Installing rtl-sdr and rtl-433 on Raspberry Pi
1,720 views
Skip to first unread message

Gert Andersen
Dec 12, 2019, 5:48:22 AM12/12/19
to weewx-user
Hi
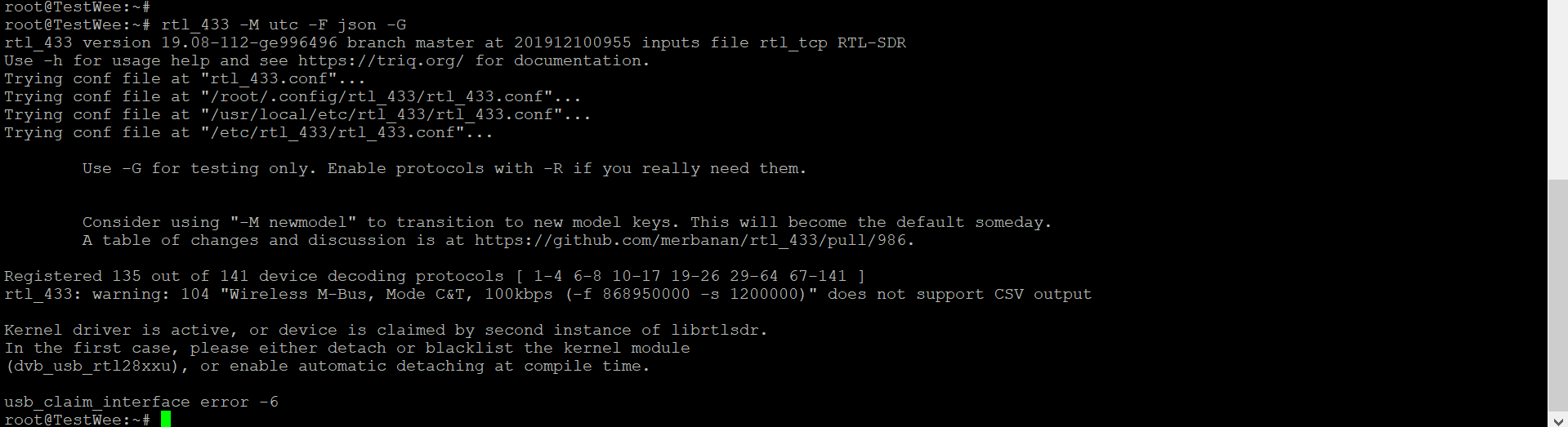
I'm new to WeeWx and I'm trying to install the SDR software. I have followed this guide https://github.com/weewx/weewx/wiki/sdr-rpi-recipe. I get an error as You can see on the screenshot.
It is the first time I'm using the SDR software, so I really don't know where to look.
Any ideas and thanks for your help?
Rgds
Gert

steeple ian
Dec 12, 2019, 6:34:56 AM12/12/19
to weewx...@googlegroups.com
Hi Gert,
Have you tried to blacklist? See the trouble shooting section at the end of the recipe instructions.
Ian
--
You received this message because you are subscribed to the Google Groups "weewx-user" group.
To unsubscribe from this group and stop receiving emails from it, send an email to weewx-user+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/weewx-user/073287b4-9583-46b9-867f-3aa496ba38d2%40googlegroups.com.
Gert Andersen
Dec 12, 2019, 6:55:22 AM12/12/19
to weewx-user
Hi Ian
Thanks for the tip. I have overlooked that part.
Now I just need to shift the the right freq. I need 868 MHz instead of 433Mhz
Rgds
Gert
steeple ian
Dec 12, 2019, 7:04:18 AM12/12/19
to weewx...@googlegroups.com
driver = user.sdr
path = /usr/local/bin
cmd = rtl_433 -f 868M -s 1024k -M utc -F json -R 78
--
You received this message because you are subscribed to the Google Groups "weewx-user" group.
To unsubscribe from this group and stop receiving emails from it, send an email to weewx-user+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/weewx-user/29ea46ea-8060-4fdf-85b7-77bd1a76ae8e%40googlegroups.com.
steeple ian
Dec 12, 2019, 7:08:37 AM12/12/19
to weewx...@googlegroups.com
steeple ian
Dec 12, 2019, 7:11:10 AM12/12/19
to weewx...@googlegroups.com
Sensor map something like this:-
[[sensor_map]]
outTemp = temperature.71.FOWH65BPacket
windSpeed = wind_speed.71.FOWH65BPacket
UV = uv_index.71.FOWH65BPacket
light = light.71.FOWH65BPacket
outBatteryStatus = battery.71.FOWH65BPacket
outHumidity = humidity.71.FOWH65BPacket
windDir = wind_dir.71.FOWH65BPacket
windGust = wind_gust.71.FOWH65BPacket
rain_total = rain_total.71.FOWH65BPacket
inTemp = temperature.233.FOWH32BPacket
inHumidity = humidity.233.FOWH32BPacket
barometer = pressure.233.FOWH32BPacket
inTempBatteryStatus = battery.233.FOWH32BPacket
Then in calibrate section:-
[StdCalibrate]
[[Corrections]]
# For each type, an arbitrary calibration expression can be given.
# It should be in the units defined in the StdConvert section.
# Example:
foo = foo + 0.2
radiation = light * 0.007893 if light is not None else None
Gert Andersen
Dec 12, 2019, 7:18:05 AM12/12/19
to weewx-user
Hi Ian
Great, up and running with 868MHz.
Rgds
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
Gert Andersen
Dec 14, 2019, 1:46:14 PM12/14/19
to weewx-user
Hi
I have tried to find sensors with this command:
rtl_433 -f 868M -s 1024k -M utc -F json -R 78
But I don't find any sensors, just
pulse_FSK_detect(): Maximum number of pulses reached?
I have attached a screenshot.
Any ideas.
Rgds
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:

