looking for recommendation of an H-bridge module

Guy Ovadia
I'm looking for a DC motor (H-bridge) driver board with the following specs:
- over 3A current (preferably 5A or more so it's not used at max capacity)
- over 24V voltage (again, 28V or more is better)
- looking for a ready to use board, as opposed to a bare chip
- fast availability is a plus (someone selling in Israel, or a fast shipment from abroad).
- I don't want undocumented "who knows what's that chip"-based boards, like the multiple offerings I found on eBay. I want good documentation.
recommendations?
thanks!
Guy.

Yair Reshef
050-6301212
tlv, israel
Yair Reshef

Udi Finkelstein
They are rated up to ~50V, but only 2A for continuous use. However, each board is a dual motor driver, and you can combine 2 channels to drive 1 motor up to 4A.
The major drawback, as I've wrote here in the past, is that this IC is based on a bipolar design, so expect a large heat dissipation.
At 24V/2A for each channel, you can expect 3V to 4V drop on the board itself, which means:
1. You either drive it with 28V and take the risk the drop will be smaller and you may go over the 24V
2. Drive it with a lower voltage and end with less than 24V on your motor.
On the positive side, these boards starts at $5 on ebay (a dual channel that's turned into single channel).
The pololu boards Yair mentioned are great, but much more expensive.
I would take a look at http://www.pololu.com/catalog/product/1451 or http://www.pololu.com/catalog/product/2502
Notice that the dual board is incorrectly specced at 16V, which caught my attention because the single chip version of the same board is specced at 14V.
When you check the actual page you see that the dual motor is at specced at 24V.
If you feel 24V max is too close to your target, you can check http://www.pololu.com/catalog/product/755 at ~$40 (single channel 30V/15A).
Udi
Guy Ovadia
btw any hint of what is the chip on these boards?
http://www.pololu.com/catalog/product/756
(i.e. the 28 pins chip, not the mosfets)
Udi Finkelstein
http://forum2.pololu.com/viewtopic.php?p=27184&sid=3c388b49927d600403fb01dd12effc8c#p27184
BTW, if you look closely, all single channel VVvAA boards (e.g. 36v9, 25v15, etc.) use the same md07a board with different MOSFETs:
http://forum.pololu.com/viewtopic.php?f=15&t=3250&p=15080&hilit=36v9#p15080
The 26v9 is actually a 18v15 picture.
Udi
Guy Ovadia
http://www.allegromicro.com/en/Products/Motor-Driver-And-Interface-ICs/Brush-DC-Motor-Drivers/A3941.aspx
I think those will do for our purpose.
Udi Finkelstein
Guy Ovadia
Udi Finkelstein
One the things that made me raise an eyebrow at first was that I specifically remembered that the center pins on both sides of the IC were wide, like those in power amp ICs.
Upon a closer look at the pololu board I see it's only the PCB contact that's wide. The IC pin themselves are all the same.
http://b.pololu-files.com/picture/0J1024.600.jpg?7cce1365759b4b4f62ea07884b0c3621
Guy Ovadia

jr
I was toying with building my own Hbridges - but imagine the ultimate component cost of 4 hipower mosfets per motor coil and thus 8 per motor, will approach the commercial unit cost
Guy Ovadia
I'd recommend using the highest voltage you can get a good PSU for (48V is reasonably common), since more voltage = faster current waveform risetime = higher possible step rates with some torque remaining = faster motors. find a PSU and choose drivers appropriately.

Moty Marcos Dorfman
Guy Ovadia
http://www.ebay.com/itm/CENTENT-MICRO-STEPPER-7-amp-CNO142-MOTOR-DRIVER-EXP-5344-EBWH-/320903286311?pt=LH_DefaultDomain_0&hash=item4ab7538e27
Moty Marcos Dorfman
jr

Yuval Adam
Udi Finkelstein
Do you have a carrier PCB for these?
The PowerPAK-SO8 footprint has a large contact below, probably intended for heat spreading.
http://www.vishay.com/docs/64721/an913.pdf
jr, Do you want to design a PCB yourself? This is ideal for a x10 5cmx5cm PCB order seeedstudio or iteadstudio.
Yair Reshef
Udi Finkelstein
The problem is with the NMOS jr wants to use. They seem to be designed for excessive heat dissipation, and you probably want to have a board where the 2nd layer uses copper pour.
The large pad is drain connection, so you may want to split the 2nd layer into two halves, one for GND and one for VDD since 2 transistors will have their drain on GND and 2 will have it on VDD.
jr

