Re: [ROS-Industrial] motoman ROS-I dx100 service call 'robot enable'
200 views
Skip to first unread message

G.A. vd. Hoorn - 3ME
Jan 26, 2018, 7:22:27 AM1/26/18
to swri-ros...@googlegroups.com
On 25-1-2018 23:26, Sinaí Aranda wrote:
> HI,
> I'm trying connect mh6-10 robot motoman with controller dx100 to ROS. I
> have followed tutorials of ROS-I, but I have problems in pc-ROS-client.
>
[..]
>
> What is 'robot enable'? How is call from motoman_driver or
> industrial_robot_client packages? Someone have documentation? literal
> explication.
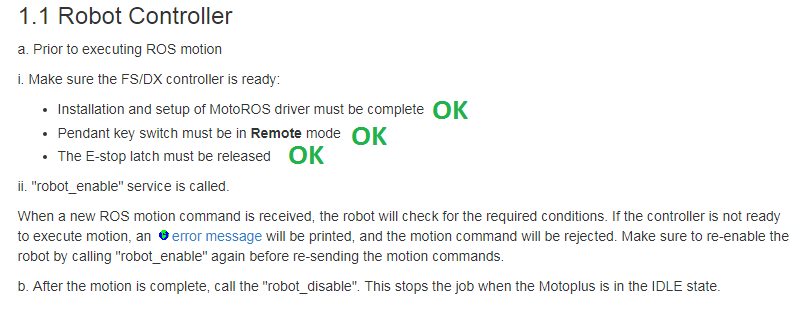
The robot_enable service is a ROS service that controls (if you will) an
enabling 'switch' inside the motoman driver nodes.
By default, the driver is 'disabled' and will not let any motion
requests through.
After calling the service and enabling the driver, motion requests will
be passed on to the robot controller and you can control the robot using
an action client.
As to how to interact with the service: you can either invoke it from
the command line, using rosservice, or using a regular roscpp/rospy
service client.
Gijs
PS: there was no need to send this message 3 times, nor cross-post it to
ROS Discourse.
> HI,
> I'm trying connect mh6-10 robot motoman with controller dx100 to ROS. I
> have followed tutorials of ROS-I, but I have problems in pc-ROS-client.
>
[..]
>
> What is 'robot enable'? How is call from motoman_driver or
> industrial_robot_client packages? Someone have documentation? literal
> explication.
The robot_enable service is a ROS service that controls (if you will) an
enabling 'switch' inside the motoman driver nodes.
By default, the driver is 'disabled' and will not let any motion
requests through.
After calling the service and enabling the driver, motion requests will
be passed on to the robot controller and you can control the robot using
an action client.
As to how to interact with the service: you can either invoke it from
the command line, using rosservice, or using a regular roscpp/rospy
service client.
Gijs
PS: there was no need to send this message 3 times, nor cross-post it to
ROS Discourse.

Sinaí Aranda
Jan 26, 2018, 9:48:17 AM1/26/18
to swri-ros-pkg-dev






What is the service for enable 'switch' inside the motoman driver node?

Thanks!
G.A. vd. Hoorn - 3ME
Jan 26, 2018, 9:51:28 AM1/26/18
to swri-ros...@googlegroups.com
On 01/26/2018 03:48 PM, Sinaí Aranda wrote:
> [image: Imágenes integradas 2]
> [image: Imágenes integradas 3]
> [image: Imágenes integradas 4]
> [image: Imágenes integradas 5]
> [image: Imágenes integradas 1]
> [image: Imágenes integradas 6]
>
>
> What is the service for enable 'switch' inside the motoman driver node?
>
> [image: Imágenes integradas 7]
I don't see any images, so I don't know what you are referring to.
> [image: Imágenes integradas 2]
> [image: Imágenes integradas 3]
> [image: Imágenes integradas 4]
> [image: Imágenes integradas 5]
> [image: Imágenes integradas 1]
> [image: Imágenes integradas 6]
>
>
> What is the service for enable 'switch' inside the motoman driver node?
