people probably think they got it covered with the configurator, there is no high-level guidance for manual configuration (AFAIK). But the individual configuration commands are very, very well documented. You just need to take your time, putting the puzzle together, one piece after the other. RTFM!
https://duet3d.dozuki.com/Wiki/Gcode
And for a jump start, I sent you a link to Wolfgang's config before. Have you looked at it?
https://groups.google.com/g/openpnp/c/fl07Df18ehA/m/3zvF-vwbAAAJ
After that, please be sure to follow Issues & Solutions
in OpenPnP. It should recognize Duet and propose the right
solutions for you. Use the blue [i] buttons for help from the
Wiki. Do not try to do it manually.
If you already tried manually, consider starting a fresh OpenPnP
config from scratch.
When you don't understand an issue or solution, or when you think
I&S must be wrong, come back here with the specifics. Do not
dismiss or manually override I&S, just to "make it go away and
hope for the best".
https://github.com/openpnp/openpnp/wiki/Issues-and-Solutions
Download the latest testing version, it has extended support:
https://openpnp.org/test-downloads/
For the Kinetics, you can not port over the TinyG
settings, because TinyG has Jerk control, whereas Duet
only has Acceleration control. And the Liteplacer software
makes a big mess of that, confusing the physical terms "jerk"
and "acceleration", so forget all what you saw there.
Instead, think physical:
https://makr.zone/thinking-machine/82/
Try to really understand the settings:
More specifically:
https://github.com/openpnp/openpnp/wiki/Machine-Axes#what-values-should-i-set
Start with low speeds. Get control first, break records
later!
And remember: follow Issues & Solutions!
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c320d7ca-99bd-40c9-aec9-ae05d716f28cn%40googlegroups.com.
NismoBoy34
Agreed i did do alot of reading and learn best through trial and error .. on hands works well for me .
To highlight a few points .
"And for a jump start, I sent you a link to Wolfgang's config before. Have you looked at it?
https://groups.google.com/g/openpnp/c/fl07Df18ehA/m/3zvF-vwbAAAJ"
I did use this exact file ( of course with my alterations to get the results required ) and if you check my first post has the config.g attached .
https://github.com/openpnp/openpnp/wiki/Machine-Axes#what-values-should-i-set
i then edited the config .g and commented out the acceleration and max speeds from the file and got slightly more consistent results but still cannot achieve much more than homing speeds .
I did try the online configurator .. "Setting up a Duet controller initially is a bit of a leap, because the online-configurator is only really good for a 3D printer (last time I looked). So you need to get your config.g right, manually." And found the result to be very off track .. Additions of extruders that arent required for my setup and heating beds too ... hmmm i did decide not to use it for this reason .
but in my case none seem to be giving the result i need .
If i enable the commented sections in Config.g close and reopen openpnp i get huge jumps in speed but openpnp has no bearing on the speed set and the result unless the values are below 1000.00 for speed and acceleration .
NismoBoy34
M569 P0.0 S1 ; physical drive 0.0 goes forwards
M569 P0.1 S0 ; physical drive 0.1 goes forwards
M569 P0.2 S1 D3 ; physical drive 0.2 goes forwards
M569 P0.3 S1 ; physical drive 0.3 goes forwards
;M584 X0.2 Y0.0:0.1 Z0.3 C0.4 ; set drive mapping
M584 X0.2 Y0.0:0.1 Z0.3
M584 C0.4 R1 S0 ; A+B 360°-continuous, but linear feed-rate
M350 X16 Y16 Z16 A16 B16 I0 ; configure microstepping with interpolation
M92 X80.00 Y80.00 Z80.00 C8.8888888 ; set steps per mm
;M566 X150.00 Y150.00 Z150.00 C250.0 ; set maximum instantaneous speed changes (mm/min)
;M566 X50000.00 Y50000.00 Z400.00 C400.0 ; set maximum instantaneous speed changes (mm/min)
;M203 X80000.00 Y50000.00 Z12000.00 C200000.0 ; set maximum speeds (mm/min)
;M203 X150000.00 Y150000.00 Z12000.00 C200000.0 ; set maximum speeds (mm/min)
;M201 X6000.00 Y5500.00 Z2000.00 C5000.00 ; set accelerations (mm/s^2)
;M201 X80000.00 Y80000.00 Z2000.00 C5000.00 ; set accelerations (mm/s^2)
mark maker
Send the machine.xml for the
OpenPnP side.