Yair Reshef
Udi Finkelstein
Yair - please check if yours are for the 50mil spacing, wide SOIC variant.
2. I have to confess I haven't made any PCB yet (at least in the last 15 years, older stuff done with OrCAD on DOS doesn't count), but I have both Eagle 6 and KiCAD installed, although Eagle now has an open, XML-based file format, I'm still trying to go the KiCAD path first if not for the fact that it is not size limited, and mastering it would be better in the long run.
3. I have 2 examples of (the same) 50mil SOIC pattern protoboard that coexists with DIP! I've seen this in two boards, both are very old (10-20 years old), yet I haven't see this pattern ever used before.
I would like to re-do it in either KiCAD or Eagle.
https://picasaweb.google.com/udi.finkelstein/PCB?authkey=Gv1sRgCLnuvPO5u6SKqAE
I think this kind of protoboard makes the generic 100mil grid useless.
Udi
Yair Reshef
Universal SMD PCB Board : S Series 06
Universal SMD PCB Board : SOIC to DIP Adapters
http://stores.ebay.com/Warf-Electronics-shopping/Universal-PCBs
warf is actually i good thai online store
On Mon, Oct 15, 2012 at 9:15 PM, Yair Reshef <yai...@gmail.com> wrote:
>
> its kinda nice the set i have, i dont know where i bought it from.
> it has all kinds , 50mm included
> http://i.imgur.com/VBMGO.jpg
>
> On Mon, Oct 15, 2012 at 7:11 PM, Udi Finkelstein <udi.fin...@gmail.com> wrote:
>>
>> 1. I was about to ask if you have a SOIC adapter (50mil spacing), but Yair already replied.
>> Yair - please check if yours are for the 50mil spacing, wide SOIC variant.
>>
>> 2. I have to confess I haven't made any PCB yet (at least in the last 15 years, older stuff done with OrCAD on DOS doesn't count), but I have both Eagle 6 and KiCAD installed, although Eagle now has an open, XML-based file format, I'm still trying to go the KiCAD path first if not for the fact that it is not size limited, and mastering it would be better in the long run.
>>
>> 3. I have 2 examples of (the same) 50mil SOIC pattern protoboard that coexists with DIP! I've seen this in two boards, both are very old (10-20 years old), yet I haven't see this pattern ever used before.
>> I would like to re-do it in either KiCAD or Eagle.
>> https://picasaweb.google.com/udi.finkelstein/PCB?authkey=Gv1sRgCLnuvPO5u6SKqAE
>> I think this kind of protoboard makes the generic 100mil grid useless.
>>
>> Udi
>>
>> On Mon, Oct 15, 2012 at 6:03 PM, jr <jeremy...@gmail.com> wrote:
>>>
>>> I have a bunch of powermos of various vintages so I will try to use those up first, and try to solder the si9978 or get one of those connector boards yair linked,
>>> and heatsink the powermos with chunks of aluminum or copper.
>>>
>>> the nmos transistor i linked was just an example for a current price - maybe its particularly well suited, I am not sure
>>>
>>> If I actually get something successfully working I would love to do a seedstudio or itead pcb with some standard nmos and proper heat solution as udi suggested
>>> i know sefi was after a high current stepper driver for one and guy just got some so there seems a bit of demand for this.
>>> What do people use for layout these days? is the 'eagle' still around?
>>>
>>> the 9978 hbridge ckt can be seen here.
>>> i need to add the logic going from 'step' and 'direction' standard control signals, to signals for each of two SI9978's (each 9978 is a single H-bridge driver, for
>>> running a single coil in either direction; the stepmotor has two coils to be run in a certain pattern for turning a stepmotor clockwise or anticlockwise, rather exhaustive explanation here ).
>>> I'd also like to add a manual step option so you can test your cnc , robot arm or whatever without needing a pc
>>> nice to have - optoisolation, microstepping, antiresonance , step/position counter, bitcoin miner
>>>
>>>
>>>
>>>
Yair Reshef
jr
jr
jr
Guy Ovadia
jr
jr

