Tire forces responsible for bike stability
178 views
Skip to first unread message

Calvin Hulburt
Oct 10, 2014, 11:41:13 AM10/10/14
to st...@googlegroups.com
I am a retired engineer who now has time to build the bikes I've never had time to. I have been looking at road forces in order to analyze a frame using the forces of motion. This led me to an explanation of bicycle stability that I have not heard before. It goes like this: A stationary bike falls over because the camber forces hold the tires from moving sideways during the fall. When the bike is moving, they do not restrain the bike but instead, push it towards the fall. As we all know, a bike without steering will fall nonetheless. As the bike moves sideways, the direction of motion changes to include the side motion so that this vector points slightly toward the fall. When the plane of a wheel is at an angle to its direction of motion a slip angle forms. The consequent forces at both wheels are opposed to the camber force and the condition is the same as for a stationary bike. But the front wheel can turn, and because of the caster, it aligns with the direction vector and the front slip angle force goes to zero. The rear frame cannot align as quickly and so there is a steering moment about the yaw axis turning the bike into the fall. The camber force and the slip angle force are zero when the bike is upright and both increase with misalignment. I made a video to express the idea: https://www.youtube.com/watch?v=ONZM5RnGi1Q

Andrew Dressel
Oct 10, 2014, 4:25:44 PM10/10/14
to st...@googlegroups.com
A couple of points immediately come to mind.
2. Mathematical models of bikes with zero, and even slightly negative, trail (caster) predict self-stability and have been validated by physical testing
1. Mathematical models of bikes that neglect all tire properties, and simply require knife-edge wheels to roll in the direction they are pointed, have been validated with physical bikes that have pneumatic tires. Therefore, at the simplest level, bike stability can be explained without camber thrust or cornering force.
2. Mathematical models of bikes with zero, and even slightly negative, trail (caster) predict self-stability and have been validated by physical testing
Relevant papers describing these results can be found here:
Of course most bikes that people ride do have positive trail, and it does play an important role in handling and stability.
Also, real tires create moments in the contact patch that contribute to the net steering torque and so also influence handling and stability.
Date: Fri, 10 Oct 2014 08:41:13 -0700
From: mesaf...@gmail.com
To: st...@googlegroups.com
Subject: [stvdy] Tire forces responsible for bike stability
Date: Fri, 10 Oct 2014 08:41:13 -0700
From: mesaf...@gmail.com
To: st...@googlegroups.com
Subject: [stvdy] Tire forces responsible for bike stability
I am a retired engineer who now has time to build the bikes I've never had time to. I have been looking at road forces in order to analyze a frame using the forces of motion. This led me to an explanation of bicycle stability that I have not heard before. It goes like this: A stationary bike falls over because the camber forces hold the tires from moving sideways during the fall. When the bike is moving, they do not restrain the bike but instead, push it towards the fall. As we all know, a bike without steering will fall nonetheless. As the bike moves sideways, the direction of motion changes to include the side motion so that this vector points slightly toward the fall. When the plane of a wheel is at an angle to its direction of motion a slip angle forms. The consequent forces at both wheels are opposed to the camber force and the condition is the same as for a stationary bike. But the front wheel can turn, and because of the caster, it aligns with the direction vector and the front slip angle force goes to zero. The rear frame cannot align as quickly and so there is a steering moment about the yaw axis turning the bike into the fall. The camber force and the slip angle force are zero when the bike is upright and both increase with misalignment. I made a video to express the idea: https://www.youtube.com/watch?v=ONZM5RnGi1Q
--
You received this message because you are subscribed to the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this group and stop receiving emails from it, send an email to stvdy+un...@googlegroups.com.
To post to this group, send email to st...@googlegroups.com.
Visit this group at http://groups.google.com/group/stvdy.
For more options, visit https://groups.google.com/d/optout.
You received this message because you are subscribed to the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this group and stop receiving emails from it, send an email to stvdy+un...@googlegroups.com.
To post to this group, send email to st...@googlegroups.com.
Visit this group at http://groups.google.com/group/stvdy.
For more options, visit https://groups.google.com/d/optout.

Jason Moore
Oct 10, 2014, 4:43:58 PM10/10/14
to Single Track Vehicle Dynamics
There are many contributions to bicycle stability, both known and unknown. If you can create a very simple bicycle model that neglects elements that are known to effect stability and include the tire forces you describe, then you can test your theory. If you can show that these tire forces are a sufficient condition for bicycle stability that would be interesting. The tough thing about bicycle/motorcycle modeling is that it is very difficult to tease the system apart and discover the single mechanism that is the cause of the observed phenomena.
You could perhaps show that adding more complex tire models to the basic bicycle model makes it more or less stable.Andrew Dressel
Oct 10, 2014, 9:03:37 PM10/10/14
to st...@googlegroups.com, mesaf...@gmail.com
Dear Mesafarmer,
First, let me be the first to welcome you to the exciting and highly lucrative world of bicycle dynamics. Kiss your "retirement" goodbye.
Second, there are many theories about how bikes stay upright, as there are many (well mostly just two now) theories about how humans ended up on this planet.
In both cases, only one is predictive, testable, and has been confirmed by physical testing.
For bikes, the leading theory is that the front wheel is steered in the direction of the lean, either by the rider or by some combination of mass distribution, geometry, gyroscopic effects. This causes the wheel contact points to accelerate in the direction of the lean which generates a moment to counter the moment due to gravity and restore the bike to upright. This theory currently neglects the influence of real, pneumatic tires.
This theory is encapsulated in the equations of motion published here: http://ruina.tam.cornell.edu/research/topics/bicycle_mechanics/*FinalBicyclePaperv45wAppendix.pdf
This theory predicts weave frequencies that have been confirmed by physical testing here: http://bicycle.tudelft.nl/schwab/Bicycle/Kooijman2006.pdf
This theory predicts that a bike with the right geometry and mass distribution can be self stable even with negligible gyroscopic effects and slightly negative trail, all which have been confirmed by physical testing here: http://bicycle.tudelft.nl/stablebicycle/
This theory is encapsulated in the leading motorcycle dynamic models, such as FastBike at http://www.dinamoto.it/, and the proof that both models are in agreement can be found here: https://pantherfile.uwm.edu/adressel/www/publications/DETC2011-47344.pdf
None of this proves that this theory is the truth, but it does make all the other theories second-rate, at best.
