
Damian Axford
Oct 5, 2015, 7:50:05 AM10/5/15
to swindon-hackspace
Hi All
Many of you will be aware of the new project thanks to wed/twitter/telegram, but thought it was worth capturing some info here in the group for everyone else.
A couple of weeks ago, Rob and I were discussing how to build on the LogoBot/SCOB projects, with something more capable/sophisticated. In particular, we wanted to try something that:
- has legs, with more joints that SCOB (i.e. 3 or 4)
- can move faster; go further
- will let us play with inverse kinematics
- potential to carry more sensors/computing power (camera, RPi, etc)
- potential to carry a small payload (with the bacon sandwich challenge in mind)
After a lot of googling/discussion, we came to the following short-list:

- A bipedal dinosaur robot, inspired by Titrus (https://www.youtube.com/watch?v=GxVv4WNlXMA&feature=youtu.be)
- A multimodal quadruped, that can also roll along like a wheel, inspired by BilbiQ (https://www.youtube.com/watch?v=8judnp6fBqw)
- A working AT-ST... I think you can guess what that was inspired by
On balance, we selected option 2 and thus was born the Quadruloop project. Ticks all the boxes, and critically, it is cheap to prototype with TowerPro SG90 servos and then scale-up to better stuff if/when it works.
Design options
There are quite a few ways to make something that can walk and roll, roughly divided into the following groups:
- the legs convert to wheels
- the legs end in wheels/tracks
- has legs and wheels
We went with legs converting to wheels for coolness/originality factor. The with wheels alternative was briefly discussed, but it's not as cool:

The next design choice was quadruped vs hexapod (or any other number of legs).... there is an example of a 3-legged roller: https://t.co/n9H2br1E2T , but it's not very good at walking and unstable/hard-to-control when rolling. I've settled on quad, Rob is going for hex - both are possible with the modular frame design we've settled on. Here's the hex variant:

and the quad version:

The quad has the advantage of being cheaper/simpler, but lacks a little on wow factor vs the hex.... it's also slightly easier to keep any sensor arrangement facing in the same direction for both walking and rolling.
Will probably post a discussion of sensor arrangements at some point, but for now the focus is on building a working prototype. Mk1 (demoed last wed at the hackspace) had full motion, but several of the leg joints weren't stiff enough. mk2 is printed and partially wired:
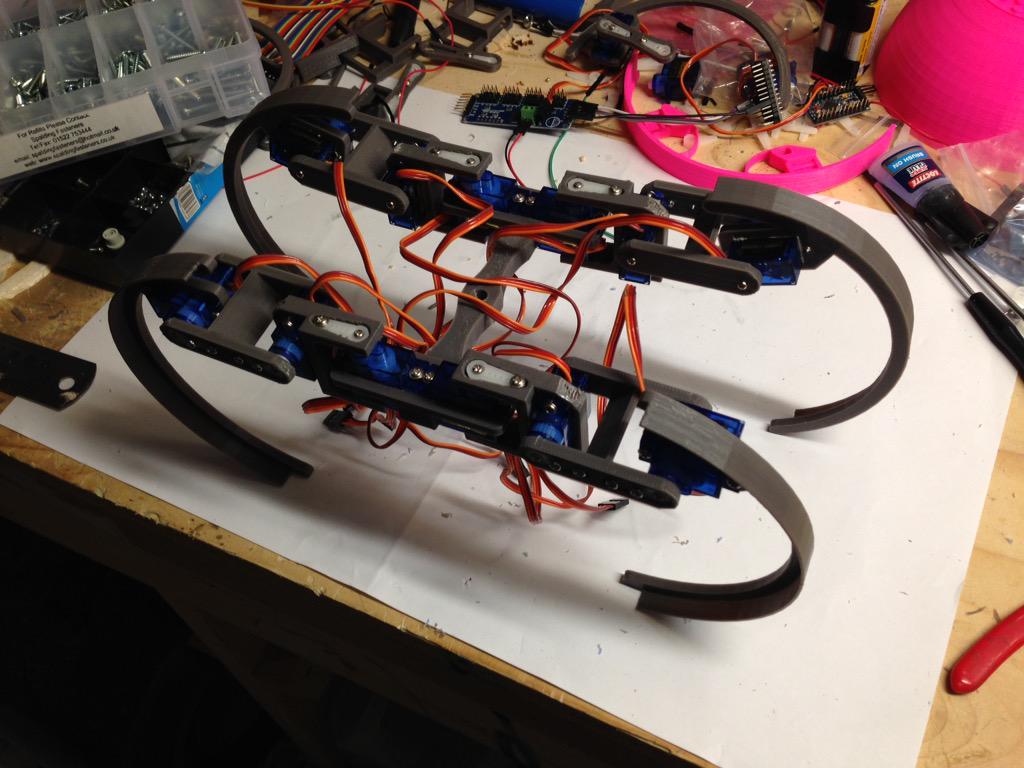
Wiring is tricky with this many servos, so for mk2, we're attempting to simplify things by merging power for each pair of legs:
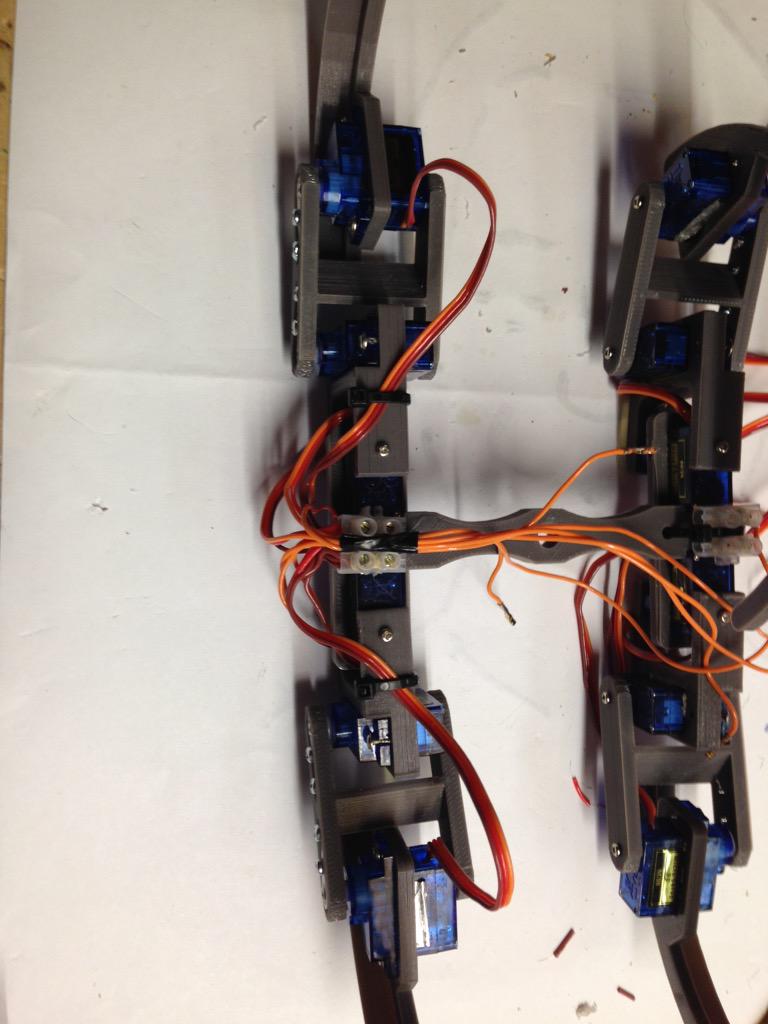
It seems to be working so far.
All hardware/software is on github as per usual: https://github.com/snhack/quadruloop
Everyone is welcome to get involved... or hang back until it either works or gets abandoned :)
If you want to build one, you'll need:
- 12x SG90 servos (or equiv)
- a 16-channel servo driver board
- an arduino (or similar) - I'm using a NodeMCU to get wifi control
- battery pack - I've gone for 2S 850mah LIPO
- regulator (depending on battery choice) - 6V max, 6A peak
Total cost is approx £40

Robert Longbottom
Oct 26, 2015, 7:15:20 PM10/26/15
to swindon-...@googlegroups.com
And not too far behind, here is the hex variant. Assembly finished, but no wiring done yet. I've at least checked that all the servos work. It's quite hard going to putting the legs together, lots of small screws and fiddling around with servo positions, which I expect I'll have to go back and adjust once I try to use it, but never mind! Looks like it should work. Wiring will have to wait for now...


Rob.
--
You received this message because you are subscribed to the Google Groups "swindon-hackspace" group.
To unsubscribe from this group and stop receiving emails from it, send an email to swindon-hacksp...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Gyrobot
Oct 27, 2015, 3:13:50 AM10/27/15
to swindon-hackspace
Looks great, I bet cable management gonna be tricky.
HexWars,, and not of the coding type....
Reply all
Reply to author
Forward
0 new messages