Inversor trifasico
111 views
Skip to first unread message

Gonzalo mac
Dec 15, 2011, 7:04:50 PM12/15/11
to vehiculos-...@googlegroups.com
Hola a todos,
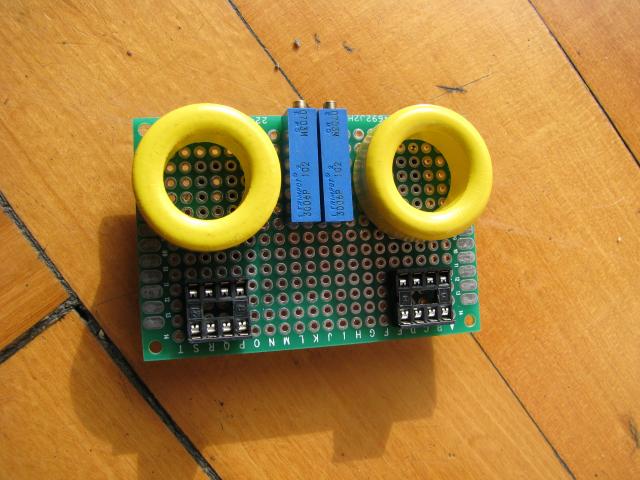
Les dejo unas fotos de como viene mi proyecto de inversor trifasico para controlar un motor de jaula de ardilla desde baterias. Por el momento, modifique la fuente para que me entregue casi 300v DC, le coloque el enconder optico de 1024ppr al motor y termine los sensores de corriente hall armados sobre toroides de ferrite. Ya probe el enconder con la placa y lo lee bien, este fin de semana probare los sensores de corriente de fase y con esto ya puedo hacer andar el motor con el software de control por vector. Luego del cuento como me fue. Saludos.

walter romero
Dec 16, 2011, 5:13:41 AM12/16/11
to vehiculos-...@googlegroups.com
Me parece un golazo ,te felicito.
--
Has recibido este mensaje porque estás suscrito al grupo "Vehículos eléctricos" de Grupos de Google.
Para ver este debate en la Web, visita https://groups.google.com/d/msg/vehiculos-electricos/-/bhu9qlI491QJ.
Para publicar una entrada en este grupo, envía un correo electrónico a vehiculos-...@googlegroups.com.
Para anular tu suscripción a este grupo, envía un correo electrónico a vehiculos-electr...@googlegroups.com
Para tener acceso a más opciones, visita el grupo en http://groups.google.com/group/vehiculos-electricos?hl=es.
Gonzalo mac
Mar 21, 2012, 1:32:17 PM3/21/12
to vehiculos-...@googlegroups.com
Sigo avanzando con el proyecto. Mientras me llegan unas partes para armar unos sensores hall para las corrientes de fase, recablee el motor poniendo las bobinas en paralelo, en lugar de serie, para bajar la tension del motor y subir la corriente. Pasaba que con los 260VDC que tengo disponibles, la corriente y torque del motor eran muy bajos. Al poner las bobinas en paralelo pase de tener 99ohms entre fase y neutro a 11ohms. Con este aumento de la corriente me da, por modulacion V/Hz, mucho mas rango aprovechable de RPM y se nota bastante en la practica, tiene mas fuerza y llega sin problemas.
Les dejo un video del banco de pruebas.

Rodrigo Reyes
Mar 21, 2012, 1:48:45 PM3/21/12
to vehiculos-...@googlegroups.com
Geniaaaaaaaal.
Muy groso lo q estas haciendo.
From: Gonzalo mac <poweredb...@gmail.com>
To: vehiculos-...@googlegroups.com
Sent: Wednesday, March 21, 2012 2:32 PM
Subject: Re: Inversor trifasico
--
Has recibido este mensaje porque estás suscrito al grupo "Vehículos eléctricos" de Grupos de Google.
Has recibido este mensaje porque estás suscrito al grupo "Vehículos eléctricos" de Grupos de Google.
Para ver este debate en la Web, visita https://groups.google.com/d/msg/vehiculos-electricos/-/LIuim69do3cJ.

