Networking kinect 2 cameras (sensors not connecting)
151 views
Skip to first unread message

Matt Reed
Oct 26, 2022, 1:24:15 PM10/26/22
to Brekel
Hello all. I'm a newbie so please forgive my ignorance. I am trying to connect two Kinect 2 cameras but I'm having trouble. I've been trying for ages but I'm totally stumped, so here I am. Please help!
I've got two (capable) machines that are connected via a network switch and they seem to be communicating i.e. I can share files back and forth. Each machine has a Kinect 2 camera running on it. Both cameras are working fine on their respective computers.
One machine is in headless mode and the other is running the software normally as the GUI.
I have consulted the PDF manual and it says:
In the GUI select “Network” sensors and hit “Connect Sensors”.
• A broadcast signal will be sent out on your network (UDP port 9875)
The problem I have is that I have no option to connect sensors in the GUI. (on the right hand side under network it just says ignore (with a dropdown menu with primary and secondary) and below that it says record triggering. No option for connect sensors.
I am using POint Cloud v2 in trial mode (for now)
I'm really hoping someone can help. Thanks in advance

Brekel
Oct 28, 2022, 5:12:04 PM10/28/22
to Brekel
Hi,
The v2 (and v1) apps only support single sensor setups.
For multi-sensor setups you'll need PointCloud v3: https://brekel.com/brekel-pointcloud-v3
Greets,
Op woensdag 26 oktober 2022 om 19:24:15 UTC+2 schreef mattr...@gmail.com:
Matt Reed
