Choosing Telemetry Radio for GPS injection (Understanding baud rate to radio air data speed)
292 views
Skip to first unread message

Daniel Genova
May 30, 2018, 6:23:25 PM5/30/18
to swiftnav-discuss
Hi All,
I'm pretty unfamiliar with computer communications, so I was wondering if someone could help me chose what kind of radio (in terms of air data rates) is necessary for a Piksi Multi when injected into a Pixhawk?
My main confusion is relating baud rate to airspeed. According to the Swift integration into Pixhawk (link) it appears that the baud rate into the Pixhawk is 115,200.

However, the airspeed is only 64Kbits? Does this mean that all of the GPS data is not being sent through the radio? Does the baudrate of 57 to the radio telemetry mean that we aren't transferring all of the information?
Any guidance would be appreciated.

Hunter Mcclelland
May 31, 2018, 8:35:46 AM5/31/18
to Daniel Genova, swiftnav-discuss
Hello,
The Ardupilot system treats the Onboard Piksi as a GPS. So those two (the onboard Piksi and the Pixhawk/Ardupilot) talk to each other at 115200 via their connecting wires.
The Ground Station communicates with Ardupilot via a SiK radio. This communications link, between the ground station and the Pixhawk/Ardupilot, is completely separate from the previous 115200 one. Some information from the Ground Station Piksi is sent to Arduplane via this link (along with lots of other UAV data and commands) and Arduplane passes that to the Onboard Piksi so that it can compute an RTK fix.
Does that answer the questions?
Best,
-Hunter
--
You received this message because you are subscribed to the Google Groups "swiftnav-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to swiftnav-discuss+unsubscribe@googlegroups.com.
To post to this group, send email to swiftnav-discuss@googlegroups.com.
Visit this group at https://groups.google.com/group/swiftnav-discuss.
For more options, visit https://groups.google.com/d/optout.
Daniel Genova
May 31, 2018, 3:07:55 PM5/31/18
to swiftnav-discuss
Thanks for the response.
I guess my main question is why the baudrate from the flight controller to the radio (64K) is less than the baudrate from the GPS to the flight controller(115K)? If this baudrate is lower, does that mean we a truncating information from the GPS?
Looking around more I don't think this is the case. But I'm not super confident.
On Thursday, May 31, 2018 at 5:35:46 AM UTC-7, Hunter Mcclelland wrote:
Hello,The Ardupilot system treats the Onboard Piksi as a GPS. So those two (the onboard Piksi and the Pixhawk/Ardupilot) talk to each other at 115200 via their connecting wires.The Ground Station communicates with Ardupilot via a SiK radio. This communications link, between the ground station and the Pixhawk/Ardupilot, is completely separate from the previous 115200 one. Some information from the Ground Station Piksi is sent to Arduplane via this link (along with lots of other UAV data and commands) and Arduplane passes that to the Onboard Piksi so that it can compute an RTK fix.Does that answer the questions?Best,-Hunter
On Wed, May 30, 2018 at 6:23 PM, Daniel Genova <ddge...@ucdavis.edu> wrote:
Hi All,I'm pretty unfamiliar with computer communications, so I was wondering if someone could help me chose what kind of radio (in terms of air data rates) is necessary for a Piksi Multi when injected into a Pixhawk?My main confusion is relating baud rate to airspeed. According to the Swift integration into Pixhawk (link) it appears that the baud rate into the Pixhawk is 115,200.
However, the airspeed is only 64Kbits? Does this mean that all of the GPS data is not being sent through the radio? Does the baudrate of 57 to the radio telemetry mean that we aren't transferring all of the information?
Any guidance would be appreciated.
--
You received this message because you are subscribed to the Google Groups "swiftnav-discuss" group.
To unsubscribe from this group and stop receiving emails from it, send an email to swiftnav-discu...@googlegroups.com.
To post to this group, send email to swiftnav...@googlegroups.com.
Hunter Mcclelland
May 31, 2018, 3:28:02 PM5/31/18
to Daniel Genova, swiftnav-discuss
The answer to your question is "No. The difference in baudrate does not necessarily imply information is being truncated." Although you are right that there could be a connection between the two. I think the connection is best explained via an analogy.