Kfir B.
jr
Moty Marcos Dorfman
Moty Marcos Dorfman
jr
jr
Yair Reshef
jr
I think this might do it - suspiciously simple....lets say the nmos turns on at Vgs>=10V and I want to start closing it off when I>6A, so put a 10/6ohm resistor at the base of the nmos acting as a low-side switch. By the time current hits 6A the nmos wil be totally off. If this works, I'm retiring

Udi Finkelstein
http://www.digikey.com/schemeit/project/al5/h-bridge-shutdown
I assumed you are using an H bridge and already have external MOSFETs
the small 0.05 shunt resistor builds a small voltage as the current grows.
When the comparator Vref, set by R4/R5 is lower than the voltage at R2, it will shutdown the MOSFETs via diodes.
big warning 1:
I have very little experience in real life analog and motor circuits.
big warning 2:
since the motor has reactive elements, I don't know what it will do to your MOSFETs when you suddenly disconnect it and cut the current to 0.
but on the other hand, you could have done the same using the logic controls.
your Q was a nice excuse to try digikey's online schematic capture.
I think it's the best web based one I've seen.
Udi
Yair Reshef
Guy Ovadia
Jeremy, you do not want something which is diode-like, because it will waste humongous amounts of power. All the voltage that will not fall on the motor, will fall on that "edoid", i.e. 6 amps at 60-70 volts... you can see where it leads (to a lot of smoke, or at least huge power waste).
In contrast, Udi's solution, as well as commercial stepper motor drivers, work in switched mode operation. the "magic" of switched mode is that there is no theoretical limit to the efficiency - the closer your switching device is to an ideal switch (meaning no voltage drop and zero switching time), the closer to 100% efficiency you can get. A linear solution like such an "edoid" is, by definition, wasting all the excess input voltage as heat.
a few notes about Udi's solution:
- as Udi commented, simply cutting off the current to the motor is not necessarily the best thing to do. You have to provide some path for the current to recirculate. There are several common approaches to this (i.e. what to do when you're in the "off" period of the PWM). One option is to let the current recirculate through the reverse-biased body diodes that are internally present in the FETs. Another option is to open the opposite pair of FETs and try to drive current in the opposite direction. a third option is to close the two bottom (or two top) FETs and keep the other two open - this allows the current to recirculate through ground (or vcc). You have to choose your preferred option and add the logic to make that happen. for more information, look up stepper motor "fast decay", "slow decay", "mixed decay" and also "synchronous rectification". some stepper driver IC's that have current regulation will explain that stuff in their datasheets, so they are a good source of info for that.
- another modification that is needed to Udi's schematic is hysteresis. the "off" current threshold and "on" current threshold should not be the same. this is quite easily done with some resistors around the comperator.
- of course, you also need to connect the other side of the h-bridge to the sense resistor (perhaps that was implied).
to summarize - my warm recommendation is not to get into this mess, and just get a ready-made stepper driver boards, or, at the very least, get ready-made stepper motor driver IC's with all the logic and current regulation etc (with either internal or external FETs).
Udi Finkelstein
some comments:
Jeremy, you do not want something which is diode-like, because it will waste humongous amounts of power. All the voltage that will not fall on the motor, will fall on that "edoid", i.e. 6 amps at 60-70 volts... you can see where it leads (to a lot of smoke, or at least huge power waste).
In contrast, Udi's solution, as well as commercial stepper motor drivers, work in switched mode operation. the "magic" of switched mode is that there is no theoretical limit to the efficiency - the closer your switching device is to an ideal switch (meaning no voltage drop and zero switching time), the closer to 100% efficiency you can get. A linear solution like such an "edoid" is, by definition, wasting all the excess input voltage as heat.
a few notes about Udi's solution:
- as Udi commented, simply cutting off the current to the motor is not necessarily the best thing to do. You have to provide some path for the current to recirculate. There are several common approaches to this (i.e. what to do when you're in the "off" period of the PWM). One option is to let the current recirculate through the reverse-biased body diodes that are internally present in the FETs. Another option is to open the opposite pair of FETs and try to drive current in the opposite direction. a third option is to close the two bottom (or two top) FETs and keep the other two open - this allows the current to recirculate through ground (or vcc). You have to choose your preferred option and add the logic to make that happen. for more information, look up stepper motor "fast decay", "slow decay", "mixed decay" and also "synchronous rectification". some stepper driver IC's that have current regulation will explain that stuff in their datasheets, so they are a good source of info for that.
- another modification that is needed to Udi's schematic is hysteresis. the "off" current threshold and "on" current threshold should not be the same. this is quite easily done with some resistors around the comperator.
The moment you cut off the motor => motor current drops down to zero => voltage across the sense resistor drops as well back to zero => comparator enabled again => motor back on => ad infinitum ...
The solution in other motor controllers is to shut it down for a few milllisecond and then try again. In the DRV8833 I have at home , they retry every 1.35ms.
- of course, you also need to connect the other side of the h-bridge to the sense resistor (perhaps that was implied).
to summarize - my warm recommendation is not to get into this mess, and just get a ready-made stepper driver boards, or, at the very least, get ready-made stepper motor driver IC's with all the logic and current regulation etc (with either internal or external FETs).
Guy Ovadia
jr
Ok the nmos current limit seems to work; Guy's objection noted namely it would be taking 6A*~70V=400W at worst. I was thinking of this as a failsafe since I don't necessarily trust the current limitation of the hbridge driver - but I guess if I just need a component that is going to go up in smoke (and i'm unlikely to thermally sink 400W) it may as well be a fuse instead of a nice mosfet.
green line is V2 ramping from 0-70Vdc, turquoise is volts on R1, and red is current thru load, limited to 6A (in sim anyway)

