Guiding Issue with Mesu 200 MKII mount

Jose Ignacio Sanchez Rodriguez

bw_msgboard
Hi Jose. This is kind of an unusual situation – here’s a view of what’s going on showing only the RA in red:

About 10 minutes before you saw the big problem (point 2), the RA guide corrections were already not having any visible effect (point 1). What’s important here is that the guide corrections are east with the scope on the west side of the pier. With typical kinds of cable snags or static resistance or a loose clutch, you would expect the guide corrections would have to be west because something would be interfering with the ability of the mount to track west at the sidereal rate. Your situation is just the opposite. You haven’t told us whether you’re using a separate guide scope, but it looks like some part of the guiding assembly is moving around – you can think of it as having the guide camera “falling” too much to the west. Of course, this assumes the mount is tracking at a constant sidereal rate. One common source of this type of problem is a focuser that isn’t completely rigid, often because the focus tube is slightly loose in its housing - but there’s really no way for us to guess. The total amount of movement here is of course quite small – it was equivalent to a sag of the guide camera sensor by about 12 microns, ¼ the thickness of a human hair.
There is one other operational mistake you’ve made that is giving you trouble albeit nothing to do with this tracking issue. You’re using a LodeStar guide camera which is a 16-bit camera, but you’ve specified a saturation level in PHD2 of 256. So you’re crippling your ability to use the best stars in the field of view. For 16-bit operation – which is what you want – you should specify a saturation level of 65000 or somewhat higher. You will then find that the auto-select function will work much better for you.
Good luck – let us know when you’ve figured out the problem.
Bruce
--
You received this message because you are subscribed to the Google Groups
"Open PHD Guiding" group.
To unsubscribe from this group and stop receiving emails from it, send an email
to open-phd-guidi...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/0c73cc10-0700-4704-9ea9-c7c852979bdcn%40googlegroups.com.
Jose Ignacio Sanchez Rodriguez
bw_msgboard
Hi Jose. One other thing occurred to me after I sent the e-mail although it’s probably unlikely. If for some reason the RA balance of the scope was significantly out of adjustment – in this case with the counterweights “too light” – it could be creating an unwanted torque to the west. I don’t know anything about the mount and how sensitive it is to balance or what the clutch system is like. Something like that would be consistent with the problem growing worse as you get closer to the meridian. And of course this sort of blind analysis can never rule out cable problems. With the scope on the west side of the pier, anything that tugs on the gear hanging on the back of the scope can create unwanted motion to the west – I have encountered that myself.
Running the Guiding Assistant for extended times is definitely a good idea. You might want to do that in multiple pointing positions – both sides of the pier and maybe two separate distances from the meridian on each side.
Hope you can track it down,
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/9d6f97a0-3e67-4f66-8717-fc8386bbc8ben%40googlegroups.com.
Jose Ignacio Sanchez Rodriguez
bw_msgboard
This sounds promising, let us know what you find out.
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/5ab5d993-ef37-4153-a8c3-737f24e501ebn%40googlegroups.com.
{kind=link}
Jose Ignacio Sanchez Rodriguez
This was using the last calibration from the night before (section 9 on Friday´s April 2nd log) which was performed at high DEC. I include that log in the link above for reference. I have "Use DEC compensation" selected.
Bruce Waddington
Hi Jose, see below.
