What is the relationship between IC auto speed and fuel consumption?

jbs
It'smore complicated than this, but it's a starting point --- their is a lot more available on the internet
http://www.mpgforspeed.com/

Jerry Roane
jbs
On Tue, 23 Jan 2018, Jerry Roane wrote:
> Jerry
> This discussion cuts to the heart of the vehicle energy disaster. (OPEC control of the world) This study by the US givernment trying to justify their 55 mph stupid
> is part of the problem not the solution to energy.
---------------------------------------------
> You received this message because you are subscribed to the Google Groups "transport-innovators" group.
> To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
> To post to this group, send email to transport-...@googlegroups.com.
> Visit this group at https://groups.google.com/group/transport-innovators.
> For more options, visit https://groups.google.com/d/optout.
>
>
Jerry Roane
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.

Carl Henderson (SD)
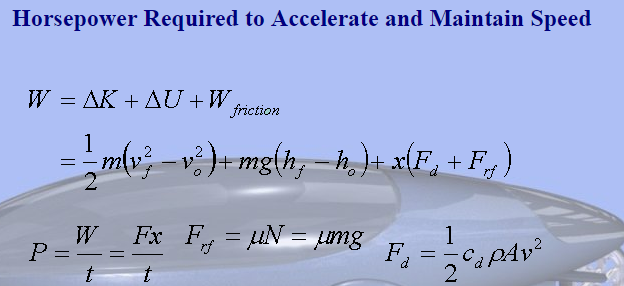
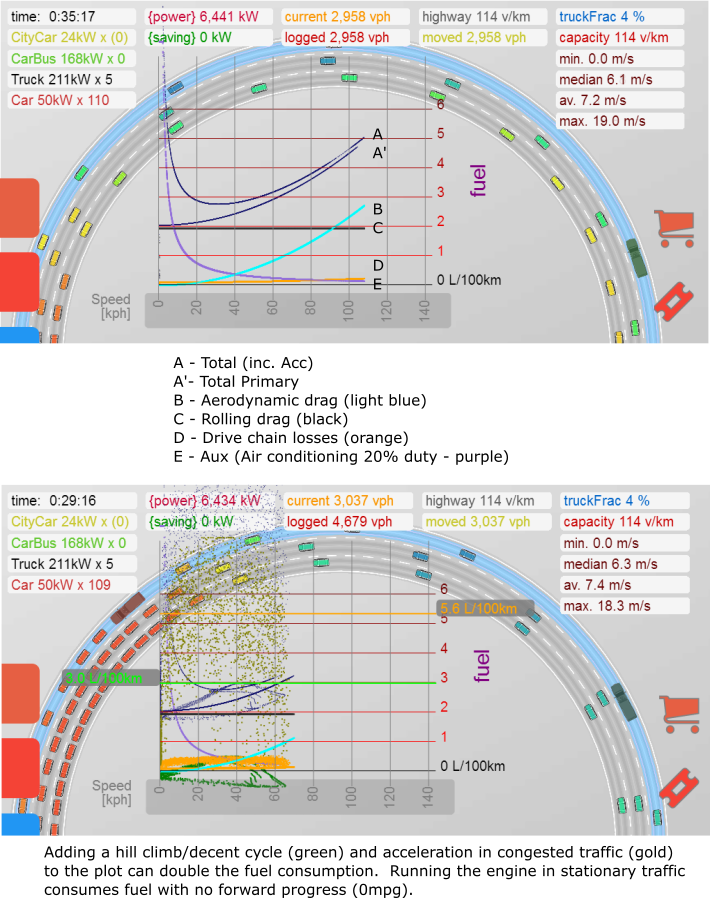
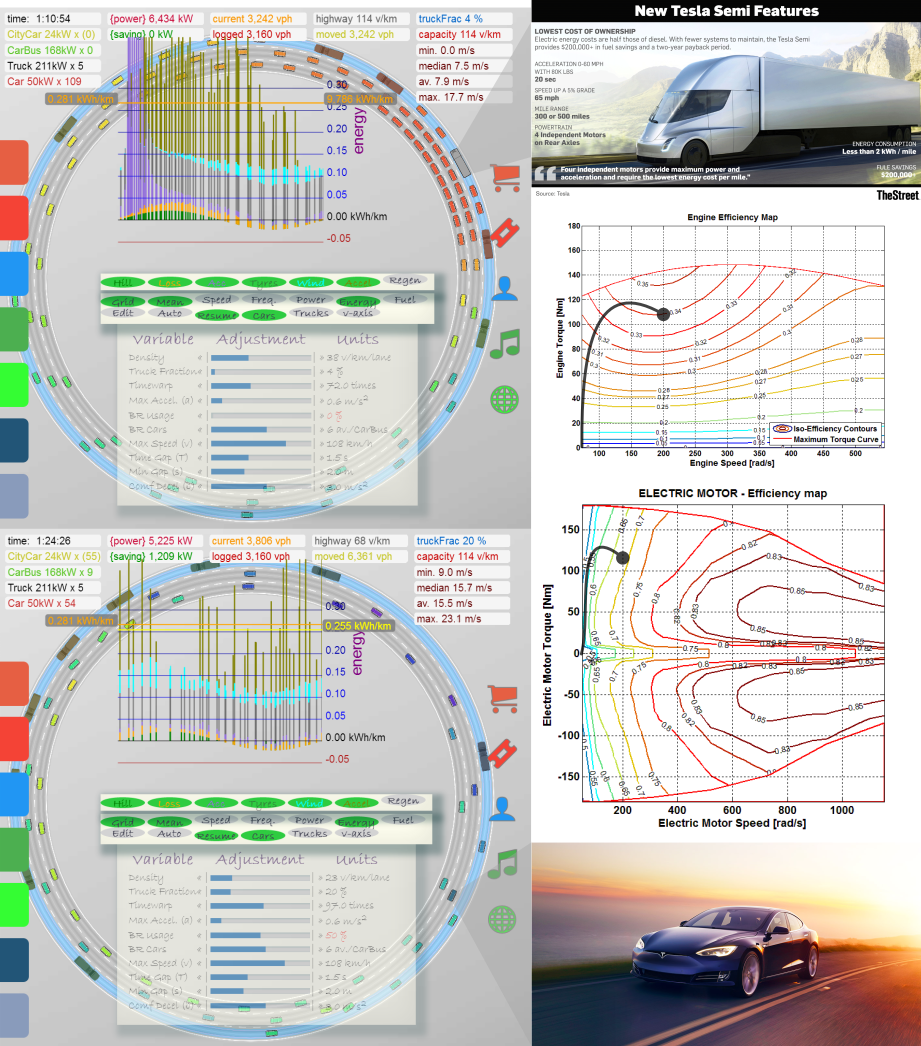
The vehicle needs energy to do work [Nm] = (Drag Forces [N] x distance
[m]) or (Power [N.m/s] x time [s]) and as JerryR states, rolling
resistance drag is assumed linear and aerodynamic drag is a squared
function wrt velocity - see clear plot attached (top).