As Jason suggests, this is still a young and exciting field just waiting for you to prove us all wrong. I am actually actively (if once in while can be counted as "actually") trying to measure and model the mechanical properties of bicycle tires in order to better understand the role they play. Nothing would be more exciting for the work I do than for you to prove that tire properties are what keep a bike upright, but I am highly skeptical.
Sincerely,
Andrew Dressel
ps. how are your mesas doing in the current drought conditions?
Date: Fri, 10 Oct 2014 08:41:13 -0700
From: mesaf...@gmail.com
To: st...@googlegroups.com
Subject: [stvdy] Tire forces responsible for bike stability
I am a retired engineer who now has time to build the bikes I've never had time to. I have been looking at road forces in order to analyze a frame using the forces of motion. This led me to an explanation of bicycle stability that I have not heard before. It goes like this: A stationary bike falls over because the camber forces hold the tires from moving sideways during the fall. When the bike is moving, they do not restrain the bike but instead, push it towards the fall. As we all know, a bike without steering will fall nonetheless. As the bike moves sideways, the direction of motion changes to include the side motion so that this vector points slightly toward the fall. When the plane of a wheel is at an angle to its direction of motion a slip angle forms. The consequent forces at both wheels are opposed to the camber force and the condition is the same as for a stationary bike. But the front wheel can turn, and because of the caster, it aligns with the direction vector and the front slip angle force goes to zero. The rear frame cannot align as quickly and so there is a steering moment about the yaw axis turning the bike into the fall. The camber force and the slip angle force are zero when the bike is upright and both increase with misalignment. I made a video to express the idea: https://www.youtube.com/watch?v=ONZM5RnGi1Q

William Patterson
Oct 11, 2014, 1:00:08 AM10/11/14
to st...@googlegroups.com
We have tried a totally different approach. By studying the force feedback through the handlebars, we could predict responsiveness and sense of roll angle.
--
Ride your bike to go somewhere. Don't go somewhere to ride,
http://www.calpoly.edu/~wpatters/
http://www.recumbents.com/wisil/trail.asp
A stable bike would be an unresponsive slug. Handling qualities may be a better approach.
Bill Patterson
Prof emeritus CALPOLY SLO
Dear Mesafarmer,Let me try a different tack.
First, let me be the first to welcome you to the exciting and highly lucrative world of bicycle dynamics. Kiss your "retirement" goodbye.Second, there are many theories about how bikes stay upright, as there are many (well mostly just two now) theories about how humans ended up on this planet.In both cases, only one is predictive, testable, and has been confirmed by physical testing.For bikes, the leading theory is that the front wheel is steered in the direction of the lean, either by the rider or by some combination of mass distribution, geometry, gyroscopic effects. This causes the wheel contact points to accelerate in the direction of the lean which generates a moment to counter the moment due to gravity and restore the bike to upright. This theory currently neglects the influence of real, pneumatic tires.This theory is encapsulated in the equations of motion published here: http://ruina.tam.cornell.edu/research/topics/bicycle_mechanics/*FinalBicyclePaperv45wAppendix.pdfThis theory predicts weave frequencies that have been confirmed by physical testing here: http://bicycle.tudelft.nl/schwab/Bicycle/Kooijman2006.pdfThis theory predicts that a bike with the right geometry and mass distribution can be self stable even with negligible gyroscopic effects and slightly negative trail, all which have been confirmed by physical testing here: http://bicycle.tudelft.nl/stablebicycle/This theory is encapsulated in the leading motorcycle dynamic models, such as FastBike at http://www.dinamoto.it/, and the proof that both models are in agreement can be found here: https://pantherfile.uwm.edu/adressel/www/publications/DETC2011-47344.pdfNone of this proves that this theory is the truth, but it does make all the other theories second-rate, at best.As Jason suggests, this is still a young and exciting field just waiting for you to prove us all wrong. I am actually actively (if once in while can be counted as "actually") trying to measure and model the mechanical properties of bicycle tires in order to better understand the role they play. Nothing would be more exciting for the work I do than for you to prove that tire properties are what keep a bike upright, but I am highly skeptical.Sincerely,Andrew Dressel
ps. how are your mesas doing in the current drought conditions?
Date: Fri, 10 Oct 2014 08:41:13 -0700
From: mesaf...@gmail.com
To: st...@googlegroups.com
Subject: [stvdy] Tire forces responsible for bike stability
I am a retired engineer who now has time to build the bikes I've never had time to. I have been looking at road forces in order to analyze a frame using the forces of motion. This led me to an explanation of bicycle stability that I have not heard before. It goes like this: A stationary bike falls over because the camber forces hold the tires from moving sideways during the fall. When the bike is moving, they do not restrain the bike but instead, push it towards the fall. As we all know, a bike without steering will fall nonetheless. As the bike moves sideways, the direction of motion changes to include the side motion so that this vector points slightly toward the fall. When the plane of a wheel is at an angle to its direction of motion a slip angle forms. The consequent forces at both wheels are opposed to the camber force and the condition is the same as for a stationary bike. But the front wheel can turn, and because of the caster, it aligns with the direction vector and the front slip angle force goes to zero. The rear frame cannot align as quickly and so there is a steering moment about the yaw axis turning the bike into the fall. The camber force and the slip angle force are zero when the bike is upright and both increase with misalignment. I made a video to express the idea: Bicycle Steering 101
--
You received this message because you are subscribed to the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this group and stop receiving emails from it, send an email to stvdy+un...@googlegroups.com.
To post to this group, send email to st...@googlegroups.com.
Visit this group at http://groups.google.com/group/stvdy.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this group and stop receiving emails from it, send an email to stvdy+un...@googlegroups.com.
To post to this group, send email to st...@googlegroups.com.
Visit this group at http://groups.google.com/group/stvdy.
For more options, visit https://groups.google.com/d/optout.
--
Ride your bike to go somewhere. Don't go somewhere to ride,
http://www.calpoly.edu/~wpatters/
http://www.recumbents.com/wisil/trail.asp
Calvin Hulburt
Oct 11, 2014, 12:36:36 PM10/11/14
to st...@googlegroups.com
According to Kooijman et al, bicycles are barely stable, if at all. The reason is the Whipple model does not reflect an actual bicycle. The premise of Whipple is that the bicycle is steered into a fall. Steering is assumed to be a rotation of the steering axis so that some steer angle can correct a lean angle. This idea has been floating about for as long as I can remember and the question left to determine is "What force steers the front wheel into the fall?" The question is a loaded one like "Have you quit beating your wife?" It involves an assumption that does not allow a correct answer. The truth is that the bicycle does not steer in that manner. The front wheel is not a leader, it is a follower. The Whipple idea is that the rider steers the bike into the fall. This means he or she would turn the handlebars and a slip angle at the front tire will create a force and a positive moment about the yaw axis. That is not how the steering moment is generated for self stability. When the bike tips, the direction of motion swings toward the tip and the front tire follows because of the slip angle. The rear tire is pinched between a camber force and the slip angle force while the front tire has a camber force unobstructed by a slip angle force so a steering moment rotates the bike about the yaw axis into the fall. Normally, the camber forces are balanced and cannot cause a turning moment, so this turning moment is equal to the product of the rear slip angle force and a moment arm. The current notion of a bicycle is that the front wheel directs the action when actually it is compliant.