From: open-phd...@googlegroups.com [mailto:open-phd...@googlegroups.com] On Behalf Of Jose Ignacio Sanchez Rodriguez
Sent: Sunday, April 04, 2021 8:32 AM
To: Open PHD Guiding <open-phd...@googlegroups.com>
Subject: Re: [open-phd-guiding] Guiding Issue with Mesu 200 MKII mount
Hello,
I wrote a while ago about issues guiding with a new friction drive mount. The manufacturer asked me to send back the mount to him and re adjusted it. Last weekend I had the chance to try it under the stars and noticed some issues:
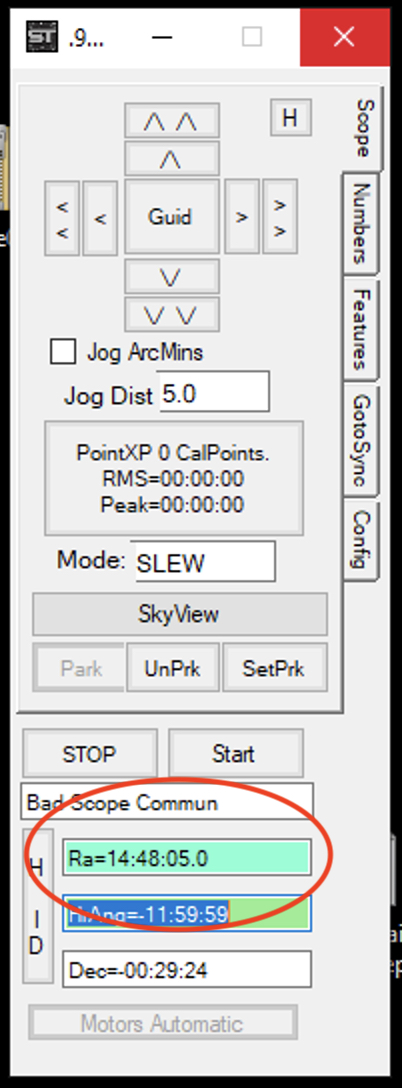
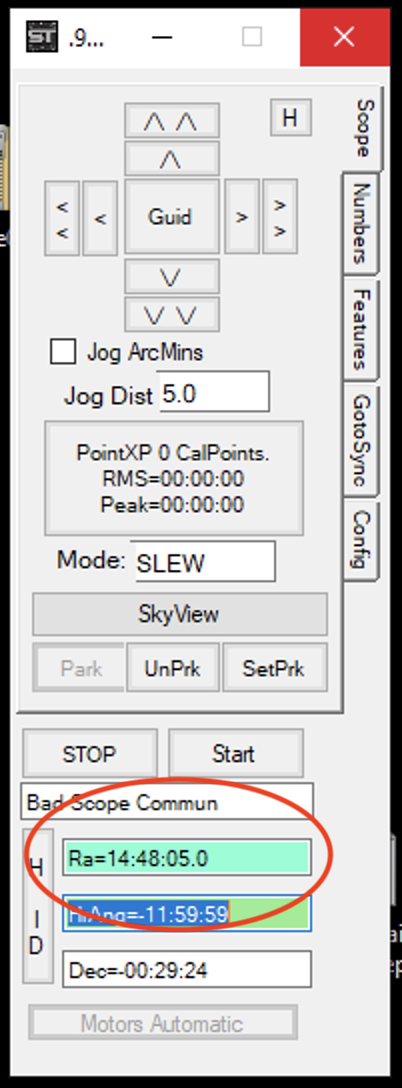
1.- The mount would stop tracking close to the equator: It does not reflect on the phd2 logs nor is completely repeatable, but at some positions close to the equator the mount stops tracking. It has happened 3 times during the weekend. I just close the program I use to control the mount and open it again, re initialise the mount and set it to tracking and it works. It is also not related to horizon limits.
As you know, this has nothing to do with PHD2 – PHD2 doesn’t start and stop tracking. In addition to horizon limits, you should probably check for any meridian limits in your app or in the mount driver. Some of these software components can be configured to stop tracking at the meridian in order to avoid a counterweights-up situation.
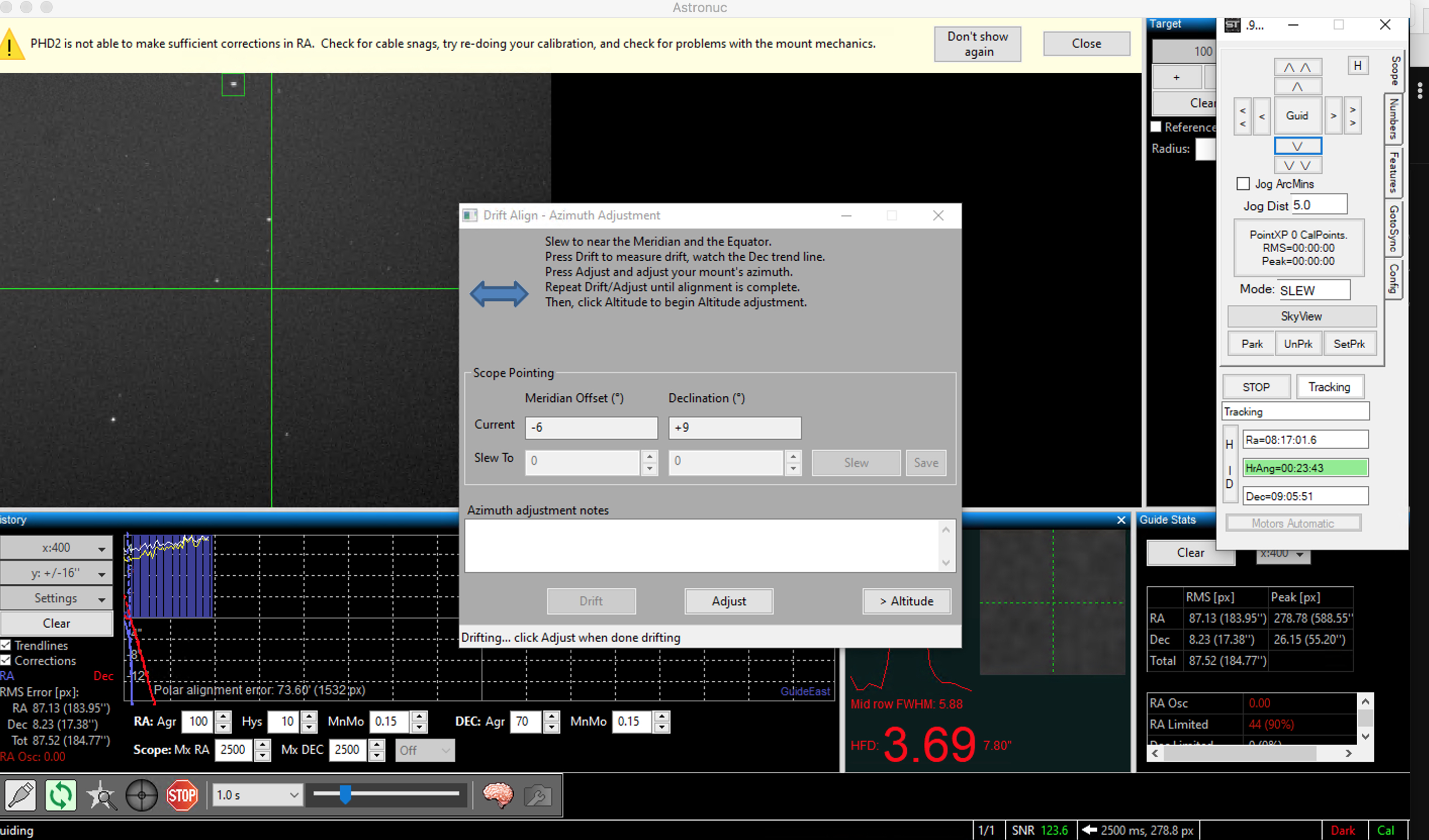
2.- Mount does not respond to RA corrections while performing Drift Alignment with the PHD wizard: This is reflected in the first segment of Saturday April 3rd´s log.
This was using the last calibration from the night before (section 9 on Friday´s April 2nd log) which was performed at high DEC. I include that log in the link above for reference. I have "Use DEC compensation" selected.
This is because your mount wasn’t tracking at anywhere near the sidereal rate. PHD2 was pounding away with constant 2500ms guide pulses to the west but these weren’t big enough to overcome the huge tracking error. Here’s what it looked like:

There’s no way to know why this happened but it doesn’t have anything to do with guiding. That said, don’t calibrate at such high Dec positions, that serves no purpose and can produce inferior calibration accuracy.
Is it possible that using a calibration performed at high DEC results in the mount not responding at all to RA corrections while drift aligning close to the equator?
I also noticed that, while the drift alignment sections (6 and 7 on Saturdays log) show very little polar alignment error, the PA error during normal guiding (which was very good with RMS of 0.3-0.4 arctic) is very big (5-7 arcmin). Is that normal?
The amount of Dec drift changes as a function of the pointing position so that can affect the estimate. The other thing to consider is whether the mount axes are moving at all after you’ve completed the polar alignment. In your case, none of it appears to matter unless you’re using a gigantic imaging camera and see field rotation – which is pretty unlikely.
Even if the guiding is quite good I noticed that sometimes I have spikes in RA and DEC and the RA spikes take 2 or even 3 pulses to correct, even when I use 100 aggression.
It’s not worth pursuing, these are tiny guide star deflections, your guiding is fine. I don’t advise leaving the aggression at 100 however.
I would greatly appreciate if you could shed some light on this. I find this behaviour odd and wonder if there is still something wrong with my RA motor encoders. I know that it seems odd to complain when I am getting 0.3-0.4 RMS, but I am planning to approach that limit soon with a smaller scale system.
Your guiding is fine. If you’re getting a total guiding RMS of 0.3 – 0.4 arc-sec, you’ll get the same results regardless of image scale. You’re not likely to get better with any off-the-shelf mount and PHD2-style guiding and probably don’t need to unless you’re in a mountaintop observatory with 1 arc-sec seeing. In that case, you might want to look at an AO solution.
Cheers,
Bruce
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/b0430da4-4c12-458c-a488-b1ff57cfa3e6n%40googlegroups.com.
Jose Ignacio Sanchez Rodriguez