Yalmip for fitting polynomial
81 views
Skip to first unread message

Mohamed Soliman
Sep 15, 2021, 10:31:24 AM9/15/21
to YALMIP
Hello Johan
If I have a path that I generated from a planner and I want to fit this path with a polynomial and additionally I want this fitting to respect some constraints ( i will use also binary variable to express some constraints) how can Yalmip help me doing so.
BR
Mohamed

Johan Löfberg
Sep 15, 2021, 10:53:43 AM9/15/21
to YALMIP
Mohamed Soliman
Sep 15, 2021, 2:01:17 PM9/15/21
to YALMIP
Thanks a lot for your reply
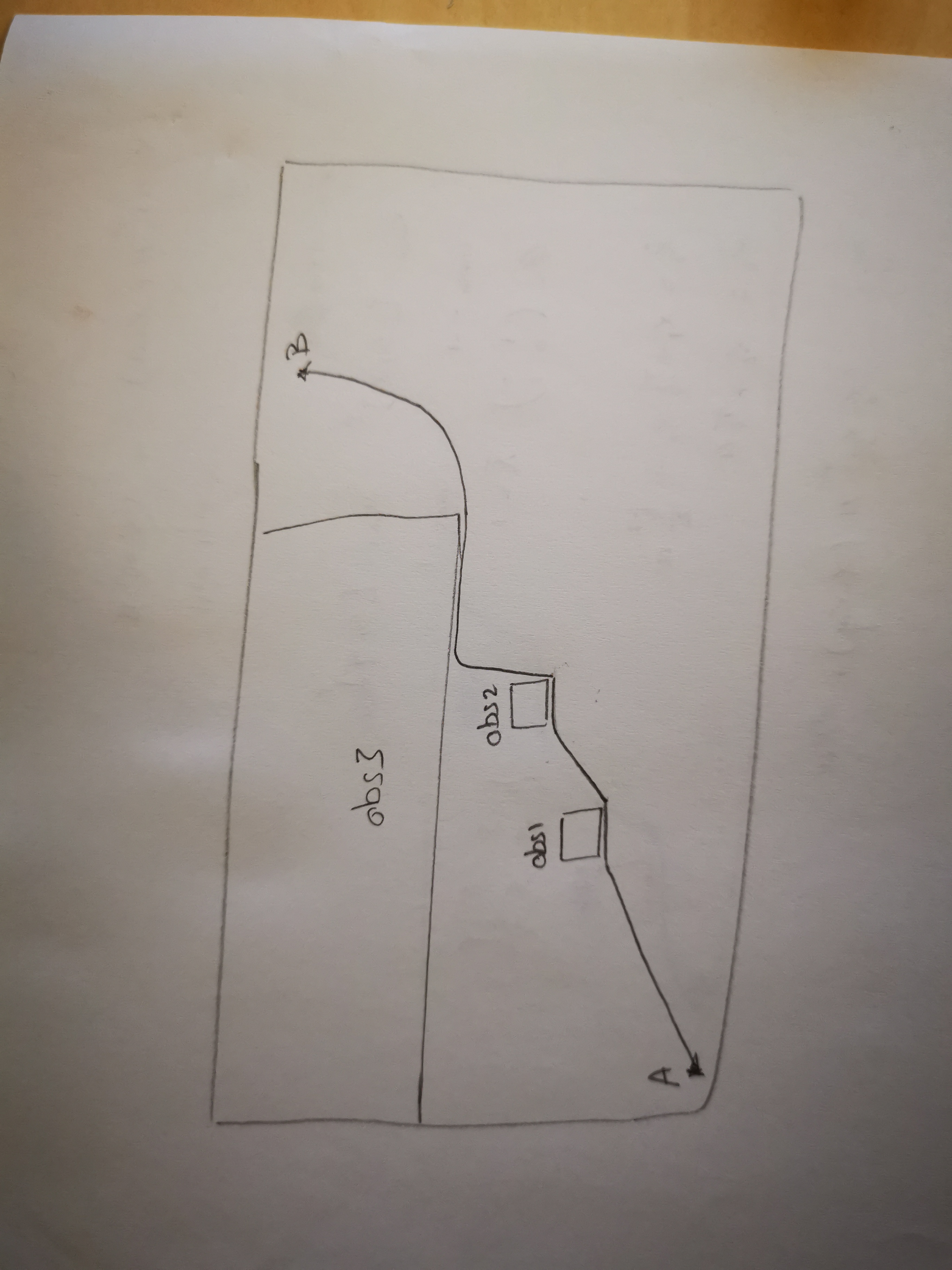
I am following the link that you sent, but I am still wondering how can I express the constraints in the fitting if I have for examples obstacles (kindly, see my attached figure) I can fit this path with an approximated 5 th order polynomial but of course this approximated path hit the constraints. I have uploaded the m.file surly there is something that I still miss understand
Again many thanks for your help and support
BR
Mohamed
{kind=link}
Johan Löfberg
Sep 15, 2021, 2:14:58 PM9/15/21
to YALMIP
unclear what you are doing.
you reference a data file which isn't attached.
you show a picture in 2D, but appear to have a polynomial in 1D.
you define x as a constant and then as an sdpvar immediately after
replace(p,x,x) makes no sense.