>
> [image: Imágenes integradas 7]
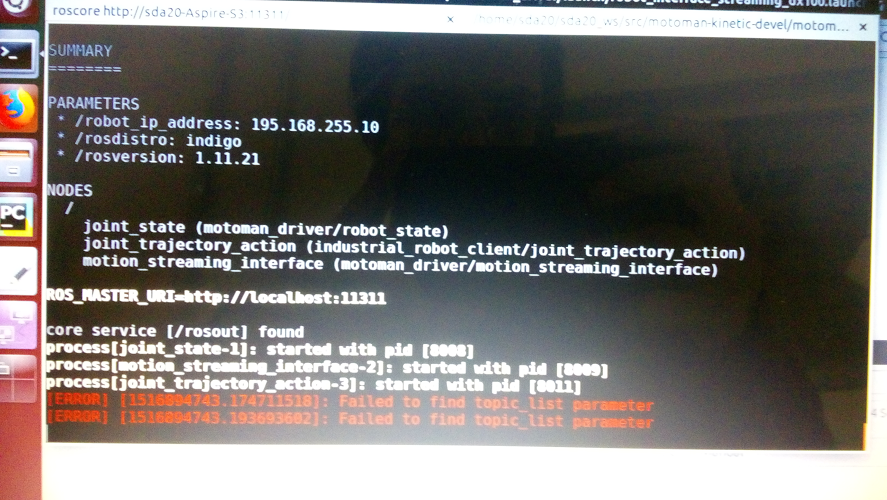
Also: if you are trying to show us console text, please just copy-paste
it into your email.
The service is called 'robot_enable'. See also [1].
Gijs
[1]
https://github.com/ros-industrial/motoman/blob/808a8c16d9120814c11438b8809cfb957bf3a70f/motoman_driver/src/joint_trajectory_streamer.cpp#L91
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
G.A. vd. Hoorn - 3ME
Feb 2, 2018, 11:01:09 AM2/2/18
to swri-ros...@googlegroups.com
On 2-2-2018 16:59, Sinaí Aranda wrote:
> HI Gijs,
>
> I have trying run the node of service, but I don't see the service. You can
> help me?, how run node service?.
Running 'rosservice list' does not show a 'robot_enable' service after
> HI Gijs,
>
> I have trying run the node of service, but I don't see the service. You can
> help me?, how run node service?.
you have started the driver?
Gijs
Sinaí Aranda
Feb 2, 2018, 11:15:23 AM2/2/18
to swri-ros-pkg-dev
No, just show me this:
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice list
/joint_state/get_loggers
/joint_state/set_logger_level
/joint_trajectory_action/get_loggers
/joint_trajectory_action/set_logger_level
/motion_streaming_interface/get_loggers
/motion_streaming_interface/set_logger_level
/rosout/get_loggers
/rosout/set_logger_level
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice call /joint_trajectory_action/
/joint_trajectory_action/get_loggers
/joint_trajectory_action/set_logger_level
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice call /joint_trajectory_action/get_loggers