For the Duet side, I'm no expert and frankly, I cannot provide
support for everything, I have to leave this to others. I
don't understand, why Wolfgang's config, combined with the
excellent documentation by Duet, does not give you pointers for all
that is needed on a simple machine like a Liteplacer.
Maybe @dc42 of Duet can help.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/161c6777-7dca-4810-9f2f-3d68c295bfd3n%40googlegroups.com.

dc42
- If a G1, G2 or G3 command is received, or a G0 command is received and the firmware is in FDM mode (the default), then movement will be at the lower of the speed specified using the F parameter and the limit set by M203.
mark maker
> Does OpenPnP provide a trace facility that allows you to see what G-code commands it is sending to the Duet?
Yes. The log will (among many other things) log the commends
sent, with timestamps etc.. You need to set logging to TRACE level
on the Log tab.
There is also a dedicated Log Gcode option on the driver.
It will log the Gcode in a separate log file, i.e. without all the
other stuff (no timestamps, though).
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/58280af5-e4ca-44b6-aed1-feb8e80ec02an%40googlegroups.com.
Adam Saiyad
Regarding the Gcode logging will have to enable and run some movements etc and posts results soon ...
ive set all speeds and acceleration to 100.00 for the time being to move forward with setup and calibration which seems to be working .
I have the homing switches wired in series for now and have them fed into the io1.in and io2.in and io4.in and mapped in the config.g file upon testing in DWC in the web calibraton for home on each of the X Y Z have worked .. although each time on Z calibration asks me to lower to the bed ... and press ok .
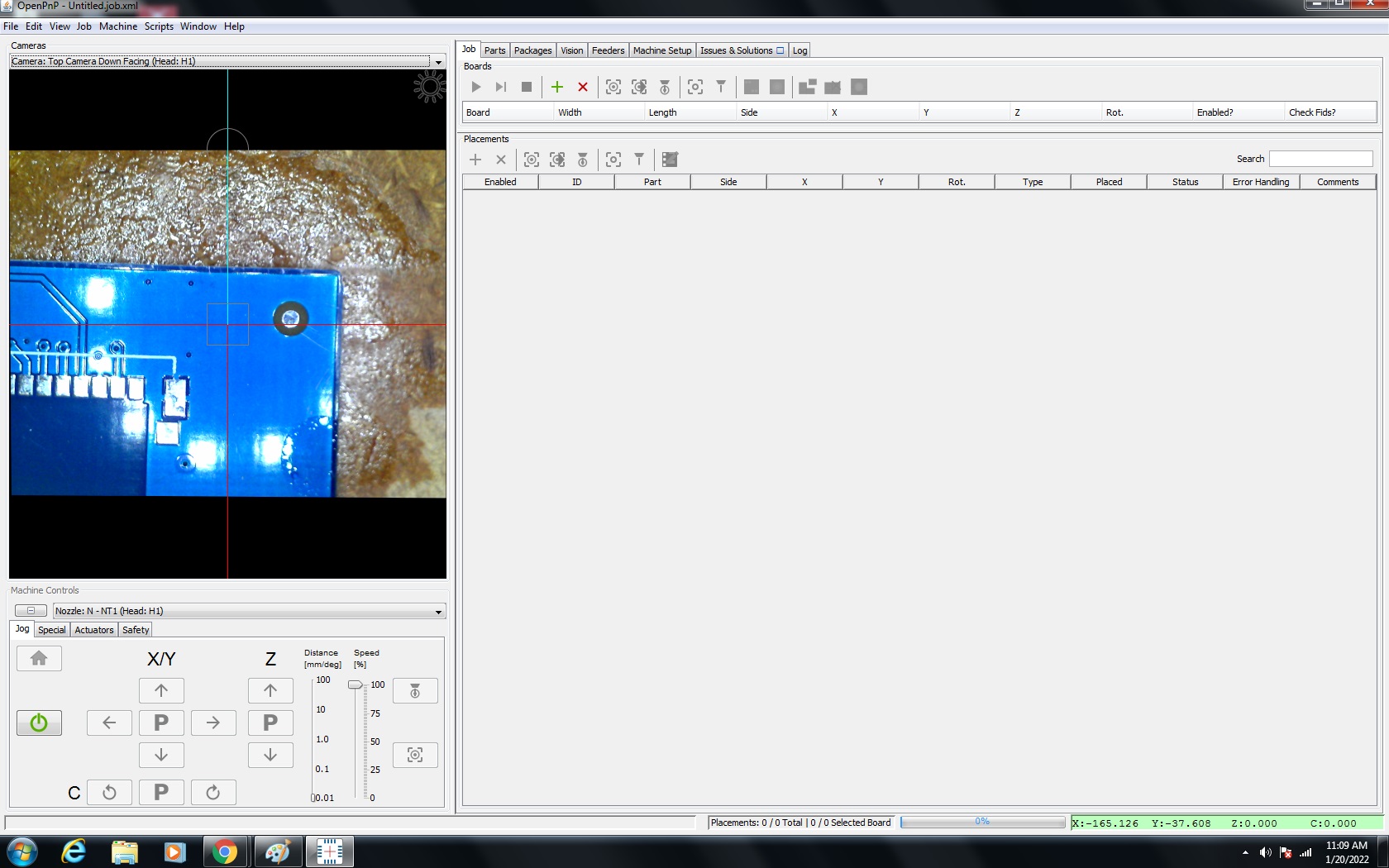
Vision is all good too i hope but seems to be correct with Fiducual calibration 1 and 2 marks but as mentioned Z slack is where im having an issue .
Will upload some logs soon from gcode logging .. and my new config.g file .
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/fAF-xz17e5A/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/7084a7ae-1098-57c6-5f5f-687c1cb9c3f6%40makr.zone.