Oct 31, 2022, 1:49:45 PM10/31/22
to Brekel
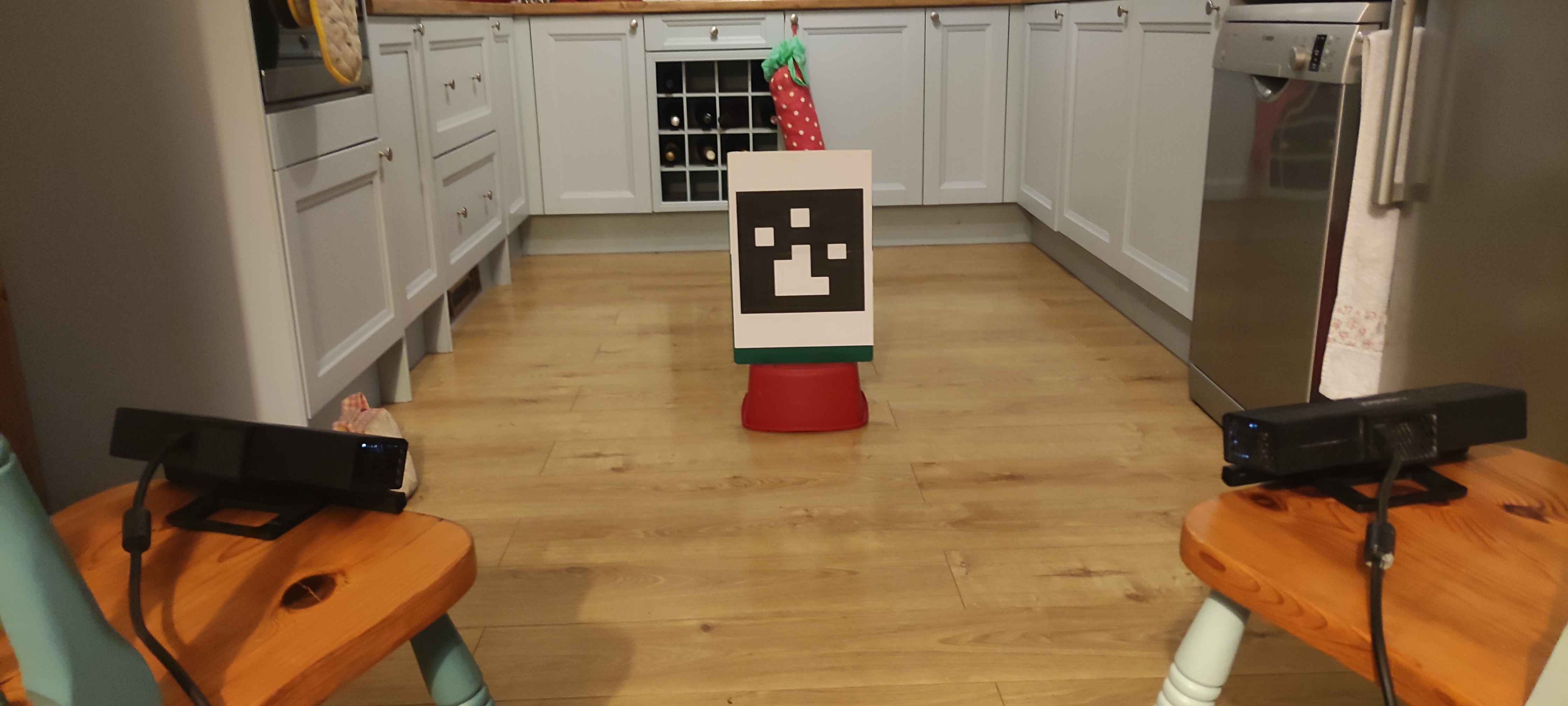
Hi there. Thanks so much for taking the time to reply. I've literally been trying for days to get this to work so I really appreciate the help. The good news is I'm now using PointCloud v3 and I have managed to network my two machines, so the two Kinect 2 sensors are being detected. The issue I am now having is with aligning the sensors. I am attaching a photo of how the cameras are set up in relation to the A3 static marker and I am also attaching a link to a video of my screen as I attempt to align the sensors. It's a little blurry but hopefully you can see enough to understand what it is I am doing wrong.
.
Once again, thanks for the help!
matt
.
{kind=link}
Brekel
Nov 1, 2022, 7:29:39 AM11/1/22
to Brekel
The white borders around your marker are very small which makes detection quite hard, it does seem to align on the few frames where both sensors detect the marker.
I would advice to put the marker on the floor so the coordinate system aligns with the floor in the Brekel app.
I would also advice to print it so there's a visible white border around the marker so the detector can more easily detect it.
Op maandag 31 oktober 2022 om 18:49:45 UTC+1 schreef mattr...@gmail.com:
Matt Reed
Nov 1, 2022, 3:08:07 PM11/1/22
to Brekel
Thank you! I'll give that a try
Matt Reed
Nov 7, 2022, 10:42:33 AM11/7/22
to Brekel
Hi there, hope you're well.
I'm still having trouble and would seriously appreciate some help. I've spent days trying too make this work and don't know what I am doing wrong.