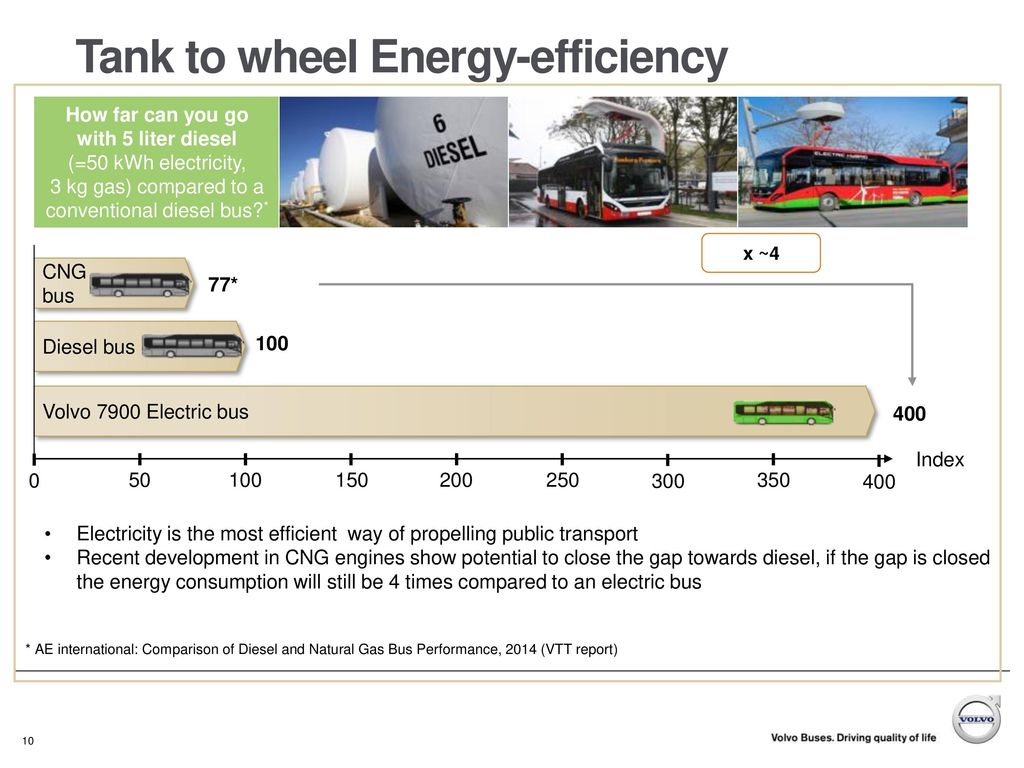
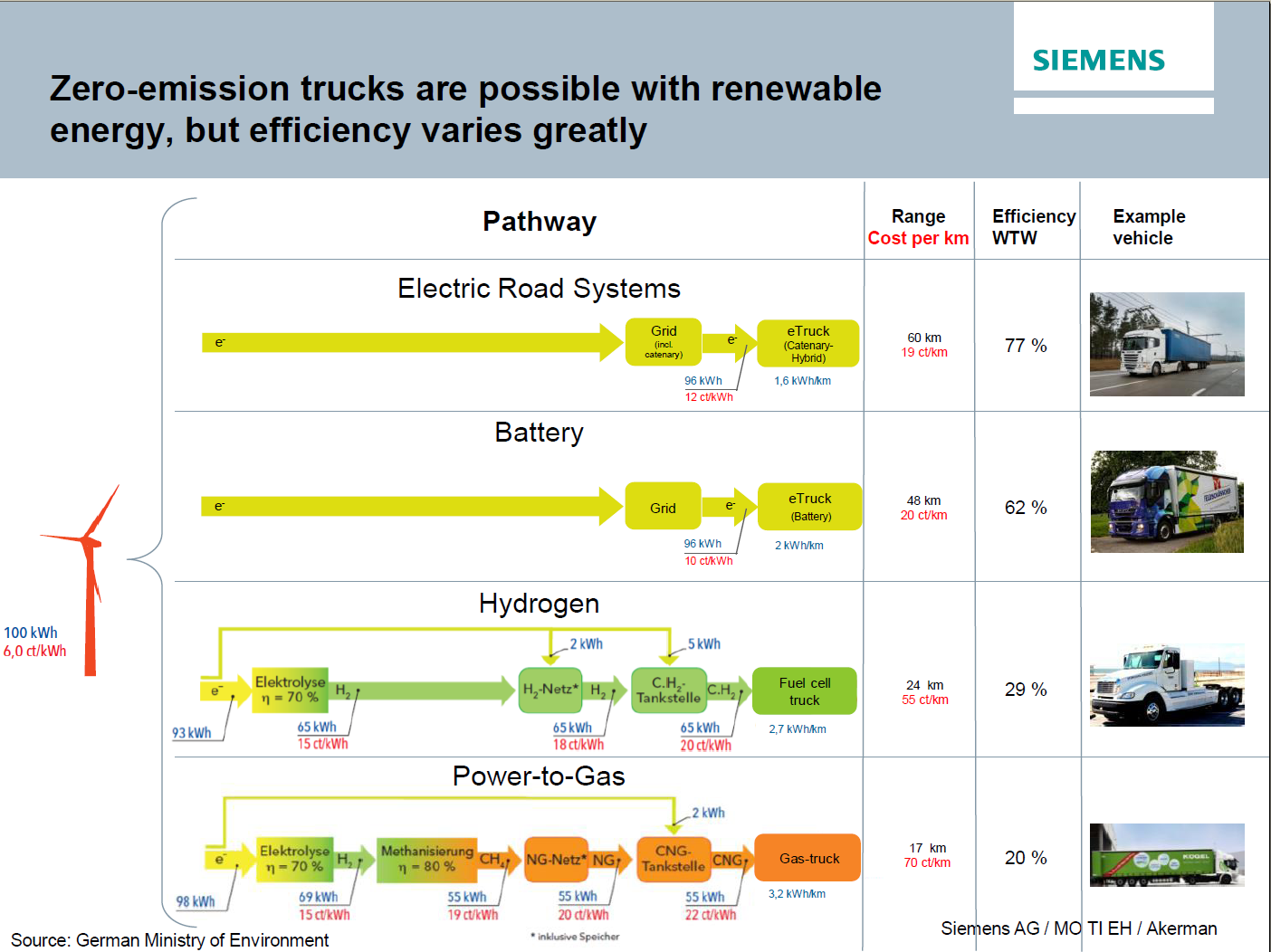
But the 'fuel in' (WTW chemical or electric energy) will be at least
twice the primary energy due to the significant conversion and
transmission losses.
Examples:
Diesel: 42.1 MJ/kg x 0.855 kg/ltr (at ~25C) = 36 MJ/ltr
36MJ/3.6 = 10 kWh/ltr
Diesel 10 kWh/ltr (chemical) * 48% conversion efficiency = 4.8 kWh/ltr
(mechanical) shaft output (not the 10kWh/ltr electric as stated in the
attached slide).
Diesel fuel production (80%), the engine (48%) efficient and the
driveline (85%) = 32%. The rest is wasted as heat on the way.
Electric generated from Gas (51%): transmission and distributed T&D
(99%x97%x99% = 95%): inverter and driveline 84% = 41%
Wind/Solar (95%?): Storage (74%): T&D (87%): inverter and driveline
(84%) = 51%
Mixed generation (73%): T&D (87%): BEV 'round trip' storage and
driveline (61%) = 39%
The total 'fuel in' is Primary Energy / overall efficiency.
