Telemetry / Antenna Tracking Board with Ethernet Capability

Arthur Benemann
I'm developing a Telemetry board, to be used in conjunction with Mission Planner or my android GCS app (DroidPlanner, but i think Andropilot will run without a problem).
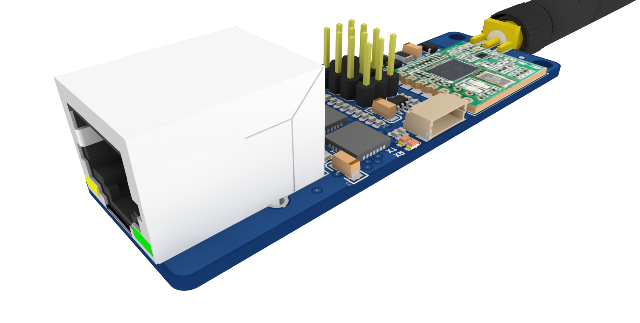
It's just a HopeRF's HM-TRP radio (the same module used in 3D robotics telemetry modules), an uC, an Ethernet controller and servo outputs (for an antenna tracker). The Ethernet connectivity option is great since multiple devices can be used to control the drone, like an android device and a PC. The whole system can communicate trough WiFi to multiple devices if you attach a cheap WiFi router to this board. Here is a 3D render of the board:

I think it would make a great addiction to the USB and air modules already avaliabe. I think a BOM cost of $10 is possible (excluding the RF module and SMA connector, which i don't know the price). The features I'm thinking to add are:
- Serial To TCP bridge
- Serial To UDP bridge
- Antenna Tracking - Via two servo outputs
- Battery Voltage Sensing - Since this will probably be connected to a Lead Acid battery for field operations.

Craig Elder
--
You received this message because you are subscribed to the Google Groups "drones-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to drones-discus...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.

Kevin Hester
Arthur Benemann
Looks awesome Arthur! Are you going to do a small build, if so could I send you some money to get one?
I'll happily add andropilot support.

Michael Oborne
Arthur Benemann
Just a couple of questions
how does the user set an ip on it?
does is support dhcp?i believe many users are not advanced enough to go changing these settings, both hardware and pc side.
Arthur Benemann
Arthur Benemann

Arthur Benemann

Robert Lefebvre
Robert Lefebvre
Arthur, this is great - is there any chance you could upload a pdf of the layout - I dont have eagle at the moment.I'll take this opportunity to make a shout for ardu-imu (or similar) support for compass / attitude compensation to provide a real 'plug and go' solution again :)
Arthur Benemann
Arthur, this is great - is there any chance you could upload a pdf of the layout - I dont have eagle at the moment.
I'll take this opportunity to make a shout for ardu-imu (or similar) support for compass / attitude compensation to provide a real 'plug and go' solution again :)
Robert Lefebvre
The basic update of the Ardutracker code is working fully - I've put a cleaned up version on dropbox that is good to go (57600 baud, Pan and Tilt on RC 8 & 7 respectively).I'm looking get the other version with full (dynamic?) tracking, finished, tested and documented within the next 3 weeks. I've got a hellish workload on at the moment, and I currently have to do this in my spare time, though after then will have full day a week on this stuff :)
Arthur Benemann
I think I've missed the plan here a little bit. But if at the end of the day, I could end up with a completely wireless antenna tracker, that would be awesome.
I could put the antenna out in a good spot .... or in a vehicle, etc
Robert Lefebvre
--
Arthur Benemann
I'm installing eagle now, in the past I've always used NI Circuit Design Suite but it's horrifically expensive and overkill for most apps.
Though it would be great to have orientation control onboard for cost and simplicity; I think it should ideally be a separate module - this would allow much more flexibility during installs where magnetic interference and weird tracker designs may cause issues (e.g. mounted on the roof of a car)
Would it be possible to get my hands on one of these boards when you get a run made?

Pete Birley
Arthur Benemann
That's sort of along the lines of what I'm thinking. Put some kind of IMU, a GPS and mag on the tracker, and then just walk it out and set it down with no calibration required. Is that what you're working towards?
- Code the TCP-Serial Bridge - Done
- Test the bridge with a 3DR radio on the link - Just waiting for my order arrive
- Build the hardware for an antenna tracker.
- Implement a poor man tracker (no GPS, no Mag) - Will work with Mission Planner (or the GCS app I'm developing (DroidPlanner)). The tracker coordinates is set in MP, or with the help of an Android device (which has GPS, and sometimes a mag).
- Improve the tracker by using a GPS and a magnetometer - This would require no user intervention, except on the first setup to calibrate the range and trim the pan/tilt axis.
I'm not sure the servo system could handle the wind load of being vehicle mounted. That would be pretty strong.
Pete Birley
I'm not sure the servo system could handle the wind load of being vehicle mounted. That would be pretty strong.Since I'm a E.E. I normally forget about the hard part, the hardware. But that is just a question of getting a big enough servo.
Arthur Benemann
That sounds like a great addition: forgive me, but does the magnetometer also have the ability to find the attitude of the tracker body? This is the solution I'm really interested in having: it would allow the tracker to be used in all sorts of additional environments: eg. boats, off-road vehicles, backpack mounted systems, lazy setups etc.
Pete Birley
Robert Lefebvre
--
Pete Birley
Arthur Benemann
Going with the ArduIMU would be easiest initially I think, though it is a bit more expensive, as it would require only a few lines to get a full ARHS from it (including gps). I can't see the picture you've posted of the breadboard setup you have for some reason,
but I'll try and get a replica knocked up in a week or so to play around with.