NismoBoy34
First question how would and should homing work in this case ? We have fiducial homing which i feel im not yet ready to commence using and we have Min Sensor homing using Switches .
When open pnp opens up what should the coming procedure be ?
In my case i open DWC web and see differences between actual value ( real world of cordinates ) vs what open Pnp is interpreting . This means there is a disconnect !
How do i go about correcting this . Ive been trying to home in DWC which works a treat and values are all 0.000 or at least close to 5.000 on the absolute side .
NismoBoy34
2022-01-20 11:09:39.065 Scripting TRACE: Scripting.on Startup
2022-01-20 11:09:39.287 AbstractBroadcastingCamera TRACE: Camera Top Camera Down Facing thread 27 started.
2022-01-20 11:09:39.425 AbstractBroadcastingCamera TRACE: Camera Bottom Camera Facing up thread 29 started.
2022-01-20 11:12:05.946 AbstractMachine TRACE: Exception caught, executing pending motion: java.lang.Exception: Machine has not been started.
at org.openpnp.spi.base.AbstractMachine$1.call(AbstractMachine.java:569)
at java.util.concurrent.FutureTask.run(Unknown Source)
at java.util.concurrent.ThreadPoolExecutor.runWorker(Unknown Source)
at java.util.concurrent.ThreadPoolExecutor$Worker.run(Unknown Source)
at java.lang.Thread.run(Unknown Source)
2022-01-20 11:12:05.975 MessageBoxes DEBUG: Error: java.lang.Exception: Machine has not been started.
2022-01-20 11:12:08.646 ReferenceMachine DEBUG: setEnabled(true)
2022-01-20 11:12:14.779 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(G21 ; Set millimeters mode, 7000)...
2022-01-20 11:12:14.781 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(G90 ; Set absolute positioning mode, 7000)...
2022-01-20 11:12:14.792 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> G21 ; Set millimeters mode
2022-01-20 11:12:14.796 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:14.797 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:14.799 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> G90 ; Set absolute positioning mode
2022-01-20 11:12:25.326 GcodeDriver DEBUG: Detecting firmware and position reporting, please ignore any errors and warnings.