I have seen too many cases of math models giving positive results while not reflecting the intended device. With Whipple the bike will be stable with some positive steering but the limited results in the above cited paper say to me that the important mechanism of stability is missing. The only demonstration I have seen in which tire forces were eliminated may be the tricycle experiment that Ruina did. Without tire forces it would not steer. When you consider that the front wheel is only working to keep the slip angle to zero, it is not surprising that a design with slightly negative trail will stay upright. First, the slip angle force does not act at the center of the contact, but behind it and every tire also has a self aligning moment. Add to that the steering weight and optimized dynamic response and the bike should work because the rear tire is still there to steer.
--
You received this message because you are subscribed to a topic in the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/stvdy/SNBCdBT2szo/unsubscribe.
To unsubscribe from this group and all its topics, send an email to stvdy+un...@googlegroups.com.
Calvin Hulburt
Oct 11, 2014, 1:02:23 PM10/11/14
to st...@googlegroups.com
Hi Jason,
At one time, I did make a model using QuickBasic and included four degrees of freedom. The program generated a top view of the bicycle as it travelled across a football field. I kept it simple as possible but included gyroscopic terms. I would perturb it by giving it an angle of lean. It wouldn't take a lot and sometimes it would end up in a spiral. I just came across a paper where the researcher used tire forces and Whipple. He showed a Logarithmic spiral outcome. My 486 now has a dead battery on the motherboard so I'm considering whether I could revive the program using Excel. The only additions to the model I might add is the relaxation length which I think is on the order of a foot.
--
You received this message because you are subscribed to a topic in the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/stvdy/SNBCdBT2szo/unsubscribe.
To unsubscribe from this group and all its topics, send an email to stvdy+un...@googlegroups.com.
Calvin Hulburt
Oct 11, 2014, 1:40:38 PM10/11/14
to st...@googlegroups.com
Hi Andrew,
Thank you for the welcome. I remember visiting a science museum around 1980 and interacting with a display. I stood on a lazy susan and held a spinning bicycle wheel. I could rotate myself by tipping the wheel. Great fun. The description explained gyroscopes and then boldly stated this is the reason for bicycle stability. I was in a human power vehicle club at the time and at the next meeting I ran into a fellow who said he worked at the very same museum. I mentioned the error in the declaration I had seen and was met with a cold retort along the lines of "it is too." I feel gratified that I have received considered criticism instead of such a response.
I applaud your skepticism. It is the right mindset for all ideas, not just new ones. I really debated with myself about putting this idea out here because I am beginning to really enjoy retirement and I know from past experience that there are beliefs in this area more tightly held than any other religion. Still, I feel a need to discuss the idea with those who can understand the limitations and origins of what is reported as truth. In my experience as an engineer, most things work in simple direct ways and through time enhancements occur. However, in a atmosphere of no definitive explanation, phantoms happen.
The drought in New Mexico seems to be a permanent shift in climate. We did have a wet fall last year that gave us some subsoil moisture that made this year quite nice.
--
You received this message because you are subscribed to a topic in the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/stvdy/SNBCdBT2szo/unsubscribe.
To unsubscribe from this group and all its topics, send an email to stvdy+un...@googlegroups.com.

Arend Schwab - 3ME
Oct 11, 2014, 2:02:46 PM10/11/14
to st...@googlegroups.com
Hi Calvin,
Arend Schwab here, one of the co-authors on the bicycle papers.
I'm sorry to say but, when selfstable, the bicycle does steer into the fall by itself. Please read the 2011 Science paper. In the supplementary material we show a math proof on the Whipple model of it. So it's in the Whipple model. Without tires.
J. D. G. Kooijman, J. P. Meijaard, Jim M. Papadopoulos, Andy Ruina, A. L. Schwab, 2011 ``A bicycle can be self-stable without gyroscopic or caster effects,'' Science 15
April 2011, 332(6027):339-342. doi:10.1126/science.1201959,paper
and supporting material: http://bicycle.tudelft.nl/stablebicycle/
And experiments confirm this.
Kooijman, J. D. G., Schwab, A. L., and Meijaard, J. P. (2008). ``Experimental validation of a model of an uncontrolled bicycle,'' Multibody
System Dynamics 19(1-2):115-132. pdf(588k)
This does not mean that, in some cases, tires can play an important role. But they are not the main character in this play.
Yours,
-Arend L. Schwab
06 2852 7539
Calvin Hulburt
Oct 11, 2014, 7:36:42 PM10/11/14
to st...@googlegroups.com
Hi Arend,
I remember a joke in an engineering magazine that went something like; the model worked great but the product was crap so we trashed the product and sold the model. I didn't think it was funny either. Especially since I was trying to model film thickness between a reciprocating shaft and a seal at the time and it was hard to justify.