As for going with commercial hbridge - this is indeed what we're trying to implement (using the si9978).
BUT - in parallel we are 'fooling around' (ie learning as we go,hopefully not at expense of a ~100$ stepmotor) to try to get higher drive voltage of 80V instead of the 40V max of the si9978. If anybody has a link for an 80V dual (or even single) hbridge driver let 'er rip
open source motor control - http://www.robotpower.com/products/osmc_info.html
Will attempt to understand your ckts now....
Guy Ovadia
I have found I have two 48V, 7.5A DC power supplies. would they help with Stephanie? I didn't check if and how they are supposed to be paralleled (could be that they need some kind of connection for that), but I suspect it's possible. would 15A be enough current?
Guy.
jr
Guy Ovadia
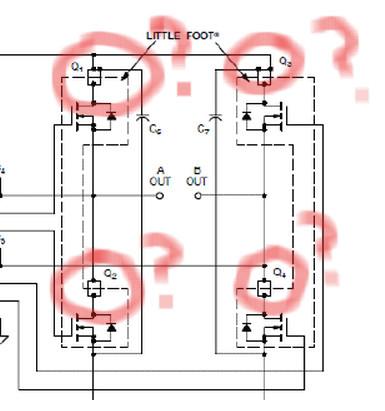
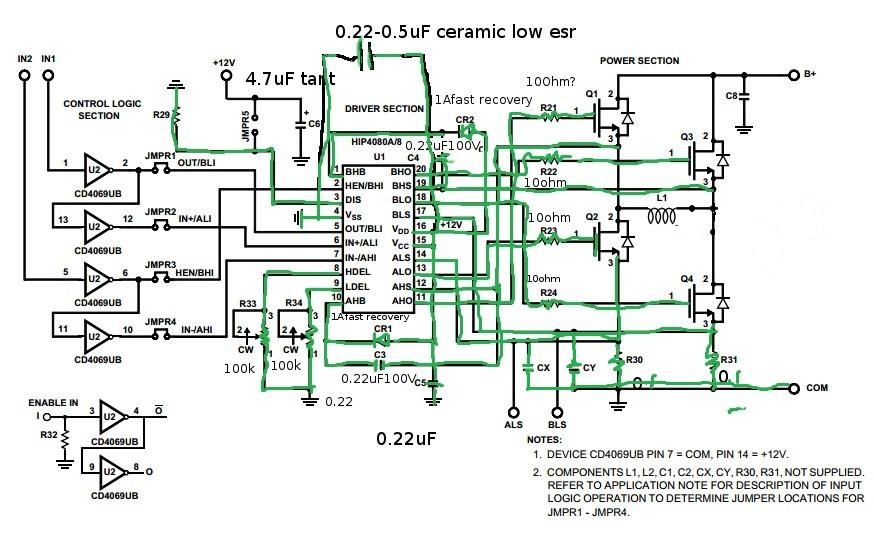
L1 and L2 are actual inductors, which are optional. A0 and B0 are the outputs of the H-bridge - connect these to one coil of a stepper motor. from the appnote:
"Finally, space has been provided for filter reactors, L1 and
L2, and filter capacitors, C1 and C2, to provide filtering of
PWM switching components from appearing at output
terminals AO and BO."
--
קיבלת הודעה זו מכיוון שאתה מנוי לקבוצה 'TAMI' בקבוצות Google.
כדי לבטל את המנוי לקבוצה הזו ולהפסיק לקבל ממנה הודעות דוא"ל, שלח הודעת דוא"ל אל hasadna+u...@googlegroups.com.
כדי לפרסם הודעות בקבוצה זו, שלח דוא"ל ל-has...@googlegroups.com.
לאפשרויות נוספות בקר ב-https://groups.google.com/groups/opt_out.
jr
jr
Yair Reshef
Yair Reshef
the ramps1.4 stepper shield uses the same driver
jr
From looking at the IB1010 inputs it seems the thing wants step and direction signals.