2022-01-20 11:12:25.335 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M115, 7000)...
2022-01-20 11:12:25.350 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M115
2022-01-20 11:12:25.352 GcodeDriver$ReaderThread TRACE: [serial://COM9] << FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet 3 Mini5plus WiFi FIRMWARE_DATE: 2021-06-15 21:46:20
2022-01-20 11:12:25.353 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:25.353 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M114, 7000)...
2022-01-20 11:12:25.356 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M114
2022-01-20 11:12:25.358 GcodeDriver$ReaderThread TRACE: [serial://COM9] << X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:25.358 GcodeDriver TRACE: Position report: X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:25.365 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M584, 7000)...
2022-01-20 11:12:25.365 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:25.376 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M584
2022-01-20 11:12:25.380 GcodeDriver$ReaderThread TRACE: [serial://COM9] << Driver assignments: X0.2 Y0.0:0.1 Z0.3 (c)C0.4, 4 axes visible
2022-01-20 11:12:25.381 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:25.382 GcodeDriver DEBUG: End detecting firmware and position reporting.
2022-01-20 11:12:26.357 GcodeDriver DEBUG: Detecting firmware and position reporting, please ignore any errors and warnings.
2022-01-20 11:12:26.358 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M115, 7000)...
2022-01-20 11:12:26.360 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M115
2022-01-20 11:12:26.362 GcodeDriver$ReaderThread TRACE: [serial://COM9] << FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet 3 Mini5plus WiFi FIRMWARE_DATE: 2021-06-15 21:46:20
2022-01-20 11:12:26.366 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M114, 7000)...
2022-01-20 11:12:26.366 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:26.370 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M114
2022-01-20 11:12:26.372 GcodeDriver$ReaderThread TRACE: [serial://COM9] << X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:26.373 GcodeDriver TRACE: Position report: X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:26.373 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:26.373 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M584, 7000)...
2022-01-20 11:12:26.376 GcodeDriver$ReaderThread TRACE: [serial://COM9] << Driver assignments: X0.2 Y0.0:0.1 Z0.3 (c)C0.4, 4 axes visible
2022-01-20 11:12:26.376 GcodeDriver DEBUG: End detecting firmware and position reporting.
2022-01-20 11:12:26.378 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:26.376 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M584
2022-01-20 11:12:44.637 GcodeDriver DEBUG: Detecting firmware and position reporting, please ignore any errors and warnings.
2022-01-20 11:12:44.637 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M115, 7000)...
2022-01-20 11:12:44.639 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M115
2022-01-20 11:12:44.641 GcodeDriver$ReaderThread TRACE: [serial://COM9] << FIRMWARE_NAME: RepRapFirmware for Duet 3 Mini 5+ FIRMWARE_VERSION: 3.3 ELECTRONICS: Duet 3 Mini5plus WiFi FIRMWARE_DATE: 2021-06-15 21:46:20
2022-01-20 11:12:44.641 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:44.641 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M114, 7000)...
2022-01-20 11:12:44.644 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M114
2022-01-20 11:12:44.646 GcodeDriver$ReaderThread TRACE: [serial://COM9] << X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:44.646 GcodeDriver TRACE: Position report: X:-73.700 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -5896 -85 -398 0 Machine -73.700 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:12:44.646 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:12:44.647 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M584, 7000)...
2022-01-20 11:12:44.649 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M584
2022-01-20 11:12:44.649 GcodeDriver$ReaderThread TRACE: [serial://COM9] << Driver assignments: X0.2 Y0.0:0.1 Z0.3 (c)C0.4, 4 axes visible
2022-01-20 11:12:44.650 GcodeDriver DEBUG: End detecting firmware and position reporting.
2022-01-20 11:12:44.650 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:14:49.619 AbstractHeadMountable DEBUG: Top Camera Down Facing.moveTo((-1.000000, 0.000000, 0.000000, 0.000000 mm), 1.0)
2022-01-20 11:14:49.648 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M204 S500.67 G1 X-1.0000 F1342.54 ; move to target, 7000)...