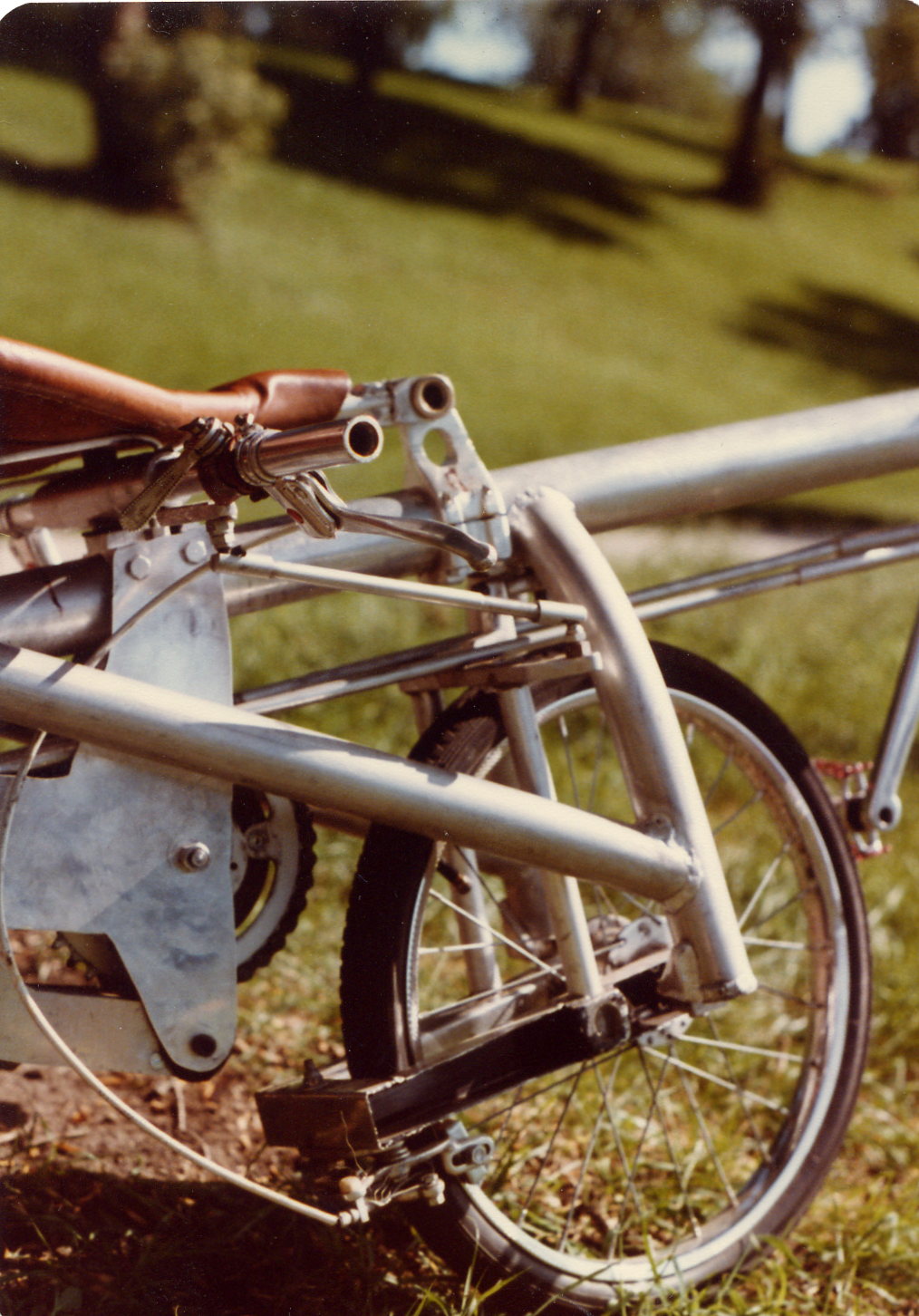
I have read the paper and it seems to me that the model is far too sensitive to small changes. A specific example from the paper: "For example, we have found bicycles with gyroscopic wheels and positive trail that are not stable at any speed (Ch S6.3)" I looked at the supporting documents and found that the only change was a shift in the location of the forward mass center from in front of the steering axis to behind it. This is no enough to change the nature of a bicycle. I'm attaching (I hope) a picture of a bike I built in the seventies to test drive ideas with. The front wheel is hub steering with the axis at the center of the hub. You will notice that both the brake caliper and the steering arm are behind the axis. This bike was easily ridden.
Jason Moore
Oct 11, 2014, 8:29:49 PM10/11/14
to Single Track Vehicle Dynamics
Calvin,
It is important to point out that "easily ridden" does not equate to "self-stability". None of the claims made by Andrew, Arend, or I in this thread have anything to do with whether a bicycle is easily ridden or not. We've only really said things about bicycles without riders so far. And yes, moving the location of the center of mass of the front frame of a bicycle is definitely enough to change the dynamics of the bicycle (real life or in a model). That is one of the key findings expressed in the Science paper, i.e. changes to mass distribution can have great affect on the bicycle's uncontrolled dynamics. Your statement "... This is no(t) enough to change the nature of a bicycle." is unfounded.
It is important to point out that "easily ridden" does not equate to "self-stability". None of the claims made by Andrew, Arend, or I in this thread have anything to do with whether a bicycle is easily ridden or not. We've only really said things about bicycles without riders so far. And yes, moving the location of the center of mass of the front frame of a bicycle is definitely enough to change the dynamics of the bicycle (real life or in a model). That is one of the key findings expressed in the Science paper, i.e. changes to mass distribution can have great affect on the bicycle's uncontrolled dynamics. Your statement "... This is no(t) enough to change the nature of a bicycle." is unfounded.

andy ruina
Oct 12, 2014, 10:21:44 AM10/12/14
to st...@googlegroups.com
Calvin: Oct 12, 2014
It is interesting to me to see Arend, Jason, Andrew and implicitly a few other co-authors
and close colleagues, treated as the old-guard, the conservative fuddy-duddies, the ones
with closed minds.
All of us, the people above, got into this business because we had much of the psychology
that you now have, complaining about the conservative people who acted like they knew
what they were talking about but clearly did not know.
I think you will find a difference with "us" though. For example, we understand pretty well,
ok not that well, but better than any others before us, what makes a bike self-stable.
OK, we don't know much about how tire models effect this. Still we know some.
But the key thing I think you will see in the emails people have been sending is that they
also point out the boundaries of their knowledge. For example, none of us know, or claim
to know, what it is about a bike that makes it nice to ride for this or that rider. We
all have opinions and intuitions about it, but in terms of real knowledge, like "would
changing parameter x from value y to value z have a desirable effect?" We don't know.
Some things we do know, however:
a) Uncontrolled stability is subtle, depending in complicated ways on many parameters.
b) The relation between uncontrolled stability and what people can ride is unknown and,
it seems, barely existent. People can ride all kinds of things.
c) Similarly for what people like to ride.
Taking this whole email into account, along with that some of the people who are writing
are smart, open-minded, hard working and have been thinking about this problem for a while,
perhaps you might reconsider thinking of them/us as rigid old fuddy-duddy close-minded
hard liners.
Andrew Dressel
Oct 12, 2014, 12:28:15 PM10/12/14
to st...@googlegroups.com
Dear Calvin,
I apologize for not noticing your name in your initial post. All I saw was your email address, and went with that. I meant no disrespect.