Guy Ovadia
--
archive and web access >https://groups.google.com/forum/#!forum/hasadna
---
קיבלת את ההודעה הזו מפני שאתה רשום לקבוצה 'TAMI' של קבוצות Google.
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה דוא"ל, שלח אימייל אל hasadna+u...@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
לאפשרויות נוספות, בקר ב-https://groups.google.com/d/optout.
jr
Yair Reshef
ronen eduBoard[1] is coming a long
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה אימייל, שלח אימייל אל hasadna+unsubscribe@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
jr
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה אימייל, שלח אימייל אל hasadna+u...@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
לאפשרויות נוספות, היכנס ל-https://groups.google.com/d/optout.
jr
I have the feeling there is some way to pull this off, can any one figure it out??

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Paul Cohen
Paul Cohen
Guy Ovadia
--
archive and web access >https://groups.google.com/forum/#!forum/hasadna
---
קיבלת את ההודעה הזו מפני שאתה רשום לקבוצה 'TAMI' של קבוצות Google.
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה אימייל, שלח אימייל אל hasadna+u...@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
כדי להציג את הדיון הזה באתר, היכנס ל-https://groups.google.com/d/msgid/hasadna/383b5cb8-0a8d-44e8-902f-f811e23d23df%40googlegroups.com.
jr
I
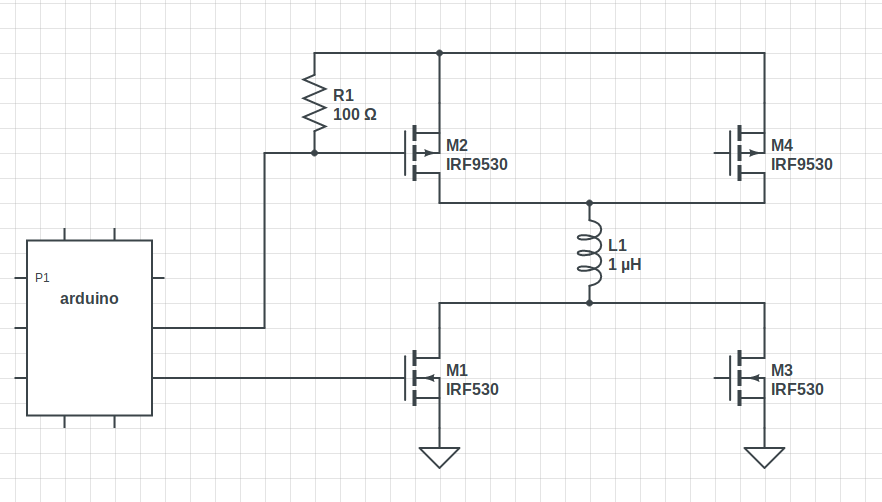
I think I have solved it, albeit without 3-state, fig below
I connect the gates of the pmos to the sources of the 'cooperating' nmos (the one that's 'on' when a given pmos is on)
Guy iiuc I should use as small as possible a resistance for the pullups , to prevent the phenom you speak of namely gate capacitance with pullup resistance
leading to a turn-on time constant that's an appreciable fraction of the pwm period
On Saturday, June 22, 2019 at 6:18:45 PM UTC+3, Guy Ovadia wrote:
One other consideration here - are you PWM'ing this at a high speed (kHz and above)? is so, a resistor is a poor choice for gate driving, because it turns on the transistor slowly. This is bad since a transistor only dissipates a small amount of power when it's fully open or fully closed, but a lot of power in the middle range (multiple orders of magnitude more, for many circuits). That's why you want to keep the time it gets turned on to be a very small fraction of the PWM cycle.