loggers:
-
name: ros
level: info
-
name: ros.industrial_robot_client
level: info
-
name: ros.industrial_utils
level: info
-
name: ros.roscpp
level: info
-
name: ros.roscpp.roscpp_internal
level: info
-
name: ros.roscpp.superdebug
level: warn
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice list
/joint_state/get_loggers
/joint_state/set_logger_level
/joint_trajectory_action/get_loggers
/joint_trajectory_action/set_logger_level
/motion_streaming_interface/get_loggers
/motion_streaming_interface/set_logger_level
/rosout/get_loggers
/rosout/set_logger_level
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice call /joint_trajectory_action/
/joint_trajectory_action/get_loggers
/joint_trajectory_action/set_logger_level
sda20@sda20-Aspire-S3:~/sda20_ws$ rosservice call /joint_trajectory_action/get_loggers
loggers:
-
name: ros
level: info
-
name: ros.industrial_robot_client
level: info
-
name: ros.industrial_utils
level: info
-
name: ros.roscpp
level: info
-
name: ros.roscpp.roscpp_internal
level: info
-
name: ros.roscpp.superdebug
level: warn
{kind=link}
Sinaí Aranda
Feb 2, 2018, 11:45:42 AM2/2/18
to swri-ros-pkg-dev
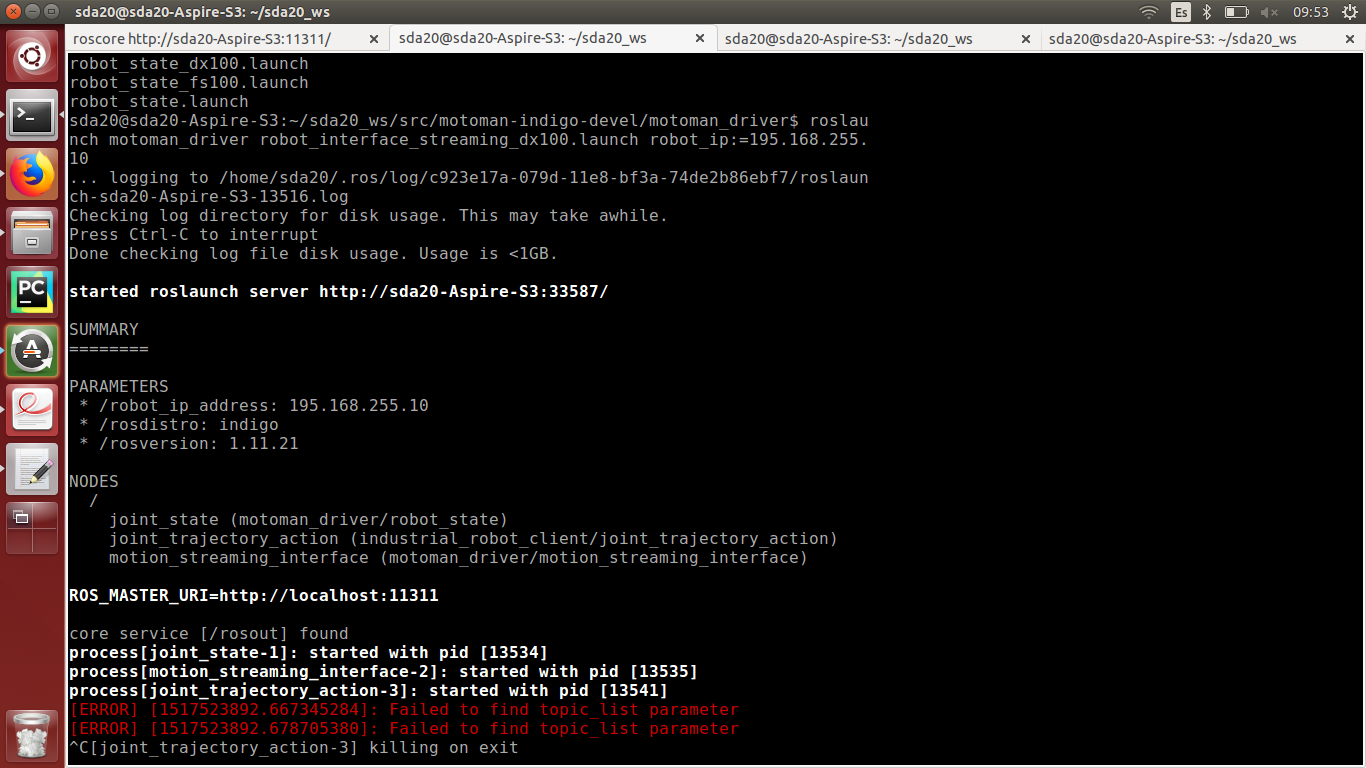
How start the driver?
El viernes, 2 de febrero de 2018, 10:01:09 (UTC-6), gavanderhoorn escribió:
Sinaí Aranda
Feb 27, 2018, 11:48:42 AM2/27/18
to swri-ros-pkg-dev
Problem is resolved with configuration ip ethernet pc to the same domain that ip robot. THANKS
El viernes, 26 de enero de 2018, 6:22:27 (UTC-6), gavanderhoorn escribió:
Reply all
Reply to author
Forward
0 new messages