Now that I have your name, I can search on Google and find you explaining your theory on wordpress, http://mesafarmer.wordpress.com/, on youtube, http://www.youtube.com/watch?v=pj1bRXOHkLQ and https://www.youtube.com/watch?v=ONZM5RnGi1Q, and even in the comments in response to articles related to bicycle dynamics, such as http://news.sciencemag.org/physics/2014/03/bicycle-tricycle-hybrid-counteracts-gravity
I suspect that you are the anonymous editor that has been inserting similar descriptions into the Wikipedia article on bike dynamics from time to time for the past couple of years,
https://en.wikipedia.org/wiki/Special:Contributions/209.188.117.240, and I am one of the editors that has reverted your changes there for the simple reason that wikipedia has very clear rules about original research and reliable sources. That simply is not the forum for promoting new ideas.
This forum, however, is a great place for this discussion, so let's give it a try. It seems to me that your theory is based on a couple key assertions:
1. tire forces, both camber and slip, are what steer the front wheel into the direction of a lean, either alone, or at least predominately.
"the combination of these two motions is a new vector at some small angle to the old straight ahead position. The front wheel has a degree of freedom the rear does not have. It can pivot and the trail causes the wheel to align with the direction of motion."
2. it is not the steering of the front wheel that causes a bike to yaw, but tire forces on the rear wheel.
"the rear wheel side force creates a steering moment that rotates the bike about its vertical axis"
These assertions beg a couple of questions:
1. Is the difference in self-stability between different bikes then due solely to their different tires? Could we take the tires from a bike that is self-stable and install them on a bike that is not to cause the second bike to become self-stable? Are there other factors a play? Will the self-stability of a bike also depend on trail, steering axis angle, gyroscopic effect, or mass distribution? My Burley recumbent is decidedly not self-stable, and I suspect that the long stem that projects rearward from the steering axis to the handlebars plays a big role in that. When stationary, which I realize is a special case, the mass of the handlebars causes the front wheel to steer sharply opposite the direction of the lean. Are you suggesting that different tires could correct this?
2. Is the rear wheel responsible for yawing the bike only at high speed and/or small steer angles? Surely when I am riding very slowly and turn very sharply while keeping the bike mostly vertical, the steer angle of the front wheel is responsible for most of the yawing, right?
I guess it all boils down to this: can your theory make predictions, and can we perform tests that would confirm those predictions? As I have tried to demonstrate, the theory that the front wheel is steered in the direction of the lean, either by the rider, or by some combination of mass distribution, geometry, and gyroscopic effects, has made several testable predictions that have been subsequently validated by physical experimentation. As more and better experiments and analyses are performed, it appears that there may be some small discrepancies between the predictions and the results, and one idea for the source of these discrepancies is tire mechanics, hence our tire testing. Other possible sources of these discrepancies include measurement error, air drag, bearing friction, frame flex, etc.
So, have I understood your theory correctly, and can your theory make predictions that we can test?
Sincerely,
Andrew Dressel
Date: Fri, 10 Oct 2014 08:41:13 -0700
From: mesaf...@gmail.com
To: st...@googlegroups.com
Subject: [stvdy] Tire forces responsible for bike stability
I am a retired engineer who now has time to build the bikes I've never had time to. I have been looking at road forces in order to analyze a frame using the forces of motion. This led me to an explanation of bicycle stability that I have not heard before. It goes like this: A stationary bike falls over because the camber forces hold the tires from moving sideways during the fall. When the bike is moving, they do not restrain the bike but instead, push it towards the fall. As we all know, a bike without steering will fall nonetheless. As the bike moves sideways, the direction of motion changes to include the side motion so that this vector points slightly toward the fall. When the plane of a wheel is at an angle to its direction of motion a slip angle forms. The consequent forces at both wheels are opposed to the camber force and the condition is the same as for a stationary bike. But the front wheel can turn, and because of the caster, it aligns with the direction vector and the front slip angle force goes to zero. The rear frame cannot align as quickly and so there is a steering moment about the yaw axis turning the bike into the fall. The camber force and the slip angle force are zero when the bike is upright and both increase with misalignment. I made a video to express the idea: https://www.youtube.com/watch?v=ONZM5RnGi1Q
andy ruina
Oct 12, 2014, 3:29:08 PM10/12/14
to st...@googlegroups.com
Dear Calvin: Oct 12, 2014
My guess is that you have lots of good intuitions. My further guess is that you would have much to learn from slowly digesting the email from Andrew Dressel below who, at least speaking for myself, beautifully expresses the ideas
held by the "authorities" you question.
When we got into this, some of us were railing against David Jones Trail theory of stability.
I said, "if were are successful in our publications people will stop listening to Jones". What
I didn't think through, is that cynics, questioning people analogous to ourselves, would,
like you, start railing against _us_!
Anyway, why don't you take up Andrew's challenge and see if you could make a testable prediction?
No need to make the test, to start with, we could just test the idea.
For example, in my reading, it seems like you think one could make a self-stable bicycle that
had the steering locked. Do you think that?
Calvin Hulburt
Oct 12, 2014, 3:59:47 PM10/12/14
to st...@googlegroups.com
Thank you all for the kind words and an opportunity to state my case. I so often find the argument against my ideas is, you are wrong because here is the correct theory, tested, checked and published. I am coming from an engineering perspective: This is how it looks to me:
The mathematical model of a bicycle contains the dynamic response of the bike much like an RLC circuit will have a frequency response. The circuit can be driven by some time varying voltage and you will get some specific output. I'm sure the model being used contains carefully considered parameters and gives meaningful results when you vary such things as mass distribution, rake, trail, wheelbase and such. What I see is wrong is the force matrix. The important one is missing and this magnifies the importance of the minor players. Any positive steering moment seems to be enough to make the equations stable and without angular momentum or weight in front of the steering axis there is no stability. Here I see a problem that Jason has raised. Does lack of stability mean the bike cannot be ridden? I'd say no. Back when, I knew a guy who wanted to build a recumbent with front wheel drive and rear wheel steering. It makes for a nice layout and good weight distribution. To test rear wheel steering, he built a seat over the handlebars of an old coaster bike and set it up to ride backwards. Clearly unstable, but he could after much practice ride it around the parking lot. To me, stability is tending to return upright. The ambiguity of something being unstable yet easily ridden will disappear when the model reflects the bicycle.
We are considering single track vehicles which includes motorcycles, bicycles and ski bikes. I will never ride a motorcycle at 200mph but there are those who do and take it for granted that the bike will not suddenly fall over. There is a very clear feeling on a motorcycle that it will not fall over even when you perturb it. A bicycle is slower but communicates the same feeling. I have laid out the forces of self stability but understand that I am not claiming you don't steer at slow speeds to override or augment what the bike is doing. Sometimes, I like to hold myself as still as possible and lightly hold the bars while riding slowly. I usually find myself steering a little more or less in the same direction as the bike.