{kind=link}
{kind=link}
rich T
Dec 14, 2019, 2:25:37 PM12/14/19
to weewx-user
If you can moved the dongle to a windows machine and run SDRSharp or if you have GQRX installed on the RPI run that. Tune to the frequency and verify the strength of the signal. Just to make sure you are receiving a strong signal.
{kind=link}
Message has been deleted
rich T
Dec 14, 2019, 3:22:09 PM12/14/19
to weewx-user
Yes that is the software. Set the radio to NFM and start the radio. You should see the noise floor and the station when it transmits.
{kind=link}
rich T
Dec 14, 2019, 5:12:24 PM12/14/19
to weewx-user
Okay … Did you install the zadig driver?
{kind=link}
Message has been deleted
Message has been deleted
Gert Andersen
Dec 15, 2019, 11:36:12 AM12/15/19
to weewx-user
Hi
I think I have come a little bit closer. I can see the different sensors and I can see their mapping.
There are some things I can't figure out though. My reports do not show the data that the sensors show I and can't find pressure mapping. In addition, it is necessary to unplug the dongle and reinsert it, to make it work. About this Matthew writes:
"I have had problems running rtl-sdr on systems with libusb 1.0.11. The rtl_433 command craps out with a segmentation fault, and the rtl_test command sometimes leaves the dongle in a weird state that can be cleared only by unplugging then replugging the dongle .
Using a more recent version of libusb (e.g., 1.0.20) seems to clear things up. "
I don't know how to install a newer version.
Attached relevant screenshots.
Any help really appreciated
I do not know what to do without this group and the people who tried to help. Thank you.
Rgds
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
{kind=link}
{kind=link}
{kind=link}
rich T
Dec 15, 2019, 3:21:18 PM12/15/19
to weewx-user
For updating
sudo apt-get update
sudo apt-get upgrade
Your pressure comes from the console not the outdoor sensors.
On Sunday, December 15, 2019 at 11:36:12 AM UTC-5, Gert Andersen wrote:
Gert Andersen
Dec 16, 2019, 7:22:43 AM12/16/19
to weewx-user
Hi Again
After trying many different things, i found that if i run a usbreset every time i start up SDR, it seems to have helped.
Now I get data for the Standard reports, but Rain Rate and Daily Rain are wrong. Although it has not rained, I have a value for RR and DR.
I've attached rain-test-packets.log where I've run weewx manually. Until 12:26:37 DR shows 0.12, although it has not rained today. At 12:26:37 I poured water into the bucket, maybe 3 tips and DR went from 0.12 to 0.16.
The standard report shows DR 2026.2mm and RR 533. Although it still hasn't rained, the last report shows DR 2135.9mm and RR 373.9mm / h. When
If I run SDR via weewx, DR looks real, output.txt (rain_total.157.FOWH65BPacket': 4.064)
What have I missed, feeling I'm very close now.
Thanks for your support.
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
{kind=link}
{kind=link}
Gert Andersen
Dec 17, 2019, 10:53:38 AM12/17/19
to weewx-user
Hi
I have started to upload to a web server. The rain data still wrong and it seems to change all the time.
Website: http://vejret.lynghuzed.dk
Anything I can do?
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
{kind=link}
Gert Andersen
Dec 18, 2019, 5:32:32 AM12/18/19
to weewx-user
Hi
I forgot to mention that I also have a Ecowitt GW-1000 uploading to ecowiit.net and it seems to upload the data fine, also the rain data.
Gert
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
On Thursday, December 12, 2019 at 11:48:22 AM UTC+1, Gert Andersen wrote:
{kind=link}
mwall
Dec 22, 2019, 9:06:42 PM12/22/19
to weewx-user
On Monday, December 16, 2019 at 7:22:43 AM UTC-5, Gert Andersen wrote:
Now I get data for the Standard reports, but Rain Rate and Daily Rain are wrong. Although it has not rained, I have a value for RR and DR.
that is because you have assigned 'rain' to be 'rain_total'.
you do not need (and should not specify) 'rain' in the sensor_map, but you should specify 'rain_total' in the sensor map.
'rain' is a delta measurement (amount of rain in a period), whereas 'rain_total' is a cumulative measurement (total amount of rain).
'rain' is calculated from 'rain_total'. in the weewx-sdr driver, this is handle by the 'deltas' definition. see the comments in the sdr.py code for details.
this is what you want:
[SDR] ... [[sensor_map]] ... rain_total = rain_total.157.FOWH65BPacket
m
Gert Andersen
Dec 24, 2019, 12:38:31 AM12/24/19
to weewx-user
Hi Matthew
Thanks a lot, it's working now.
Rgds
Gert
Reply all
Reply to author
Forward
0 new messages