avoidance constraint of a box can never be one with a single linear inequality which you appear to have
Mohamed Soliman
Sep 15, 2021, 2:26:32 PM9/15/21
to YALMIP
Hello Johan
The reference data is attached
the picture is just to illustrate the problem ( this path is already planned and I want to find a polynomial that can approximately fit the path without hitting the obstacles)
I was trying to define the box with binary variable (maybe I am wrong)
All the best
Johan Löfberg
Sep 15, 2021, 2:36:28 PM9/15/21
to YALMIP
my other questions remain
E.g., to define an obstacle, you must somehow have the model to_the_left OR to_the_right OR above OR below. That cannot be the case with your current model. A big-M representation would require 4 linear equalities per box + 1 disjunction on the 4 binaries related to that box
Johan Löfberg
Sep 15, 2021, 2:41:50 PM9/15/21
to YALMIP
but better is that you use the built-in functions and simply use
norm(replace(x,t,t_i) - box_center,inf) >= box_size
I assume you have x as a 2d polynomial parameterized in a variable called t, sampled at instances t_i
Mohamed Soliman
Sep 16, 2021, 5:31:12 AM9/16/21
to YALMIP
Hello Johan,
I have updated the code :
- I have considered the box centers and box sizes
- x is given in line 10
The problem is given these data points (in line 10) I want to find a poly coefficients that yield y=f(x) such that when I plot x-y path , the resulting path does not hit with the boxes.
And again I am sorry if my question was not clear or if can not see what you are trying to explain I am still in my first steps using Yalmip
BR
Mohamed
Johan Löfberg
Sep 16, 2021, 5:54:46 AM9/16/21
to YALMIP
Code makes no sense
x=xhist(1,:);
x = sdpvar(1);
First line is redundant, as you overwrite that variable immediately
[p,a,v] = polynomial(x,6);
Why are you definig a scalar polynomial, when the path is in 2D? OK, I see you want y(x), but when moving in 2D, it is much much more natural to have {x(t),y(t)}. Otherwise it is impossible to go straight down (as your path appears to want to do), or move to the right and down and then turn around and go left and down
You define p but never use it
norm(replace(y,x,t_i) -
What is y, it is not defined. There is no variable called t_i either
Johan Löfberg
Sep 16, 2021, 6:06:33 AM9/16/21
to YALMIP
xdata = xhist(1,:);
ydata = xhist(2,:);
sdpvar t
[x,a] = polynomial(t,5);
[y,b] = polynomial(t,5);
objective = 0;
t_i = linspace(0,1,length(xdata));
X = [];
Y = [];
for i = 1:length(xdata)
x_i = replace(x,t,t_i(i));X = [X x_i];
y_i = replace(y,t,t_i(i));Y = [Y y_i];
objective = objective + (x_i-xdata(i))^2 + (y_i - ydata(i))^2;
end
Match = [X(1)==xdata(1),
X(end)==xdata(end),
Y(1)==ydata(1),
Y(end)==ydata(end)]
optimize(Match,objective);
plot(value(X),value(Y))
hold on
plot(xdata,ydata)
torsdag 16 september 2021 kl. 11:31:12 UTC+2 skrev mosoli...@gmail.com:
Johan Löfberg
Sep 16, 2021, 6:16:04 AM9/16/21
to YALMIP
load safe_path
xhist = xhist(:,1:10:end);
xdata = xhist(1,:);
ydata = xhist(2,:);
sdpvar t
[x,a] = polynomial(t,5);
[y,a] = polynomial(t,5);
objective = 0;
t_i = linspace(0,1,length(xdata));
X = [];
Y = [];
Avoid = [];
for i = 1:length(xdata)
x_i = replace(x,t,t_i(i));X = [X x_i];
y_i = replace(y,t,t_i(i));Y = [Y y_i];
objective = objective + (x_i-xdata(i))^2 + (y_i - ydata(i))^2;
Avoid = [Avoid, norm([x_i;y_i] - [50;50],inf) >= 20];
end
Match = [X(1)==xdata(1),
X(end)==xdata(end),
Y(1)==ydata(1),
Y(end)==ydata(end)];
optimize([Match,Avoid],objective);
plot(value(X),value(Y))
hold on
plot(xdata,ydata)
sdpvar z(2,1);
plot(norm(z-[50;50],inf)<=20)
torsdag 16 september 2021 kl. 11:31:12 UTC+2 skrev mosoli...@gmail.com:
Mohamed Soliman
Sep 16, 2021, 7:01:21 AM9/16/21
to YALMIP
Hi Johan
Thanks a lot for your help
BR
Mohamed
Mohamed Soliman
Sep 16, 2021, 8:44:55 AM9/16/21
to YALMIP
Hello Johan
One more question if you do not mind
I have added all constraints I have.
Now,If I want to enforce the function to be at a certain point near the big red box, I used for that( Y(55)==ydata(55) in the line in 34 but the problem does not converge
Johan Löfberg
Sep 16, 2021, 10:14:18 AM9/16/21
to YALMIP
https://yalmip.github.io/slowmilp
However, I am not sure adding such a constraint makes sense. If you for instance solve the problem and replace the objective with abs(Y(55)-ydata(55)) it will return a solution which satifies this, but as you will see, the path is completely arbitrary, in other words "y at index 55" has no meaning really once you are parameterized in the path variable. Sure you are using the path deviation in objective which sort of keeps you connected to the initial parameterization but vague. In other words, if it is important that the solution passes close to (xdata(55)-ydata(55)) you will have to model when x close to xdata(55) then y close to ydata(55) which I am not sure how it is done easily working in a path parameter. penalizing (X;Y)(55)-(xdata;ydata)(55) strongly is one hack
Mohamed Soliman
Sep 16, 2021, 1:35:49 PM9/16/21
to YALMIP
Should the objective of minimizing the difference between data points and x_i yield a function that is somehow near the original data,i.e. the fitted data should be near to big box?
even by giving more weights, this does not help
Johan Löfberg
Sep 16, 2021, 3:50:24 PM9/16/21
to YALMIP
That code does not even run
Scaling the objective with 1000 (or what ever) makes absolutely no difference
Polynomials are simply bad interpolants
0 new messages