Andrew, you raise so many questions, that I hope I address them all. First, The steering moment is a function of the rear slip angle, however, if the bike is leaning, the camber force at the front will steer the bike. Because the front wheel continues to minimize the front slip angle, the front camber force pushes the bike into the fall while the rear tire is held from side motion by opposing forces. The moment, however is still equal to the distance to the center of mass and the rear slip angle force. If the bike is mostly upright, slip angle forces could deal with some small side force.
The camber force is the product of the lean angle and the normal force at the wheel and is not tire dependent. While all tires have similar slip angle properties, they have different coefficients. If a bike is truly unstable, I doubt a change in tires would make a difference. On the other hand, sport motorcycles are now equipped with some extremely wide rear tires and width is one thing that increases the slip angle coefficient. Changing the tires may improve stability but so may changes in wheelbase, rake, trail and changes in center of mass location.
If a bicycle is built with both front and rear steer axis and both have trail, the steering moment would not develop and the bike would not be a stable bike. Another thought would be to take a regular bike and change the back wheel from a large wide tire to a small thin one. It wouldn't destroy stability but might reduce it enough to be measureable.
One of the things Jones did, was push a bike backwards and had that stayed upright, I wouldn't be making this explanation.
--
You received this message because you are subscribed to a topic in the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/stvdy/SNBCdBT2szo/unsubscribe.
To unsubscribe from this group and all its topics, send an email to stvdy+un...@googlegroups.com.
andy ruina
Oct 12, 2014, 4:23:45 PM10/12/14
to st...@googlegroups.com
Calvin: Oct 12, 2014
We all seem to agree then, that self-stability and controllability-by-a-human are two
different things. There is no paradox that they are different. They just are
different. Lots of systems that are unstable can be stabilized with control.
And a human riding a bicycle is a controller.
When I read your email below, I have trouble knowing which you are making claims
about, self-stability or controlled stability.
Even if you can't name a precise experiment to test your theory, maybe you could
make a precise statement of what you are saying. I get lost reading your writing.
Some questions for you:
Do you think a bike with locked steering can be self-stable, or even balanced
by a person, due to the tire effects you discuss?
In what way does including tire slip (as opposed to perfect-no-slip rolling in
most of our models) change the stability of either a controlled or passive
bicycle, do you think?
For example, at low speeds on flat smooth ground do you think that the
side slip of a narrow 120 PSI tire is important? Or might a perfectly
rolling knife-edge wheel capture the dynamics pretty accurately?
Is it possible that you think the following: Side force in a tire
only comes from slip in the same way that lift on a wing only comes
from angle of attack. So having no side slip prevents thinking
of a side force? If so, this doesn't show understanding of the
limiting case of pure rolling. As that limit is approached, the
slip angle becomes negligible and can thus be neglected. You
could think of it like this: As a tire gets stiffer and stiffer
the slip gets arbitrarily small. Even though it is always there,
the side slip becomes negligible if the tire is very stiff.

Peter de Lange
Oct 12, 2014, 4:34:55 PM10/12/14
to st...@googlegroups.com
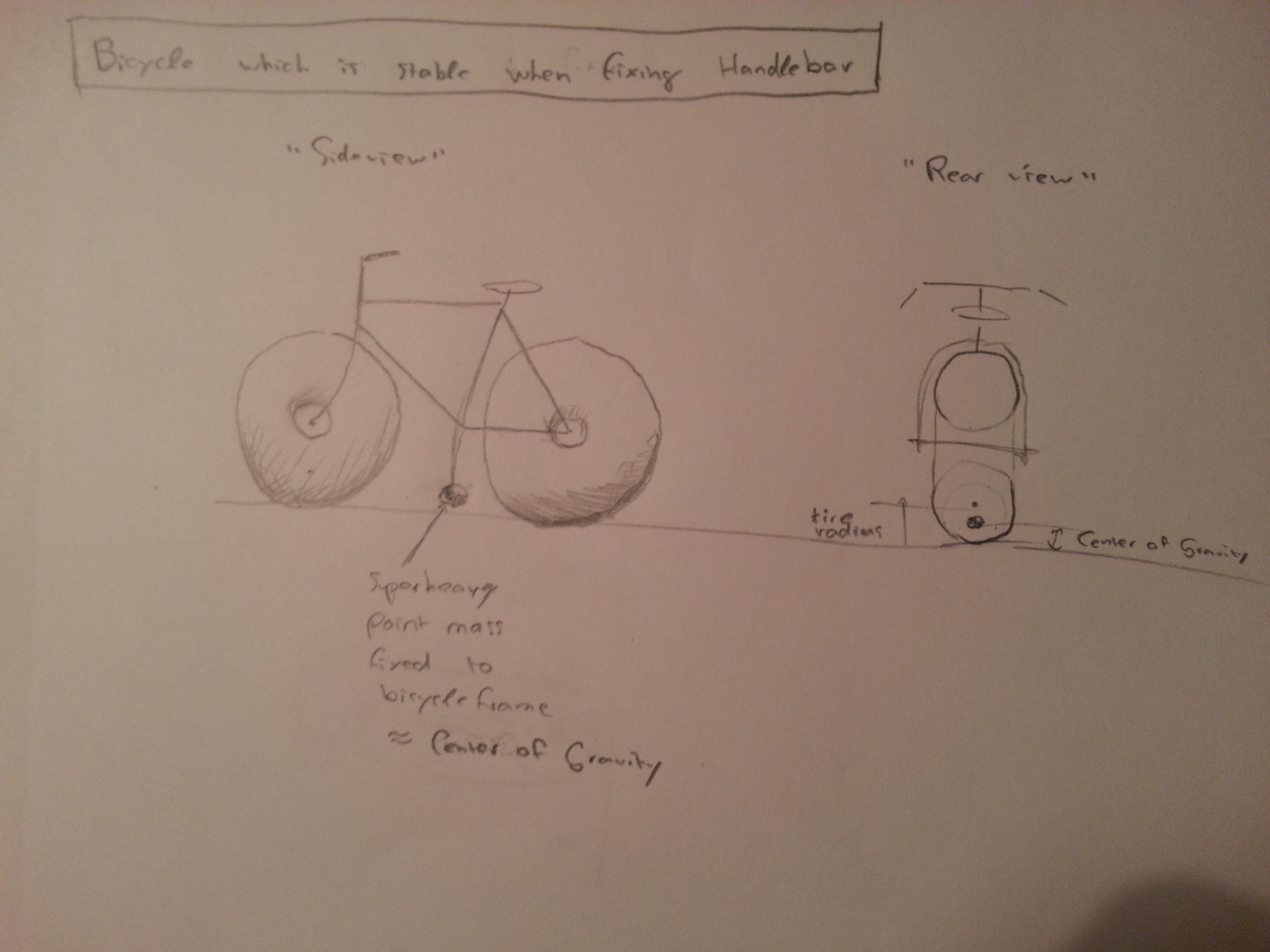
Challenge accepted ;) Below I present what I think is a self-stable bicycle even when the steering is locked. Unlike the Whipple model this bicycle features torus shaped wheels but is a bicycle nevertheless imo.
see attachment
andy ruina
Oct 12, 2014, 5:16:17 PM10/12/14
to st...@googlegroups.com
Peter: Oct 12, 2014
About your self-stable bike with locked steering.