Also for a given voltage (AC or DC) the power lost in an electrical
network is a square of the current. So saving 20% on the primary losses
draws less power (IV) through the network and so reduces the T$D losses
by as much as a third.
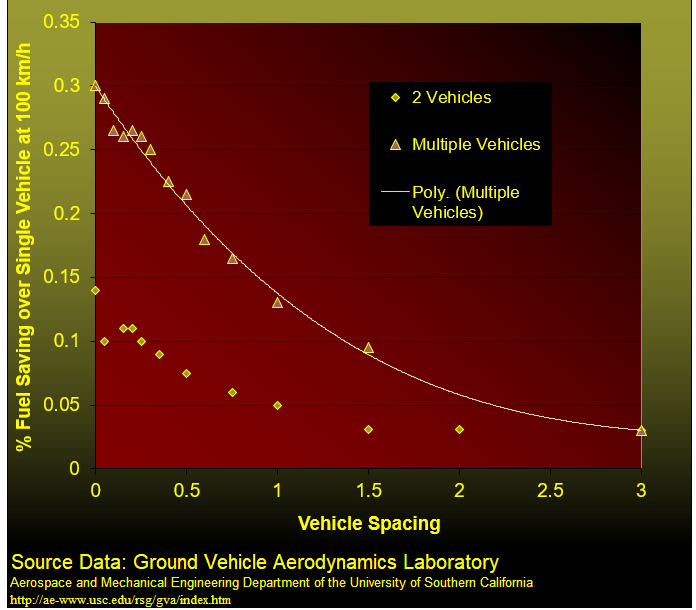
In congested traffic running the engine and/or auxiliary loads consumes
energy irrespective of the vehicle speed - see the less clear 'real
world' plot attached (bottom).
~Carl
PS. The tabulated values in kW (attached plots, top-left) are for
fossil (or generated electric) 'fuel-in' for the different vehicle
types. The primary power for each would typically be half that.
Jerry Roane
> To post to this group, send email to
> Visit this group at
https://groups.google.com/group/transport-innovators.
> For more options, visit https://groups.google.com/d/optout.
>
>
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Jerry Roane
Jerry,
> To post to this group, send email to
transport-innovators@googlegroups.com.
