New board: Sparky

peabody124

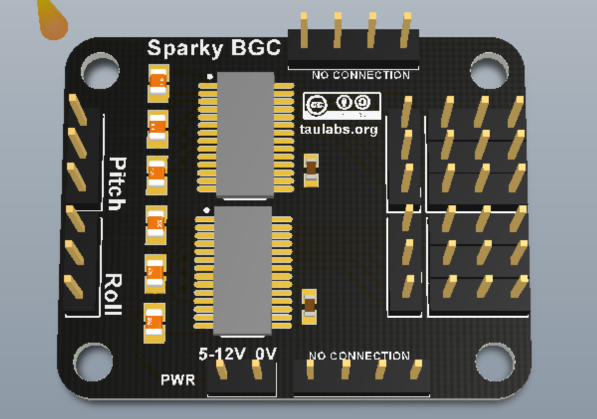
So you can see the brushless drivers (Sparky BGC) can piggy-back on the front or back of Sparky or even be cabled off separately. It will use CAN to talk to the main flight controller (e.g. another Sparky, Freedom or any other board with a CAN transceiver) to get control signals. Another Sparky board can also be populated with an MPU3300 and put on the CAN bus to provide an extremely low drift gimbal under strong accelerations. If that works well it will be easy to extend Sparky and add that to the main board.
Things I'm conflicted about:
1) Size. It could be made smaller, especially by losing the mounting holes (or two of them). However I'm thinking to use as a gimbal controller it will be nice to really bolt it onto the gimbal well. Kenn has also written some vibration analysis software that will be able to run on this to help make sure the gimbal is vibration is clean so you actually wouldn't want to use sticky tape in this case. Also it's about 300 mil more narrow than the standard footprint - I'm almost wondering if that is worth changing the mounting pattern for. Possibly I'll just extend the board one way to the standard size with nothing there and it can be cut off ?
2) MS5611. It's tempting to just add this for indoor altitude hold. This ties into size - with the current size I can probably squeeze it in and if desired this board can do navigation. *shrugs*

ala42
peabody124
ala42

Kenn Sebesta
peabody124
ala42
peabody124
peabody124

In the end I said screw it and traded a mounting hole for an MS5611. It's going to be nice to have a dirty cheap board that can do altitude hold and RTH while flying as well as CC3D. Not to mention single sided so easy as hell for hand assembly :)

AlPackin
peabody124
ala42
peabody124
Kenn Sebesta
peabody124

msev

Y Jung
msev
ala42
peabody124
AlPackin
msev
Dne petek, 19. april 2013 19:40:04 UTC+2 je oseba AlPackin napisala:
peabody124

Reddog
One thing I saw you mention was the antenna tracker on the ground. I too looked into using a brushless motor gimbal for antenna tracking and they don't have enough torque for it.
If you did decide to build an antenna tracker using Tau Labs boards I would really love to be involved if you could handle explaining some possibly mundane things. I am immensely interested in getting involved with coding on Tau Labs hardware.

Menno
peabody124
Menno

José Eduardo S. C. Xavier
--
You received this message because you are subscribed to the Google Groups "phoenixpilot" group.
To unsubscribe from this group and stop receiving emails from it, send an email to phoenixpilot...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.
peabody124
Reddog
peabody124
peabody124
AlPackin
peabody124
Reddog
On Friday, February 1, 2013 7:38:24 AM UTC+10, peabody124 wrote:
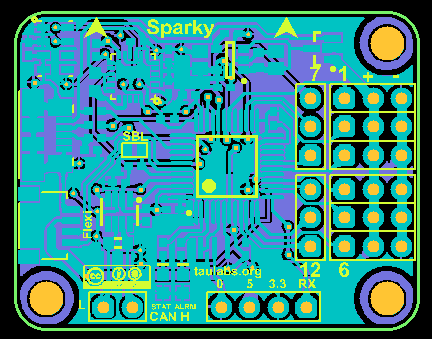
So while I was waiting for the freedom parts and pcbs (see previous post, flying now) I was goofing around with a new board(s) design. I've only put about 6 hours into this so it might be a bit rough still.Here were the goals:1) serve in three roles: standard flight controller, gimbal controller (ideally talking to the main FC), and brushless gimbal controller. Partly I just wanted a really cheap but well performing flight controller for my many quads.2) Single sided for components. Makes it nice and dead easy for hand assembly and can be sticky taped to frame.3) two layered - keep it cheap for small quantities4) CAN connectivity5) Make the brushless driver modular6) Use 9150 to provide mag information when used as a compass7) Since I want it to drive a dual axis BGC it's got 12 channels output :) Great for octo + gimbal in a standard configuration.
So you can see the brushless drivers (Sparky BGC) can piggy-back on the front or back of Sparky or even be cabled off separately. It will use CAN to talk to the main flight controller (e.g. another Sparky, Freedom or any other board with a CAN transceiver) to get control signals. Another Sparky board can also be populated with an MPU3300 and put on the CAN bus to provide an extremely low drift gimbal under strong accelerations. If that works well it will be easy to extend Sparky and add that to the main board.
Things I'm conflicted about:
1) Size. It could be made smaller, especially by losing the mounting holes (or two of them). However I'm thinking to use as a gimbal controller it will be nice to really bolt it onto the gimbal well. Kenn has also written some vibration analysis software that will be able to run on this to help make sure the gimbal is vibration is clean so you actually wouldn't want to use sticky tape in this case. Also it's about 300 mil more narrow than the standard footprint - I'm almost wondering if that is worth changing the mounting pattern for. Possibly I'll just extend the board one way to the standard size with nothing there and it can be cut off ?
2) MS5611. It's tempting to just add this for indoor altitude hold. This ties into size - with the current size I can probably squeeze it in and if desired this board can do navigation. *shrugs*
Right now for single quantities the BOM (with MPU9150) is ~30$ so it's going pretty well as a cheap capable FC. This is just something I'm goofing around with and i'll probably get 10 cheap PCBs made if anyone else were interested in populating their own.Schematic: https://dl.dropbox.com/u/6645063/Sparky.pdf - I still need to closely read the F3 datasheet so please point out if I made any goofs.

