There should be provision in the options.h file, for the user to enter LOITER_RADIUS, as desired
36 views
Skip to first unread message

Rana
May 6, 2012, 4:13:20 AM5/6/12
to uavdevboard
Hi team !
There should be provision in the options.h file, for the user to enter
LOITER_RADIUS, as desired by user.
Regards
Rana
There should be provision in the options.h file, for the user to enter
LOITER_RADIUS, as desired by user.
Regards
Rana

crashmatt
May 6, 2012, 12:11:48 PM5/6/12
to uavde...@googlegroups.com
Better still, it could be added as a mavlink parameter so that you can re-configure it while at the flying site and store it in nv memory. This is fairly easy.
Fortunately for you, this is on my list of things to do, including improving how loitering works. Loitering control is a bit unpredictable right now.
Not sure how long it will take to get around to this. I need to finished work on airspeed control first. There may also need to be some improvements on turn control since there is no point having radius control if it can't stick to the radius.
Regards Matt

Riccardo Kuebler
May 6, 2012, 12:26:57 PM5/6/12
to uavde...@googlegroups.com
Matt,
btw there is LOGO programming that allows nice loitering.
I'm doing some test. Will probably publish something in short.
Best regards,
Ric
btw there is LOGO programming that allows nice loitering.
I'm doing some test. Will probably publish something in short.
Best regards,
Ric
2012/5/6 crashmatt <uavfligh...@gmail.com>
crashmatt
May 6, 2012, 12:39:11 PM5/6/12
to uavde...@googlegroups.com
Ric,
On Sunday, May 6, 2012 6:26:57 PM UTC+2, Riccardo wrote:
Good point. I don't use logo since the predetermined patterns are no use to me (yet, but they will be).
Also, watch out for the LOGO and options.h airspeed. It sets desiredSpeed which is not airspeed. If ground speed is lower than airspeed then your aircraft will go faster.
The new airspeed_options.h with adds minimum groundspeed, minimum airspeed and maximum airspeed. The airspeed units are a bit messed up right now bu I will be changing that soon. I will fix it soon.
Regards Matt
On Sunday, May 6, 2012 6:26:57 PM UTC+2, Riccardo wrote:
Matt,
btw there is LOGO programming that allows nice loitering.
I'm doing some test. Will probably publish something in short.
Best regards,
Ric
2012/5/6 crashmatt
Better still, it could be added as a mavlink parameter so that you can re-configure it while at the flying site and store it in nv memory. This is fairly easy.
Rana
May 7, 2012, 3:21:04 AM5/7/12
to uavdevboard
Hi Matt !
Thanks for your comments and value addition.
I am really shocked to know that loitering control is a bit
unpredictable right now :(
Regards
Rana
Thanks for your comments and value addition.
I am really shocked to know that loitering control is a bit
unpredictable right now :(
Regards
Rana
Riccardo Kuebler
May 7, 2012, 6:41:11 AM5/7/12
to uavde...@googlegroups.com
Rana,
"unpredictable" has to be interpreted in the right way.
When a flag "loitering" has set on, the plane will reach this waypoint and Matrix Pilot repeats it infinitely.
It is very predictable. Upredictable is the way the plane will turn to return to the same waypoint : it depends on wind and side of approach. Usually the plane will turn on one side, either right or left, and continues to loiter in this way, unless there is a very strong wind or the plane / MatrixPilot are definitely bad tuned.
So it is predictable and very well working. I used it several times.
Best regards,
crashmatt
May 7, 2012, 10:46:10 AM5/7/12
to uavde...@googlegroups.com
The unpredictability is as Ric suggests. The loiter can turn left or right after approach from downwind. I need to tidy up this behaviour to keep the loiter in a better controlled area.
Some ideas on how to do this:
Regards Matt
1. Do not approach the waypoint directly, approach the closest loiter radius to the waypoint. This means that you always approach the loiter from the same side.
2. If it is windy, move the waypoint upwind so that the centre of loiter is where you want it to be, not downwind somewhere.
In wind the correct shape is a kind of D shape but not a 0 or a O.
Following thermal lift for glider pilots is then a case of letting the waypoint move downwind as the thermal floats downwind.
Rana
May 7, 2012, 12:14:50 PM5/7/12
to uavdevboard
Thanks Ric !
Regards
Rana
On May 7, 3:41 pm, Riccardo Kuebler <kueb...@ticino.com> wrote:
> Rana,
>
> "unpredictable" has to be interpreted in the right way.
> When a flag "loitering" has set on, the plane will reach this waypoint and
> Matrix Pilot repeats it infinitely.
> It is very predictable. Upredictable is the way the plane will turn to
> return to the same waypoint : it depends on wind and side of approach.
> Usually the plane will turn on one side, either right or left, and
> continues to loiter in this way, unless there is a very strong wind or the
> plane / MatrixPilot are definitely bad tuned.
>
> So it is predictable and very well working. I used it several times.
>
> Best regards,