Adrian Ramiro
Mar 21, 2012, 2:04:09 PM3/21/12
to vehiculos-...@googlegroups.com
Buen laburo, de que fuente obtenes los 260VDC? Me llama la atención el valor
--
Adrian
2012/3/21 Rodrigo Reyes <rodri...@yahoo.com>
Adrian
Gonzalo mac
Mar 21, 2012, 2:35:55 PM3/21/12
to vehiculos-...@googlegroups.com
Necesitaba que fuese aislado de la red, y lo que tenia a mano eran dos transformadores de 220a24 vac. Los puse con los bobinados de 24 enfrentados, de modo que a la salida tuviera 220vac aislados, luego rectifique y filtre con un banco de capacitores de fuente de PC.
Uno de los trasformadores tiene varios puntos de salida, no recuerdo ahora en cual lo conecte pero me dio esa tension en continua que es similar a lo que el dia de mañana podria tener con un banco de 20 baterias.
Si tendria que agregarle mas capacitores porque el ripple que debe ser asqueroso.
walter romero
Mar 21, 2012, 7:01:04 PM3/21/12
to vehiculos-...@googlegroups.com
Dos preguntas que me surgen,
cuando hablas de la reconexion del motor "en paralelo" te referis a que antes estaban en estrella para trabajar en 380 y ahora la pusiste en triangulo para trabajar en trifasica 3x220.De ser asi podrias tomar el 220 de la red rectificarlo y ponerle un buen capacitor y tenes 310vdc de donde colgar los igbt
La placa de microchip ya viene programada para control v/f,solo le tenes que programar las rampas o vos le hiciste el soft para el control,cuanto te costo(bueno fueron mas de dos preguntas espero que sea por el mismo precio jajaja)
cuando hablas de la reconexion del motor "en paralelo" te referis a que antes estaban en estrella para trabajar en 380 y ahora la pusiste en triangulo para trabajar en trifasica 3x220.De ser asi podrias tomar el 220 de la red rectificarlo y ponerle un buen capacitor y tenes 310vdc de donde colgar los igbt
La placa de microchip ya viene programada para control v/f,solo le tenes que programar las rampas o vos le hiciste el soft para el control,cuanto te costo(bueno fueron mas de dos preguntas espero que sea por el mismo precio jajaja)
Gonzalo mac
Mar 22, 2012, 12:21:58 AM3/22/12
to vehiculos-...@googlegroups.com
No,. el motor estaba en estrella y lo deje asi.
Es de 6 polos. Ahora nose porque le llaman asi si en realidad tiene 9 polos,. anyway
36 ranuras, paso de bobinas 1/6.
entonces las 3 bobinas de cada fase estaban conectadas en serie. Las desconecte y las conecte en paralelo.
Aca esta la explicacion mas en detalle:
Y va una foto de mi motor.
El problema de los 220 rectificados es que los necesito aislados porque el negativo del puente de IGBT lo tengo a masa de las otras fuentes, y cualquier pico de linea que se desvie de tierra me vuela los IR2110. Ya me paso dos veces. De esta forma, con doble transformador de aislacion me aseguro que esa tension es flotante y la puedo conectar donde necesite sin preocuparme.
Para el alcance de este prototipo, que es jugar con el software y adaptarlo para una aplicacion de vehiculo electrico, es suficiente.
La placa de microchip viene con un software precargado bien basico v/f y con varios modos para ACIM y tambien la BLDC y BDC. Pero esta tambien la "AN908 - ACIM Vector Control", ya mas avanzado, con field oriented control y field weakening, que es sobre el cual estoy trabajando. Por ahora a lazo abierto y cuando termine los sensores de corriente de fase, empezare a lazo cerrado. Que por las pruebas que hice hasta ahora se lo ve muy complicado, porque cualquier error/ruido en la lectura de las corrientes de fase, hace que mande cualquier verdura a los PWM y que el motor ande a los saltos, de forma inestable y consuma mucha corriente.
Saludos,
{kind=link}
walter romero
Mar 22, 2012, 5:56:10 AM3/22/12
to vehiculos-...@googlegroups.com
Los ir2110 son bastante jodidos con corrientes parasitas y otras yerbas,hay una aplicacion de microchip donde te dan una especie de circuito impreso "ideal" para estos bichos,por otra parte en muchos inverters vi que el disparo lo hacen con un opto que se llama pc923 de sharp que es especifico para esta funcion,claro que te tenes que tomar el trabajo de hacer una fuente para cada canal alto y una para los bajos de 15+15,si estas en argentina y te queres gastar unos pesos en gm electronica esta tambien el tlp250 que es para lo mismo.Me falto saber donde compraste la placa de microchip y cuanto te salio.Saludos
Gonzalo mac
Mar 22, 2012, 8:44:50 AM3/22/12
to vehiculos-...@googlegroups.com
La placa la compre a 1200 pesos, hace una par de años ya, en mcelectronics. Me la trajeron a pedido. Estuvo en la repisa juntando polvo, hasta recien mitad del año pasado que me puse con el proyecto.
Ahora no tengo problemas con el disparo. Hasta donde pude ver (aun me falta hacer mas pruebas, con plena carga y demas) tengo una señal limpia y bien cuadrada. El circuito lo copie de del modulo de potencia que microchip ofrece para esta placa, el "dsPICDEM MC1H 3-Phase HV Power Module". Uso una fuente independiente para el disparo de 16v. El mayor problema que tengo ahora es lograr una medicion clara de dos de las corrientes de fase. Ni con el osciloscopio, usando un transformador de desacople tipo bobina de rogowski, puedo obtener una señal buena. Esta llena de ruidos de disparo y poco logro dislumbrar de la señal senoidal de corriente que deberia estar ahi.
Ahora estoy armado unos sensores hall para medirlas. Usando dos UGN3503 enfrentados e intercalados en una ranura de un toroide de ferrite, la señal de estos la voy a amplificar con operacionales de instrumentacion INA122. Veremos como me va, sino les pedire ayuda para diseñar algun tipo de filtro
Saludos,
{kind=link}
walter romero
Mar 22, 2012, 6:14:46 PM3/22/12
to vehiculos-...@googlegroups.com
En youtube hay una nota de microchip que la podes buscar como brushless control motor circuit o algo asi ,son 3 o 4 videos explicativos con un pic de la serie 18f para comandar un motor y tambien esta la explicacion de como sensarla,si mi memoria no me falla ahi podes tener la solucion.Saludos
Reply all
Reply to author
Forward
0 new messages