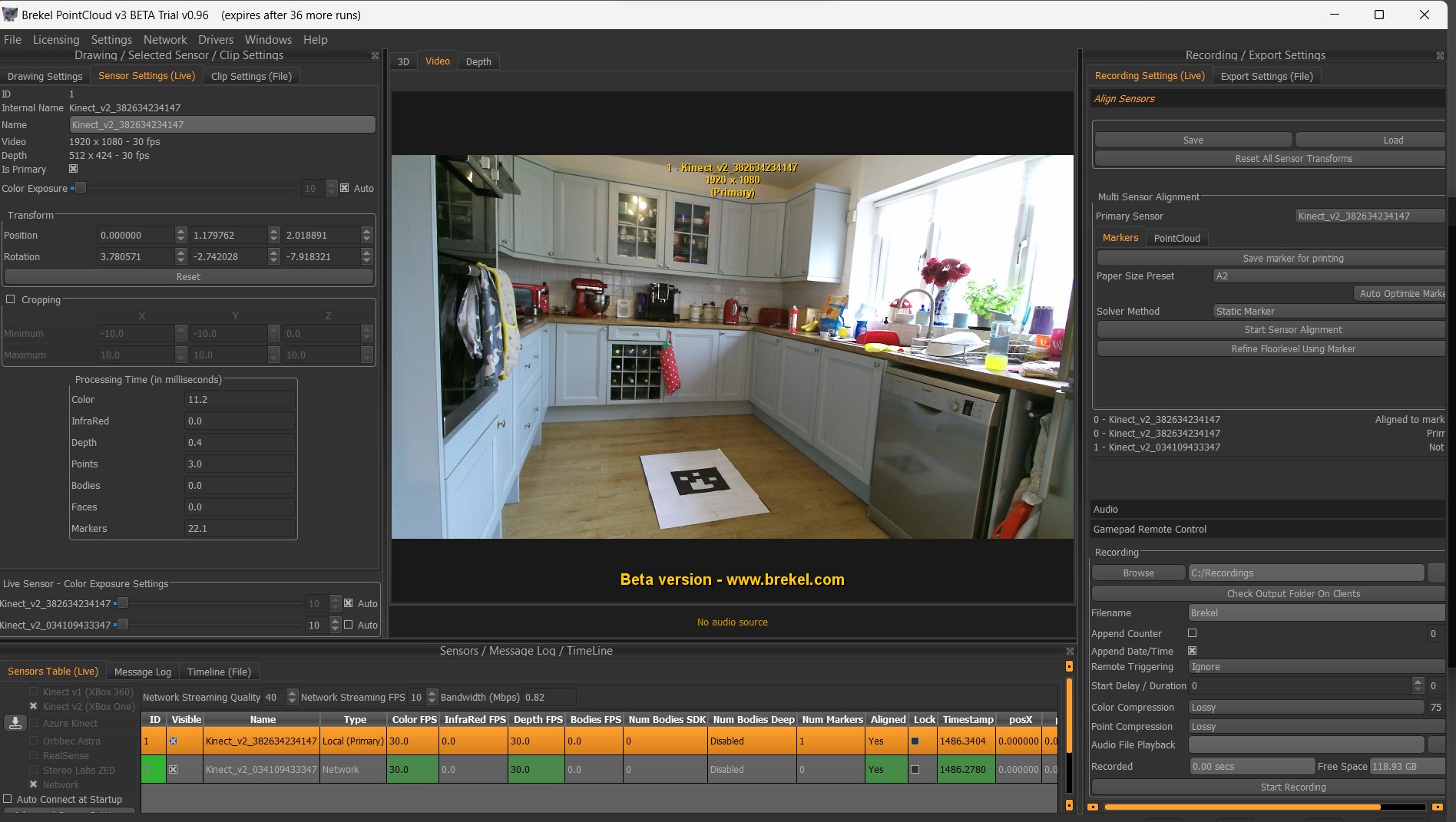
I am attaching a messge log, some screenshots and another video where I try to explain what I am doing. Hopefully you will be able to spot a solution.
Follwing your advice I have made the marker bigger with a wider white border.
I have tried to align the static marker to the two Kinect 2 cameras and it does show that both cameras are locked on to the marker but i can't get rid of the "not all sensors aligned yet" messsage which is driving me a bit nuts. The sensors table show that both cameras are supposedly aligned so I don't know what that means.
As i said in an earlier message I am an artist doing a masters in architectural and urban design at the university of brighton in the UK. I am trying to use multiple camera to make a 360 degree point cloud of myself that i can place into augmented reality. Here is something i acheived in Point Cloud V2
I have literally spent days trying to figure this out. Please help!!!!
I am willing to buy a full license but need to know that i can get this to work for what I need it to do, Assuming I can get the two kinect 2 cameras to work i will get a third camera to give a more complete scan. But I'm not at that stage yet!
Many thanks
Matt
{kind=link}
{kind=link}
Matt Reed
Nov 14, 2022, 8:08:58 AM11/14/22
to Brekel
Hi, Just wondering if you have had a chance to look at my issue? I'd really appreciate some help if possible. Thanks
Reply all
Reply to author
Forward
0 new messages