>
> Ric
>
> 2012/5/7 Rana <narpat...@gmail.com>
Regards
Rana
On May 7, 3:41 pm, Riccardo Kuebler <kueb...@ticino.com> wrote:
> Rana,
>
> "unpredictable" has to be interpreted in the right way.
> When a flag "loitering" has set on, the plane will reach this waypoint and
> Matrix Pilot repeats it infinitely.
> It is very predictable. Upredictable is the way the plane will turn to
> return to the same waypoint : it depends on wind and side of approach.
> Usually the plane will turn on one side, either right or left, and
> continues to loiter in this way, unless there is a very strong wind or the
> plane / MatrixPilot are definitely bad tuned.
>
> So it is predictable and very well working. I used it several times.
>
> Best regards,
>
> Ric
>
Rana
May 7, 2012, 12:17:35 PM5/7/12
to uavdevboard
crashmatt
May 7, 2012, 12:20:27 PM5/7/12
to uavde...@googlegroups.com
Slight correction. From any given position, the distance to the two sides of the radius of a waypoint is always equal. I meant to mean the closest angle to the radius of the waypoint is the one that should be flown to.
There also needs to be some logic that prevents hunting between the two different sides of the radius.
There is a drawing of it here:
Riccardo Kuebler
May 7, 2012, 12:40:31 PM5/7/12
to uavde...@googlegroups.com
Matt,
I can't watch at the drawing.
I would like to point that in a flight plan you always have a second-last waypoint and a last wayopint.
The plane goes then from second-last to last and when reaches (and exceeds) the last wp, this one will be repeated.
I can only see a couple of way to force a turn now (btw I like these challenges) :
- having an approach from side wind (e.g. with wind on left side) the plane will probably, with high probabilities, start to loiter to the left,
- setting a couple of close wp in a turn pattern and the plane will probably here too start to loiter in the same direction
- using LOGO !
Anyway the side of loitering could change during the loitering itself, it depends how the WP is triggered.
As a last note remember that the loiter function only applies to the last wp. MatrixPilot never comes out from a loiter wp.
The way I force loiter with the Proxima II is a LOGO tight turn, programmed as rtl flight plan, which I trigger with a switch.
I can park the plane where I want in the sky. The plane only turns on the side I programmed (left now).
Unfortunately I can't program a second turn to the right, because I want to keep autonomous mode with return to home for safety reasons.
Best regards,
crashmatt
May 7, 2012, 1:42:09 PM5/7/12
to uavde...@googlegroups.com
Rana,
Ric is correct in recommending LOGO. It is the right thing to use for your needs. It is most likely to work beautifully.
Ric,
The drawing was not too good so don't worry about it. This is a good challenge!
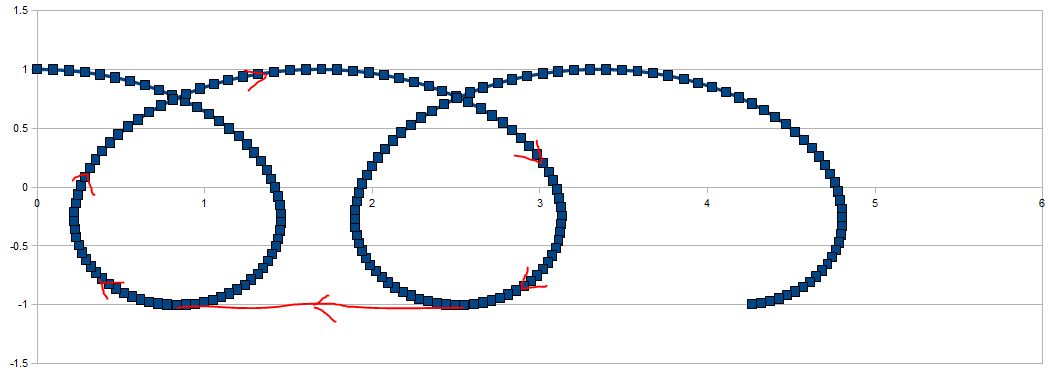
LOGO is great for making fixed plans of waypoints. I would like variable shapes. The loitering shape changes depending on radius (airspeed, thermal type etc..), windspeed, wind direction and if you are circling a moving waypoint.
The result for on demand loitering is that the loiter centre is set wherever you entered loiter mode. It would then circle around that point according to airspeed and wind conditions.
If you are circling in wind you get the shape below. If you want to loiter a waypoint then you get the path shown by red arrows. The waypoint would be at ~1.5 on x axis.
On Monday, May 7, 2012 6:40:31 PM UTC+2, Riccardo wrote:
Matt,I can't watch at the drawing.I would like to point that in a flight plan you always have a second-last waypoint and a last wayopint.The plane goes then from second-last to last and when reaches (and exceeds) the last wp, this one will be repeated.I can only see a couple of way to force a turn now (btw I like these challenges) :- having an approach from side wind (e.g. with wind on left side) the plane will probably, with high probabilities, start to loiter to the left,- setting a couple of close wp in a turn pattern and the plane will probably here too start to loiter in the same direction- using LOGO !Anyway the side of loitering could change during the loitering itself, it depends how the WP is triggered.As a last note remember that the loiter function only applies to the last wp. MatrixPilot never comes out from a loiter wp.The way I force loiter with the Proxima II is a LOGO tight turn, programmed as rtl flight plan, which I trigger with a switch.I can park the plane where I want in the sky. The plane only turns on the side I programmed (left now).Unfortunately I can't program a second turn to the right, because I want to keep autonomous mode with return to home for safety reasons.Best regards,
Ric2012/5/7 crashmatt
Slight correction. From any given position, the distance to the two sides of the radius of a waypoint is always equal. I meant to mean the closest angle to the radius of the waypoint is the one that should be flown to.
Reply all
Reply to author
Forward
0 new messages