On Sat, 22 Jun 2019 at 17:38, Paul Cohen <paul...@gmail.com> wrote:
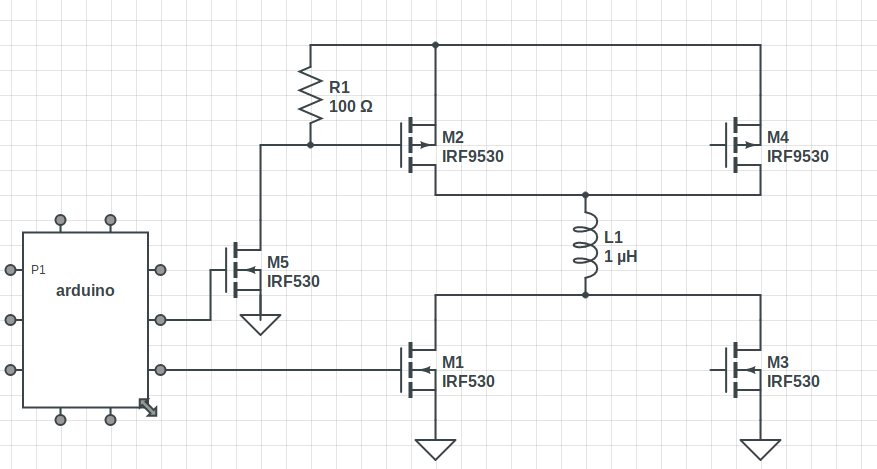
BTW, Why you use an IRF530 to drive the Power MOSFETS?--
On Monday, October 8, 2012 at 2:31:35 AM UTC+2, Guy Ovadia wrote:Hi,
I'm looking for a DC motor (H-bridge) driver board with the following specs:
- over 3A current (preferably 5A or more so it's not used at max capacity)
- over 24V voltage (again, 28V or more is better)
- looking for a ready to use board, as opposed to a bare chip
- fast availability is a plus (someone selling in Israel, or a fast shipment from abroad).
- I don't want undocumented "who knows what's that chip"-based boards, like the multiple offerings I found on eBay. I want good documentation.
recommendations?
thanks!
Guy.
archive and web access >https://groups.google.com/forum/#!forum/hasadna
---
קיבלת את ההודעה הזו מפני שאתה רשום לקבוצה 'TAMI' של קבוצות Google.
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה אימייל, שלח אימייל אל has...@googlegroups.com.
Paul Cohen
Guy Ovadia
Guy iiuc I should use as small as possible a resistance for the pullups , to prevent the phenom you speak of namely gate capacitance with pullup resistance
leading to a turn-on time constant that's an appreciable fraction of the pwm period
כדי לבטל את הרישום לקבוצה הזו ולהפסיק לקבל ממנה אימייל, שלח אימייל אל hasadna+u...@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
כדי להציג את הדיון הזה באתר, היכנס ל-https://groups.google.com/d/msgid/hasadna/d19aee15-9bff-4a85-981a-4f926a149755%40googlegroups.com.
Paul Cohen
קיבלת את ההודעה הזו מפני שאתה רשום לנושא בקבוצה 'TAMI' של קבוצות Google.
כדי לבטל את הרישום לנושא הזה, היכנס ל-https://groups.google.com/d/topic/hasadna/v5AukjqiyV0/unsubscribe.
כדי לבטל את הרישום לקבוצה הזו ולכל הנושאים שלה, שלח אימייל אל hasadna+u...@googlegroups.com.
כדי לפרסם בקבוצה הזו, שלח אימייל אל has...@googlegroups.com.
כדי להציג את הדיון הזה באתר, היכנס ל-https://groups.google.com/d/msgid/hasadna/CALkHusMNSJF_ZpuWZDyyjU1frQMn%3DBo59dik-ouCQyo1wFoGKw%40mail.gmail.com.
{kind=link}