2022-01-20 11:14:49.658 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M204 S500.67 G1 X-1.0000 F1342.54 ; move to target
2022-01-20 11:14:49.661 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M400 ; Wait for moves to complete before returning, 7000)...
2022-01-20 11:14:49.661 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M114 ; get position, -1)...
2022-01-20 11:14:49.662 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:14:49.667 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M400 ; Wait for moves to complete before returning
2022-01-20 11:14:49.669 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M114 ; get position
2022-01-20 11:14:53.041 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:14:53.042 GcodeDriver$ReaderThread TRACE: [serial://COM9] << X:-1.000 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -80 -85 -398 0 Machine -1.000 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:14:53.043 GcodeDriver TRACE: Position report: X:-1.000 Y:-1.059 Z:-4.980 C:0.000 E:0.000 Count -80 -85 -398 0 Machine -1.000 -1.059 -4.980 0.000 Bed comp 0.000
2022-01-20 11:14:53.044 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:-1.000000, y:-1.059000, C:0.000000, Z:-4.980000)
2022-01-20 11:14:53.046 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2022-01-20 11:14:53.050 AbstractMotionPlanner DEBUG: Reported location changes current location from (x:-1.000000, y:0.000000, C:0.000000, Z:0.000000) to (x:-1.000000, y:-1.059000, C:0.000000, Z:-4.980000)
2022-01-20 11:14:53.051 ReferenceActuator DEBUG: Top Camera LED.actuate(true)
2022-01-20 11:14:53.052 GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M4 M42 P3 S1, 7000)...
2022-01-20 11:14:53.044 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
2022-01-20 11:14:53.056 GcodeDriver$ReaderThread TRACE: [serial://COM9] << Error: M4: Command is not supported in machine mode FFF
2022-01-20 11:14:53.057 GcodeAsyncDriver$WriterThread TRACE: [serial://COM9] >> M4 M42 P3 S1
2022-01-20 11:14:53.057 GcodeDriver$ReaderThread TRACE: [serial://COM9] << ok
mark maker
OpenPnP is showing you conceptual tool coordinates. So
for one thing they depend on the tool selected in Machine
Controls. If you move the Nozzle to a certain X/Y coordinate, and
then the camera to the same X/Y coordinates, they should be on the
same spot. But obviously the controller will have different
coordinates, because the Nozzle is shifted (by the so-called head
offsets) from the Camera.
There can be other things, like axis transformations, run-out
compensation, etc. if applicable.
All that's the difference between raw controller coordinates and
conceptual OpenPnP coordinates.
As to the other questions, it seems you really need to increase
your knowledge about such machines. Learn about homing and a safe
homing order (e.g. Z must home to max first, and only then can X/Y
home safely). To a minimal degree, you need to understand these
things. From an OpenPnP stand-point, we take such a level of
understanding and controller side setup for granted.
To be a bit blunt: this is not a Product Support Service channel,
this is still a DIY community, and the Y means "Yourself" 😁.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/456f6dcf-b250-48ab-bab6-193bc5d1f4acn%40googlegroups.com.
NismoBoy34

bert shivaan
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/49913266-d30f-4a96-a116-310e1fd603dan%40googlegroups.com.
NismoBoy34
i was asking how the initial power up and power on should work .
Now that you have explained it makes sense that it is partial manual and Fiducial homing based which is great news .
being used to light placer it was mechanical endstops with switches and each open of the software requires a re-home to take place and the machine takes ages to get Z home and X home then Y home and so forth a drag ...
But im happy with the response you have given its all new to me and im sure will be all new to other prospective users . I thank you for taking the time to read and get what my question was .. amongst all the other queries and misunderstandings .
dc42
NismoBoy34
Just to confirm that i now have a functioning setup and again thank you for your assistance and help .. i do have some placement issues with TQFP components will post this up as a new question if any one wants my config files etc please do leave a note . Im very happy with the results . Openpnp is great thank you to the contributors for their effort and time ..
bert shivaan
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/ce3da365-3018-4789-aa11-ea68dcb20f1an%40googlegroups.com.