That's what I call a bizarre extreme. I use it in my talks as such.
Here's a pic of a real bike with that property (from Richard Klein):

I don't think this is what Calvin is talking about!
<20141012_222527.jpg>
Calvin Hulburt
Oct 13, 2014, 4:05:47 PM10/13/14
to st...@googlegroups.com
I do not think a bike can stay upright without steering. Lateral tire forces are zero when a bike is upright and the bikes motion vector is aligned with the frame. When something falls over and is restrained at the base, the angular acceleration is proportional to the angle of rotation. So if a bike is upright and starts to tip, it does so rather slowly. At the same time, the camber force is also a function of the angle and quite small when the bike is near vertical. When at 45 degrees these forces can provide acceleration equal to the weight of the bike. Now there is a whole discussion about how bikes are now cornering at much greater angles and is it because there is a friction coefficient greater than one. I don't know. My point is that the camber force is big, increases with lean, and goes to zero at zero lean angle. So there is a restorative force similar to gravity for a regular pendulum. When a bike tips the camber force pushes the bike in the direction that it is falling. The camber force, however, cannot generate a turning moment by itself because moving the center of mass so that there is more weight on the front wheel or back wheel also changes the moment arm and camber force will only move the bike to the side. I think that rake may bias it slightly to the front because when a raked front end is steered the camber angle increases slightly but for this discussion a vertical steering axis is simpler.
So the bike began to tip and camber pushed the bike to that side. The bike is moving sideways and forward so the actual direction of motion is not aligned with the frame but is at some small angle to the frame toward the side to which it began to tip. Most people I have talked to understand a slip angle as something you generate when you steer, You do this by turning the plane of the wheel at an angle to the direction of motion. The notion of angle of attack is valid because the tire can be replaced by a skate or ski or maybe even a hydrofoil and these vehicles will act much as a bicycle with wheels. Of course, there is differences in coefficients and angular momentum but in general tires are not needed. In any case, steering is generally thought of as turning the wheel to create a side force to alter the direction. Here is a case where the direction vector changes in relation to the wheel and a slip angle is formed. The bike tips to the right, camber forces push the bike right. Slip angles form at both wheels. Because the direction of motion is angled to the right but the wheels are still pointed straight ahead, both slip angle forces point to the left. This is where steering becomes necessary. The camber forces are opposed by the slip angle forces. The contact points would be held laterally and the bike would fall over as in the stationary case if it were not for the front steering axis. The front wheel is pushed into alignment by the slip angle force so that the front wheel automatically aligns with the direction of motion. The front slip angle force allows the front wheel to hunt for the vehicles direction. In doing this the slip angle force goes to zero and the camber force is no longer opposed. The camber force at the front can then push the front of the bike toward the fall. The back wheel cannot reduce the slip angle by steering so it is pinched between the camber force and the slip angle force. The back wheel is near the center of the yaw rotation as the bike steers into the fall. The camber forces cannot by themselves create a yawing moment so no matter how the moment acts on the bike, it is equal to the product of the rear slip angle force and the rear wheel to center of mass length.
I know this is not easy to visualize so let me just say that in no way am I suggesting that you do not need a steering axis. I will point out, as well, that the rider has the ability to destabilize the bike at any time simply by leaning and preventing the front wheel from turning. The bike will then begin to fall to that side because of the bias provided and the opposing forces at the contact points. The rider can, of course recover by allowing the tire forces to bring him or her upright.
It is like riding a bicycle, you never forget, or something along those lines is a common refrain. I think the big reason you can pick up bike riding so easily is that the bike never forgets and that learning to ride in the first place is learning to not grip the bars to tightly and trust the vehicle. A good bike is an extension of your body. You can influence its motion in so many ways. You can change the moment of inertia about the roll axis by standing up, you can yaw the bike with a twist of your body. You can lean and twist and dance on two wheels. You can't do that on a Whipple bike.
--
You received this message because you are subscribed to a topic in the Google Groups "Single Track Vehicle Dynamics" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/stvdy/SNBCdBT2szo/unsubscribe.
To unsubscribe from this group and all its topics, send an email to stvdy+un...@googlegroups.com.
andy ruina
Oct 13, 2014, 4:14:33 PM10/13/14
to st...@googlegroups.com
Calvin: Oct 13, 2014
So, below, you say:
The tire forces you are interested in are not enough to balance a bicycle.
But, through their effect on steering they can balance a bicycle.
Are you saying that the primary cause of bicycle balance, both uncontrolled
and controlled, is through the effect of your tire forces on steering?
Or just for one of these two cases? Which one?
Let's narrow it down to something that we could, at least in principle,
settle.
I don't want to dismiss you, as you have great intuitions and energy.
But do you know the line: "Not even wrong"?
That is where things stand now, at least in my mind.