> Visit this group at
https://groups.google.com/group/transport-innovators.
> For more options, visit https://groups.google.com/d/optout.
>
>
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Jerry Roane
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Jerry Roane

WALTER BREWER
Jerry,
Sir Isaac Newton would agree to a first order, 3 vs 4 etc.
How would he feel if the wheel to surface contact deflection energies wee different. Or had nonlinear deflection vs force applied? If, for example, weight distribution, including due to acceleration/deceleration were different?
BTW. I have a 3 wheel cycle, 1 font, I use to ride on ice and snow roads. 24 vs 26 inch wheels. It takes more energy to pedal, even on dry roads. No differential, one wheel drive, but 2 rear wheels are on a driven shaft with bearings etc. So not a good proof of either point of view.
Walt Brewer
--------------------------------------------
Subject: Re: [t-i] What is the relationship between IC auto speed and fuel consumption?
Date: Saturday, January 27, 2018, 3:30 PM
post to this group, send email to transport-innovators@
googlegroups.com.
Visit
this group at https://groups.google.com/
group/transport-innovators.
For
more options, visit https://groups.google.com/d/
optout.
You received this message because you are subscribed to the
Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails
from it, send an email to transport-innovators+
To post to this group, send email to transport-innovators@
googlegroups.com.
Visit this group at https://groups.google.com/
group/transport-innovators.
For more options, visit https://groups.google.com/d/
optout.
You received this message because you are subscribed to the
Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails
To post to this group, send email to transport-...@googlegroups.com.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Carl Henderson (SD)
The imposed force vs deflection of tyres is nonlinear, trailing wheels
have less drag than driven, large wheels less than smaller ones and if
you pedal hard enough for long enough the heat build up in the tyres
will benefit you with reduced drag for a while as they cool. Slight
geometric misalignment of the additional wheel, even that caused by
frame flex during the pedal cycle, will induce torsion of the contact
patch and further increase drag. However, given that you use the
tricycle in the snow and ice I presume it is during the festive season
so there is likely more to carry than just the additional weight of one
extra wheel, there is a larger frame(s) to consider - proof enough for a
bike?
WALTER BREWER
Neat Buffalo NY, the festive season can run from November to April as far as ice and snow on roads**are concerned. But swamping the wheel to surface issues I brought up for Tri Tracks etc, and the extra shaft/bearings and issues you mention, is wind even protective clothing for. Be;ow 10 deg F, I wear a face mask. Person frontal area dominates. My cycle has 6 sped shifter to help. It is very stable , even on pure ice.
Couple days ago, FOX news, maybe Business news, interviewed a promoter of a 3rd wheel rear car. It seemed to have just one seat. "85% of commuters are SOV". So more stable, and better wind protection I suppose.
** My favorite subject for research. Why we can't clear roads down to surface, instead a dangerous layer of ice.snow.
Walt Brewer
--------------------------------------------
On Sun, 1/28/18, Carl Henderson (SD) <carl.he...@silvertipdesign.com> wrote:
Subject: RE: [t-i] What is the relationship between IC auto speed and fuel consumption?
To: transport-...@googlegroups.com
Date: Sunday, January 28, 2018, 5:27 AM
Carl Henderson (SD)
Possibly overly subtle to make it across the Atlantic but I had implied
that your bike may have been harder to pedal in the ice and snow because
of seasonally large food portions and increased frame weight and it was
likely safer on a bike than in a car due to possibly a little alcohol.
For an urban concept I would like to have a go in the i-Road - image
attached. It steers at the rear and leans at the front.
Jerry Roane
To: "transport-innovators" <transport-innovators@googlegroups.com>
10:51 AM, Carl Henderson (SD) <carl.henderson@silvertipdesign.com>
Visit this group at
https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google
Groups "transport-innovators" group. To unsubscribe from this group and
stop receiving emails from it, send an email to
Visit this group at
https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Jerry Roane

Jerry,I agree with the poor performance of modern steering systems especially in tighter turns at lower speeds but overall the handling needs to be safe (under-steered). Yes, you can use steer-by-wire to correct for the problems of steering anomalies but you are moving mass out board when you really need to keep the wheel ends light and you should really be reducing complexity. This solution requires more sensors and is best used for compact packaging in small cars. Also these delicate components and electrics will experience far higher abuse at the wheel ends on rough roads. I prefer the old Jaguar policy of moving everything in-board even the discs. A light weight twin link steering system would allow you to move the steering drive (passive or active) back to the chassis or body of the vehicle and then it does not matter what the suspension does when reacting to road irregularities or to the braking, driving and cornering forces, the wheels always point in the right direction. This is such a good idea that I built it into my award winning 16m semi-trailer and it works - other brands are available.~Carl
-----Original Message-----
From: transport-innovators@googlegroups.com [mailto:transport-innovators@googlegroups.com] On Behalf Of Jerry Roane
Sent: 28 January 2018 15:05
To: transport-innovators
Subject: Re: [t-i] What is the relationship between IC auto speed and fuel consumption?CarlYou bring up wheel alignment to the intended path. This is an important tweak to improve all cars and motorcycle's efficiency. Pointing the wheels in the precise direction is not presently done in front end steering elements. They approximate straight but do not achieve exact wheel pointing. I suggest in the self-diving mode it will be easier to remove this error in how front ends are constructed and that the electronics can properly point the wheels in the exact direction of intended travel.if you look at the tires on a dirt track race car you will notice the tires are pointed wonky (a technical term) They do this to compensate for all the slipping and sliding that it going on but if you were to drive those same cars set up that way on asphalt they would eat up a set of tires in a few hundred miles. Not only is the caster can camber set up heavily conflicting the steering angles change as the steering wheel is turned. The basic geometry of the drag link and steering rods is intentionally not correct to match the arc of the travel of the car. The tires always rub off on the pavement in a parking garage as is evidenced by the black scuff marks on the concrete. With self-driving cars no longer will you steer with just one steering wheel but rather you will steer each front wheel separately. This would allow for the tire to roll EXACTLY on the intended arc of the car. This will be true whether the weight in the car is heavy or light.Today's front suspensions are pretty bad for tire scrub and not that great for braking and steering performance. Going to self-driving drive by wire introduces an opportunity to correct this historical error in steering design.I like that you mentioned the flex of the tricycle as misaligning the tires. That may seem slight but when you are pedaling you feel. Feeling is what is missing in the ICE design. If power was measured and reported like speed and fuel tank gallons people would have a better understanding of where the energy is wasted. Instead we are fully insulated from the feel of the energy losses. (except on a bicycle or tricycle)On pedaling vehicles (human power) it is important to get the biggest wheels you can afford and pump the tires till they are ready to explode. Also back off on the ball bearing compression a bit of a turn. You should be able to spin the wheel up in the air and it should continue to spin for at least a minute to know you got the ball bearing tension correct and the proper light oil.The optimum tires for a bike will be found on the flat track bikes in the Olympics. On three wheels you can get away with those tires on pavement instead of oak hardwood.Good discussion,Jerry Roane
To post to this group, send email to
transport-innovators@googlegroups.com.
Visit this group at
https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google
Groups "transport-innovators" group. To unsubscribe from this group and
stop receiving emails from it, send an email to
To post to this group, send email to
transport-innovators@googlegroups.com.
Visit this group at
https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
Carl Henderson (SD)
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Jerry Roane

Jerry,
I like the fact that your vehicle holds on to the track. But all tyres slip (or in the case of steel tyres on steel rails it is termed creep) in order to generate the side forces needed to corner on a road surface. By contrast the running surfaces of your track are inclined so that both the vertical and the lateral forces on each side of the guideway will induce differing amounts of creep in opposing sets of wheels. Active steering under these conditions will be a challenge and likely not even necessary. At higher speeds on road tyres it is better dynamically to steer the front wheels and at low speeds, rear steer does improve manoeuvrability. The i-track appears to be about the limit for small light-weight rear-steered vehicles.I agree with the technology advancements sometimes being hindered by new rules. My first patent was a mechanism for trials bikes. As you will likely know, the sport is all about control and balance while negotiating rocky terrain on a motor bike. In the 1980's the top riders were leaving the novice riders out of the running, discouraging new entrants into the sport. And the one key skill that was difficult to master was using the brakes in combination with bouncing the bike backwards, possibly up hill, to get the front wheel out from between rocks. So at university I designed and built a reversing clutch into the rear hub of a trials bike (not a road bike) and modified the rear brake pedal to be double acting. A point or two penalty could have been applied to the score so that novice riders could still compete head to head with the top riders and so gain places and confidence. But before I could develop the system officials changed the rules and gave a full five point penalty for moving backwards even slightly. The new rules killed my patent and changed the sport, it is now more like motocross.~Carl
-----Original Message-----
From: transport-innovators@googlegroups.com [mailto:transport-innovators@googlegroups.com] On Behalf Of Jerry RoaneSent: 28 January 2018 21:14
To: transport-innovators
Subject: Re: [t-i] What is the relationship between IC auto speed and fuel consumption?
CarlI would modify the safe concept you brought up. Under-steer is only necessary when the wheels can slide. If the physical configuration of the wheels does not allow any slide then you want neither under nor over-steer. You just want steer the right direction. Again it is back to the core assumptions. I assume that rubber tires are over for the bulk of travel. They slip and slide and don't stop well enough to save the last 40,200 lives a year. I say stop depending on rubber against asphalt as it ain't workin'.As for rubber tires mounted on rims that are steered I would inject the last bit of accuracy and add dynamics to the steering in a hard turn and would be different from steering that same rim into a gentle turn. One more layer of accuracy. I bought up the dirt track race cars as they show a visual easy to see difference between pointing the wheels down track and flat to the rolling surface but the end effect is to keep the tire rubber tread (not the rims) aligned to the intended direction of force. On a dirt tracker you are never pointed in the direction of travel but a more aggressive turn that includes drifting. So each tire on a dirt tracker (to a lessor degree wet asphalt) needs to be steered fully independent of all the other wheels to optimize the tread direction as it touches the Earth patch of dirt and mud. What is great about racing is no matter the theory or incorrect theory the fastest car wins and the fastest car has the best immediate theory behind it. As race cars evolve (monkey see monkey do) we have seen lots of attempts to improve steering. Some improvements get banned by the race committee because they are too good. That is unfortunate that race rules would ruin the good that can come from racing but that is the reality. In high end racing they banned allowing the air foils from being active. In drag racing they banned the fastest cars with different engine types because they went too fast to be safe on the tracks as built. There are lots of examples of advances being taken away by race rules over history.It is rare to buy a street car that has rear wheel correction of the steering but they are out there. It may seem like a silly idea to add another set of parts to rear steer up until you are talking cornering on asphalt. Then the difference between grip and spin out is razor thin. The rear steering gives that thin advantage and a tighter turning radius.On guideway with 7 wheels each wheel only goes on the exact path of the intended direction. There is zero side load and thus zero scuffing. Three sides of the beam are touched so the 3D trajectory is not left to gravity but is held precisely statically and dynamically. Braking is not through the wheel to beam patch. That is the fundamental difference that makes low rolling resistance practical and safe.Jerry Roane

To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsubscrib...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innovators+unsub...@googlegroups.com.
To post to this group, send email to transport-innovators@googlegroups.com.
Visit this group at https://groups.google.com/group/transport-innovators.
For more options, visit https://groups.google.com/d/optout.
Carl Henderson (SD)
-----Original Message-----
From: transport-...@googlegroups.com [mailto:transport-...@googlegroups.com] On Behalf Of Jerry Roane
Sent: 31 January 2018 03:28
To: transport-innovators
Subject: Re: [t-i] What is the relationship between IC auto speed and fuel consumption?
Carl
You do not have a proper image in your head of TriTrack's guideway wheel configuration. Here is a photo of a plastic printed model that may help.
The force vector diagram of this configuration has no side load on the tires (tyres) The rotational forces zero out against each other. The wheels roll straight with no side load and so no side slip. There is one traction wheel that does get longitudinal slip but no side slip. The patent describes how that capstan wheel can also be a linear motor so there is no tyre that slips at all in the linear motor propelled version. The amount of slip of the capstan is dynamically controlled so it is minimized by applying appropriate down-force to that one wheel (tyre)I am not sure where steering came up in your imagination while on the guideway. It has no choice but to follow the exact path of the three 60 degree opposed rolling surfaces. If the plane of the three axles were to get bent that would be the only way to get the wheels to slip or creep. That plane is fixed in the molding of the body shell so not likely to get bent. There is no steering on the guideway. You get on at the start of that piece of metal and you exit the opposite end of that piece of metal.On the surface street all bets are off. The steering sucks while on the street I freely admit. I do not intend for you to drive much on the street as there are few advantages on the ground. The front suspension is a torsion bar arrangement so the camber is wonky depending on how much desert you had that day. The tyres are going to wear funny but I do not care. In the self-driving mode with drive by wire the wheels will be properly pointed down the intended path. In the manual steering version the wheel direction will be an approximation of where they need to point. The front tires are a wear item as they are on any regular car. Tread patterns wear non-uniformly on front tires for many reasons. The front alignment is modified to balance the tread wear but they will always wear the outer tread more than the inner inner edge of the tread from cornering. On the street TriTrack has the same flaws as all the other cars on asphalt. On guideway it excels.Let me know if this explains the lack of creep.Jerry Roane
On Tue, Jan 30, 2018 at 1:55 PM, Carl Henderson (SD) <carl.he...@silvertipdesign.com> wrote:
Jerry,I like the fact that your vehicle holds on to the track. But all tyres slip (or in the case of steel tyres on steel rails it is termed creep) in order to generate the side forces needed to corner on a road surface. By contrast the running surfaces of your track are inclined so that both the vertical and the lateral forces on each side of the guideway will induce differing amounts of creep in opposing sets of wheels. Active steering under these conditions will be a challenge and likely not even necessary. At higher speeds on road tyres it is better dynamically to steer the front wheels and at low speeds, rear steer does improve manoeuvrability. The i-track appears to be about the limit for small light-weight rear-steered vehicles.I agree with the technology advancements sometimes being hindered by new rules. My first patent was a mechanism for trials bikes. As you will likely know, the sport is all about control and balance while negotiating rocky terrain on a motor bike. In the 1980's the top riders were leaving the novice riders out of the running, discouraging new entrants into the sport. And the one key skill that was difficult to master was using the brakes in combination with bouncing the bike backwards, possibly up hill, to get the front wheel out from between rocks. So at university I designed and built a reversing clutch into the rear hub of a trials bike (not a road bike) and modified the rear brake pedal to be double acting. A point or two penalty could have been applied to the score so that novice riders could still compete head to head with the top riders and so gain places and confidence. But before I could develop the system officials changed the rules and gave a full five point penalty for moving backwards even slightly. The new rules killed my patent and changed the sport, it is now more like motocross.~Carl
-----Original Message-----
From: transport-innovators@googlegroups.com [mailto:transport-innovators@googlegroups.com] On Behalf Of Jerry Roane
Sent: 28 January 2018 21:14
To: transport-innovators
Subject: Re: [t-i] What is the relationship between IC auto speed and fuel consumption?
CarlI would modify the safe concept you brought up. Under-steer is only necessary when the wheels can slide. If the physical configuration of the wheels does not allow any slide then you want neither under nor over-steer. You just want steer the right direction. Again it is back to the core assumptions. I assume that rubber tires are over for the bulk of travel. They slip and slide and don't stop well enough to save the last 40,200 lives a year. I say stop depending on rubber against asphalt as it ain't workin'.As for rubber tires mounted on rims that are steered I would inject the last bit of accuracy and add dynamics to the steering in a hard turn and would be different from steering that same rim into a gentle turn. One more layer of accuracy. I bought up the dirt track race cars as they show a visual easy to see difference between pointing the wheels down track and flat to the rolling surface but the end effect is to keep the tire rubber tread (not the rims) aligned to the intended direction of force. On a dirt tracker you are never pointed in the direction of travel but a more aggressive turn that includes drifting. So each tire on a dirt tracker (to a lessor degree wet asphalt) needs to be steered fully independent of all the other wheels to optimize the tread direction as it touches the Earth patch of dirt and mud. What is great about racing is no matter the theory or incorrect theory the fastest car wins and the fastest car has the best immediate theory behind it. As race cars evolve (monkey see monkey do) we have seen lots of attempts to improve steering. Some improvements get banned by the race committee because they are too good. That is unfortunate that race rules would ruin the good that can come from racing but that is the reality. In high end racing they banned allowing the air foils from being active. In drag racing they banned the fastest cars with different engine types because they went too fast to be safe on the tracks as built. There are lots of examples of advances being taken away by race rules over history.It is rare to buy a street car that has rear wheel correction of the steering but they are out there. It may seem like a silly idea to add another set of parts to rear steer up until you are talking cornering on asphalt. Then the difference between grip and spin out is razor thin. The rear steering gives that thin advantage and a tighter turning radius.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To post to this group, send email to transport-...@googlegroups.com.
Bruce A. McHenry
It has been a long time since I participated in this group so first of all, hello to everybody. I credit this group (and Dr. Schneider especially) for teaching me about PRT and particularly dual-mode PRT, energy economics, and urban planning in the early 00's. Around 2005, I started to propose passenger roadtrains that form and disperse while in motion. I employed Tomasso Gecchelin who developed excellent CAD renderings: https://youtu.be/KczzacodT68?t=7 I let him go, and he got funding in Dubai for a mock-up of bus modules: https://www.next-future-mobility.com/
For the long-term evolution of the highways, I am thinking now about cars that retract their tires and settle onto steel wheels that balance on a single rail.
Relative to today's cars, the advantages will be obvious to everyone in this group: 1) high MPG and MPG-e, 2) ground circuit for power, 3) no bouncing between two rails so smooth ride, 3) fewer components relative to other dual-mode including Carl's BladeRunner (which inspired this approach). 4) easy switching. I hope there would also be low infrastructure costs since tram rails are well understood and widely deployed, and much lower side forces on the rail so lower maintenance costs.
- wheels wide enough to balance by steering like a bicycle (or unicycle)
- lateral movement of the wheel(s)
- movable counterweight
- ailerons
Best to all,
Bruce McHenry
+1 650 656 0060
To: "transport-innovators" <transport-...@googlegroups.com>
10:51 AM, Carl Henderson (SD) <carl.he...@silvertipdesign.com>
Jerry Roane
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/CACm-%2BD1V-1nGvcKi2kCRjEFrzjsZ_BHmFrke1TjRQhgYvCAcSQ%40mail.gmail.com.
Bruce A. McHenry
Relative to powering the highways, putting a half-ton of batteries in every car is far from efficient. That's a lot of weight to carry, and there are charge/discharge losses. How much is that? I've seen figures as high as 40%. And it's impractical because you must stop to recharge. And there is nowhere near enough charging infrastructure.
If instead of building charging stations for 300 million vehicles, we powered the highways then a typical car would not need more than 20 kWh for 50 miles. But if you are going to power the lanes then you might as well set them up for dual-mode as well. As far as I know, using a single rail embedded in the road is novel. It should provide a very smooth ride, and a very energy-efficient one, especially for the larger kinds of vehicles that consumers prefer. Who wouldn't want a sleeper car that can deliver you to destinations 400-500 miles away while sleeping comfortably at an MPGe around 300?
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/CAEsQt-dNek3BuZ5OfGvY1N1yZPedSvcX1OaaE5FbKH7UOPh%3DSQ%40mail.gmail.com.
Bruce A. McHenry
Then there will always be remote roads that will never be powered so we will always want to have ICE vehicles that serve as locomotives for physically connected vehicles. If also in the snow belt, every vehicle in the roadtrain must power its own wheels so ICE locomotives will need to generate electricity instead of just driving wheels.

Bruce McHenry
Thanks for pointing that out. The MPGe figures for electric cars are based on converting 100% of the heat energy in a gallon of gas into electricity. It's marketing, not engineering.
Best,
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/CAEsQt-dNek3BuZ5OfGvY1N1yZPedSvcX1OaaE5FbKH7UOPh%3DSQ%40mail.gmail.com.
Jerry Roane
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/CACm-%2BD3_D%2BVPkD09AJ1Z1GHp_entjWyYGTYMfTDmzOVUZ1vPHA%40mail.gmail.com.
Carl Henderson - SD
Hi Bruce,
Steel on steel is a poor interface for traction and braking
forces of light vehicles and with a little lubrication (from oil
or leaves on the track) it would be lethal for cornering. Both
tritrack and RUF address this with a guideway and a tunnel through
the vehicle.
The lateral movement of the wheels, the counterweight (batteries)
and the ailerons are all technologies being deployed to address
the challenges of narrow vehicles (<1m: I-Road, Triggo, Carver,
IEV-XX, Tango).
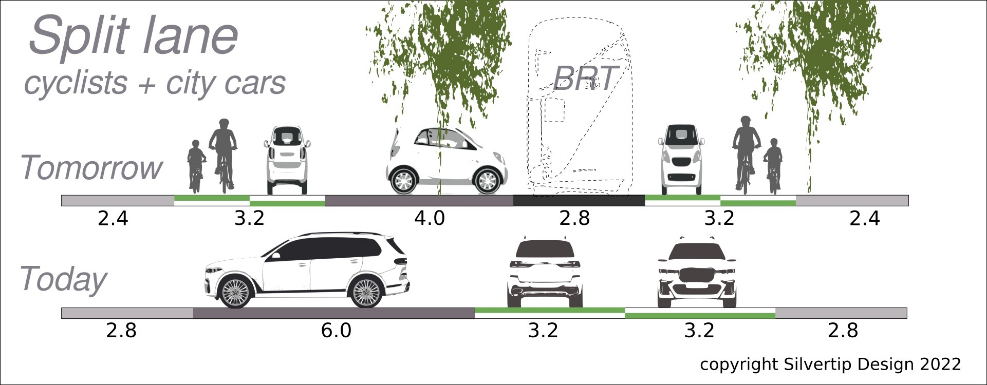
Concept suggestion: With just two or three seater narrow vehicles
you could readily create split-lane zones throughout urban areas
and provide an additional narrow lane for cargo bikes and
cyclists. This is in addition to elevated PRT stations attached
to buildings and even BRT corridors on the ground for use during
rush hour (refuse collection and large deliveries at other times).
There would also be a four fold increase in parking.
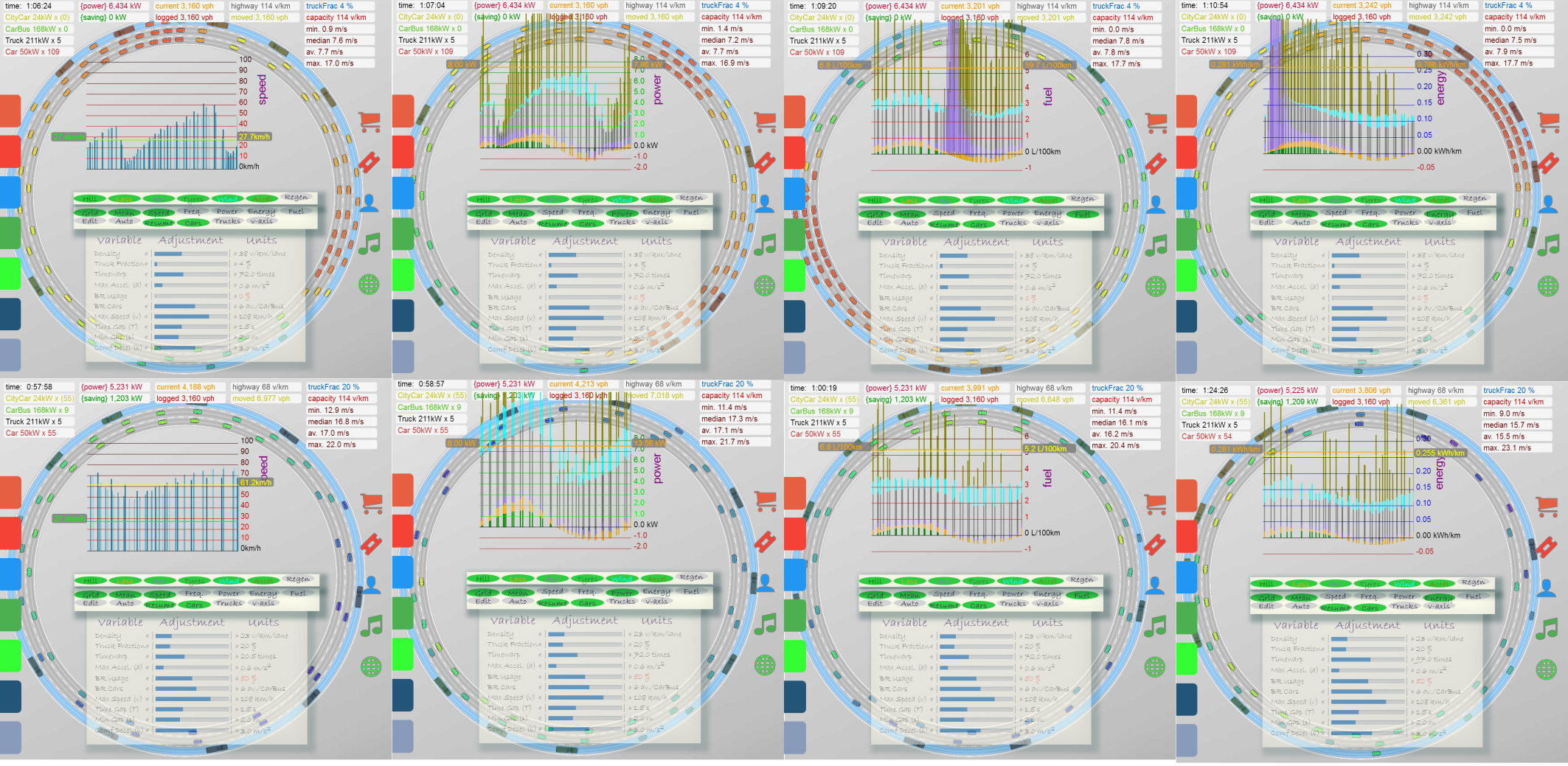
I have recently created a personal website and added an open-source traffic simulator (link below) which deals with vehicle efficiencies.
Kind
regards
~Carl
Carl Henderson
HND,
BEng(Hons), MSc, MIRTE, MSOE
“If I had asked people what they wanted, they would have said faster horses.” - Henry Ford
M: 07935 486044
E: carl.he...@silvertipdesign.com
W:
www.silvertipdesign.co.uk
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/CACm-%2BD3_D%2BVPkD09AJ1Z1GHp_entjWyYGTYMfTDmzOVUZ1vPHA%40mail.gmail.com.

Palle R Jensen
Charl Du toit
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/1UbpmvWcNl.2PtI0zFzKtL%40ejers.
Palle R Jensen
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/1697870266.756981.1653984177111%40webmail.xtra.co.nz.
Charl Du toit
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/1UbpmwQgOc.16D0apdVHC7%40ejers.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
tyler
Jerry Roane
--
You received this message because you are subscribed to the Google Groups "transport-innovators" group.
To unsubscribe from this group and stop receiving emails from it, send an email to transport-innova...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/6b9a9bcb-6240-4e07-96f0-f5083dd55127n%40googlegroups.com.
tyler
Jerry Roane
To view this discussion on the web visit https://groups.google.com/d/msgid/transport-innovators/4b92a9c1-28d6-4972-830f-91fec10afa91n%40googlegroups.com.