The baud rate is a measure of the (lower-level) communication rate. For an analogy, you might think of it as how many words someone can speak in a 10[sec] period. (Maybe a fast talker can say 100 words, while a slow-talker could only say 20. Their baud rates are 10[words/sec] and 2[words/sec] respectively.)
The "information rate" (I don't know if that's a technical term?) is slightly different. In our analogy, that's how many words are actually said by the talker during a period.
Here's the key: The fast-talker might say 20 words in 2[sec], then remain silent for the next 8[sec]. So the fast-talker's "baud" rate is still 10[words/sec], because you had to listen at that frequency to understand her while she was speaking for those 2[sec], but her "information rate" averaged over the 10[sec] period is just 2[words/sec].
For the slow-talker, she would have to speak for the entire 10[sec] period to say all 20 words. Her baud rate is 2[words/sec] but her information rate is also 2[words/sec].
In summary, a slower baud rate does not necessarily mean that the information rate is any slower.
Does that help?
-Hunter
To unsubscribe from this group and stop receiving emails from it, send an email to swiftnav-discuss+unsubscribe@googlegroups.com.
To post to this group, send email to swiftnav-discuss@googlegroups.com.
Daniel Genova
May 31, 2018, 4:36:47 PM5/31/18
to swiftnav-discuss
Gotcha. That makes a lot of sense.
So do we know how much information/data is actually being sent by the Piksi multi? Is this something that can be found on the spec sheet? Or is this something that needs to be found experimentally?
This is because I want to make sure that I can select a telemetric device can send all of the information about the flight controller (IMU, barometer), GPS, and other peripherals all that the same time.
Thanks!
Hunter Mcclelland
May 31, 2018, 4:50:08 PM5/31/18
to Daniel Genova, swiftnav-discuss
Briefly: Yes, a communication line can be monitored to estimate how many actual bits (or bytes) are being sent, this is not especially hard. But it's probably not common enough to be provided on spec sheets.
I have two recommendations:
1) Hope one of the SwiftNav folks (or advanced users) listening to this discussion has that answer readily at hand! That would save you a lot of work. If not...
2) Try to figure out how to use/create some sort of communication-monitoring program to answer that question.
I'm not sure if you already made it clear... could you clarify whether you want the information-amount between the Ground Station Piksi and the UAV, or between the UAV Piksi and the UAV? (Or both?)
Best,
-Hunter
To unsubscribe from this group and stop receiving emails from it, send an email to swiftnav-discuss+unsubscribe@googlegroups.com.
To post to this group, send email to swiftnav-discuss@googlegroups.com.
Hunter Mcclelland
May 31, 2018, 4:54:53 PM5/31/18
to Daniel Genova, swiftnav-discuss
Oh, another thing occurred to me... you can probably configure the rate of various information messages (e.g. position information, barometer information, status updates, etc.) independently of the actual connection baud rate. So if you are "maxing out" your communication channel, you could either use a faster (baudrate-wise) channel, or just send information less frequently. (for example: just send status updates every 5 sec, rather than every 1 sec, using the same baud-rate connection)
This messaging-frequency does, of course, impact the maximum speed needed for your communication link.
-Hunter
Daniel Genova
May 31, 2018, 5:26:52 PM5/31/18
to swiftnav-discuss
I was initially just thinking the UAV/Piksi to the Ground Control Station. But I would also be interested in the Ground Piksi to the UAV.
Hunter Mcclelland
May 31, 2018, 5:37:18 PM5/31/18
to Daniel Genova, swiftnav-discuss
Ah, okay, not just the Piksi stuff, but all data transmitted between the UAV and the GCS. Someone from this discussion-group is less likely to have that on-hand.
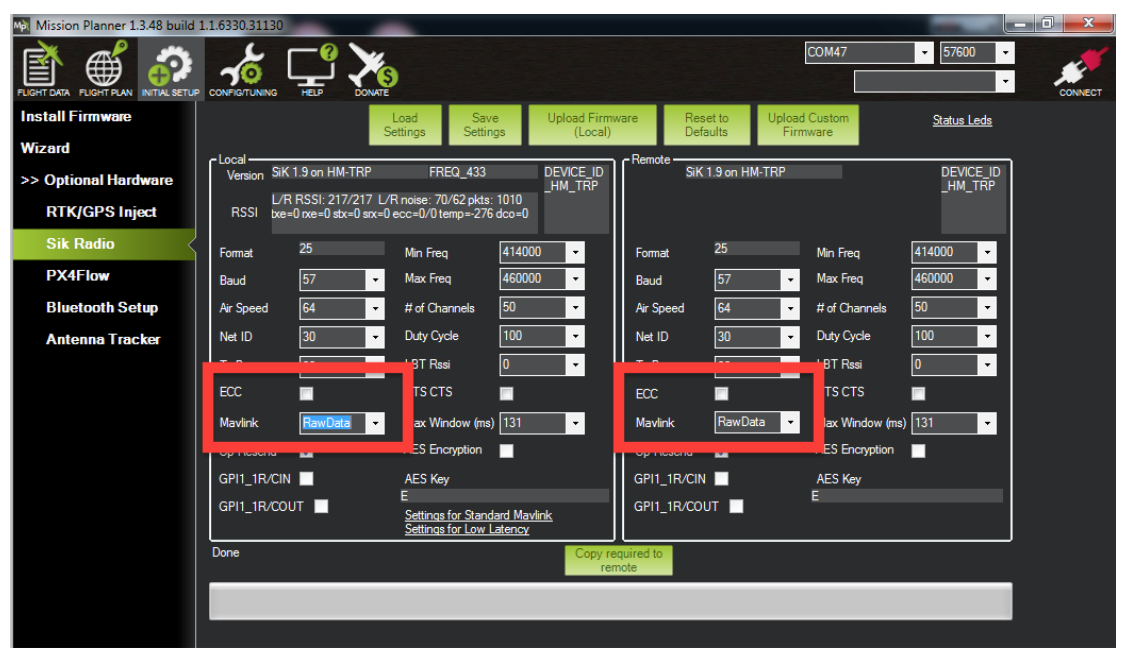
For that question, http://ardupilot.org/ would be the place to look. I recommend you look at "telemetry" and telemetry-log related information, as well as the details of what can be found in Mission Planner. If you can't find your answer, search the forums. If you still can't find how to go about it, you might post a question.
Best,
-Hunter
To unsubscribe from this group and stop receiving emails from it, send an email to swiftnav-discuss+unsubscribe@googlegroups.com.
To post to this group, send email to swiftnav-discuss@googlegroups.com.
Reply all
Reply to author
Forward
0 new messages