Alex
peabody124
José Eduardo S. C. Xavier
peabody124
José Eduardo S. C. Xavier
José Eduardo S. C. Xavier
peabody124
peabody124
José Eduardo S. C. Xavier
José Eduardo S. C. Xavier
José Eduardo S. C. Xavier
AlPackin
José Eduardo S. C. Xavier
--
AlPackin
peabody124
José Eduardo S. C. Xavier
peabody124
AlPackin
José Eduardo S. C. Xavier
AlPackin

JamesL
peabody124
peabody124

Jörg Rohde
I have to say I´m in Germany.
jörg
peabody124
José Eduardo S. C. Xavier
--
JamesL

pug398
On Thursday, January 31, 2013 4:38:24 PM UTC-5, peabody124 wrote:
So while I was waiting for the freedom parts and pcbs (see previous post, flying now) I was goofing around with a new board(s) design. I've only put about 6 hours into this so it might be a bit rough still.Here were the goals:1) serve in three roles: standard flight controller, gimbal controller (ideally talking to the main FC), and brushless gimbal controller. Partly I just wanted a really cheap but well performing flight controller for my many quads.2) Single sided for components. Makes it nice and dead easy for hand assembly and can be sticky taped to frame.3) two layered - keep it cheap for small quantities4) CAN connectivity5) Make the brushless driver modular6) Use 9150 to provide mag information when used as a compass7) Since I want it to drive a dual axis BGC it's got 12 channels output :) Great for octo + gimbal in a standard configuration.
So you can see the brushless drivers (Sparky BGC) can piggy-back on the front or back of Sparky or even be cabled off separately. It will use CAN to talk to the main flight controller (e.g. another Sparky, Freedom or any other board with a CAN transceiver) to get control signals. Another Sparky board can also be populated with an MPU3300 and put on the CAN bus to provide an extremely low drift gimbal under strong accelerations. If that works well it will be easy to extend Sparky and add that to the main board.
Things I'm conflicted about:
1) Size. It could be made smaller, especially by losing the mounting holes (or two of them). However I'm thinking to use as a gimbal controller it will be nice to really bolt it onto the gimbal well. Kenn has also written some vibration analysis software that will be able to run on this to help make sure the gimbal is vibration is clean so you actually wouldn't want to use sticky tape in this case. Also it's about 300 mil more narrow than the standard footprint - I'm almost wondering if that is worth changing the mounting pattern for. Possibly I'll just extend the board one way to the standard size with nothing there and it can be cut off ?
2) MS5611. It's tempting to just add this for indoor altitude hold. This ties into size - with the current size I can probably squeeze it in and if desired this board can do navigation. *shrugs*
Right now for single quantities the BOM (with MPU9150) is ~30$ so it's going pretty well as a cheap capable FC. This is just something I'm goofing around with and i'll probably get 10 cheap PCBs made if anyone else were interested in populating their own.
peabody124
pug398
peabody124
José Eduardo S. C. Xavier
--
JamesL
peabody124
peabody124
JamesL
Alex
peabody124

ethaller
Would it be possible to get the Sparky design- files (is it designed with Altium?) as a starting point for own board development?

F1Driver
peabody124
AlPackin also got it flying tuned up and doing position hold yesterday https://groups.google.com/d/msg/phoenixpilot/nE9H-naLfUc/NnVer0GIw7AJ

rip
peabody124
JamesL
peabody124
JamesL
peabody124
JamesL
peabody124
JamesL
JamesL
On Friday, June 7, 2013 1:50:54 PM UTC-5, peabody124 wrote: