Transparent object and pose reconstruction
25 views
Skip to first unread message

A-R_Researcher
Mar 26, 2018, 1:37:32 PM3/26/18
to Theia Vision Library
Hello,
I would like to get opinions and ideas on how to do camera pose estimation, given a transparent object marker.
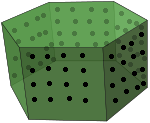
The object I have is a uniform hexagonal prism with transparent faces, with little dots printed on each face in a regular square grid. Something like the following, made out of transparent glass and with dots all over the faces (not just three). It's not clear from the picture here, but given that the camera is close to the object, I can -relatively- easily tell points on the close face apart from points on the far away face, as they are clearly of different sizes.
I know the size of the object, and the size of the grid.
How can I reconstruct the camera intrinsic and extrinsic parameters by looking at this object? Should I go for a homography based approach or is there a better way? Any code samples of course would be welcome.
Thanks everyone!

Chris Sweeney
Mar 27, 2018, 11:59:42 PM3/27/18
to A-R_Researcher, Theia Vision Library
If your features are actually distinct you should just try the default SfM pipeline for theia. Homographies will probably give you a better model for the scene, but standard pipelines should do just as well if it can match features with a high enough quality. The website is a good place to start browsing around: http://theia-sfm.org/
Chris
--
You received this message because you are subscribed to the Google Groups "Theia Vision Library" group.
To unsubscribe from this group and stop receiving emails from it, send an email to theia-vision-lib...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Reply all
Reply to author
Forward
0 new messages