On Oct 13, 2014, at 4:05 PM, Calvin Hulburt <mesaf...@gmail.com> wrote:
I do not think a bike can stay upright without steering. Lateral tire forces are zero when a bike is upright and the bikes motion vector is aligned with the frame. When something falls over and is restrained at the base, the angular acceleration is proportional to the angle of rotation. So if a bike is upright and starts to tip, it does so rather slowly. At the same time, the camber force is also a function of the angle and quite small when the bike is near vertical. When at 45 degrees these forces can provide acceleration equal to the weight of the bike. Now there is a whole discussion about how bikes are now cornering at much greater angles and is it because there is a friction coefficient greater than one. I don't know. My point is that the camber force is big, increases with lean, and goes to zero at zero lean angle. So there is a restorative force similar to gravity for a regular pendulum. When a bike tips the camber force pushes the bike in the direction that it is falling. The camber force, however, cannot generate a turning moment by itself because moving the center of mass so that there is more weight on the front wheel or back wheel also changes the moment arm and camber force will only move the bike to the side. I think that rake may bias it slightly to the front because when a raked front end is steered the camber angle increases slightly but for this discussion a vertical steering axis is simpler.So the bike began to tip and camber pushed the bike to that side. The bike is moving sideways and forward so the actual direction of motion is not aligned with the frame but is at some small angle to the frame toward the side to which it began to tip. Most people I have talked to understand a slip angle as something you generate when you steer, You do this by turning the plane of the wheel at an angle to the direction of motion. The notion of angle of attack is valid because the tire can be replaced by a skate or ski or maybe even a hydrofoil and these vehicles will act much as a bicycle with wheels. Of course, there is differences in coefficients and angular momentum but in general tires are not needed. In any case, steering is generally thought of as turning the wheel to create a side force to alter the direction. Here is a case where the direction vector changes in relation to the wheel and a slip angle is formed. The bike tips to the right, camber forces push the bike right. Slip angles form at both wheels. Because the direction of motion is angled to the right but the wheels are still pointed straight ahead, both slip angle forces point to the left. This is where steering becomes necessary. The camber forces are opposed by the slip angle forces. The contact points would be held laterally and the bike would fall over as in the stationary case if it were not for the front steering axis. The front wheel is pushed into alignment by the slip angle force so that the front wheel automatically aligns with the direction of motion. The front slip angle force allows the front wheel to hunt for the vehicles direction. In doing this the slip angle force goes to zero and the camber force is no longer opposed. The camber force at the front can then push the front of the bike toward the fall. The back wheel cannot reduce the slip angle by steering so it is pinched between the camber force and the slip angle force. The back wheel is near the center of the yaw rotation as the bike steers into the fall. The camber forces cannot by themselves create a yawing moment so no matter how the moment acts on the bike, it is equal to the product of the rear slip angle force and the rear wheel to center of mass length.I know this is not easy to visualize so let me just say that in no way am I suggesting that you do not need a steering axis. I will point out, as well, that the rider has the ability to destabilize the bike at any time simply by leaning and preventing the front wheel from turning. The bike will then begin to fall to that side because of the bias provided and the opposing forces at the contact points. The rider can, of course recover by allowing the tire forces to bring him or her upright.It is like riding a bicycle, you never forget, or something along those lines is a common refrain. I think the big reason you can pick up bike riding so easily is that the bike never forgets and that learning to ride in the first place is learning to not grip the bars to tightly and trust the vehicle. A good bike is an extension of your body. You can influence its motion in so many ways. You can change the moment of inertia about the roll axis by standing up, you can yaw the bike with a twist of your body. You can lean and twist and dance on two wheels. You can't do that on a Whipple bike.
On Sun, Oct 12, 2014 at 3:16 PM, andy ruina <ru...@cornell.edu> wrote:
Peter: Oct 12, 2014About your self-stable bike with locked steering.That's what I call a bizarre extreme. I use it in my talks as such.Here's a pic of a real bike with that property (from Richard Klein):
<PastedGraphic-1.png>

{kind=link}
{kind=link}
{kind=link}
Dale Lukas Peterson
Oct 13, 2014, 8:37:22 PM10/13/14
to st...@googlegroups.com
Regarding the Whipple bicycle model, which models the tire
interactions as point contact without slip (some might say it doesn't
have a tire model), I have a few thoughts. Consider a simpler system:
a point mass pendulum with a bit of damping (either at the hinge or
from air). The system has two equilibria, the upwards configuration
and the downwards configuration. The stability "near" these equilibria
can be investigated through nonlinear (Lyapunov functions) or linear
(eigenanalysis of nonlinear dynamics linearized at equilibria)
techniques. The familiar linear stability analysis will yield
eigenvalues in the left half plane for the downward equilibrium
(stable), and eigenvalues in the right half plane for the upward
equilibrium (unstable). A few important points here:
1) stability is a property of an equilibrium point and applies to
states "near" this equilibrium point
2) the stability can be determined by the eigenvalues
3) the eigenvalues are dependent upon system parameters and are
implicitly dependent upon the equilibrium point
4) eigenvalues do not depend upon constraint forces!
Perhaps there is a way to make a formal mathematical argument for the
stability of the damped pendulum by using only the constraint forces
acting at the hinge. If there is, I would be interested to see it.
However, this is not the typical approach used to determine stability,
and appealing to constraint forces is definitely not required to prove
stability (or lack thereof). Indeed, the word "stability" has a very
precise definition in the world of dynamic systems theory. To be able
to say that an equilibrium point is stable requires one to show very
specific things, and none of them can be shown with hand waving.
Back to the Whipple bicycle model where the tire contact forces are
constraint forces (i.e., they do no work), we have an identical
situation. The eigenvalues are completely determined by the system
parameters and the operating conditions. Thus, we needn't appeal to
constraint forces to discuss the stability of the Whipple model.
Perhaps there is a way, though I'm skeptical that even if it could be
done that it would be any more elucidating than the current approach.
Now, consider the case where we allow for slip in both directions of
each contact (lateral and longitudinal at each tire contact). Such a
bicycle model would have 4 more velocity degrees of freedom than the
Whipple model. To investigate stability of an eqiulibrium condition
the model used for the components of force acting at both tire
contacts must be specified. Suppose this was done and the 4 components
of force could each be described by some function of system parameters
and state (configuration and velocity). To assess the stability, we
cannot consider only the tire contact forces (no longer constraint
forces). We must consider the tire contact forces *and* the dynamics
of the system. And fundamentally, the eigenvalues being in the left
half plane cannot be simply explained by a few hand waving arguments.
Those who have looked at the mathematical expressions for the
eigenvalues (or have done a Routh-Hurwitz analysis) know that there
are lots of terms involved and no catch all statement can explain
stability because fundamentally it depends upon many, many things, not
just a single one or two.
But like others have also said, I think that stability (in the
mathematical sense) is probably not the most useful way of
understanding how a bike feels, or as metric for comparison between
two bicycles with different system parameters, or the same bicycle
operating at two different operating conditions. I'm not sure what
is, but it would be really cool to figure it out!
Luke
“People call me a perfectionist, but I'm not. I'm a rightist. I do
something until it's right, and then I move on to the next thing.”
― James Cameron
interactions as point contact without slip (some might say it doesn't
have a tire model), I have a few thoughts. Consider a simpler system:
a point mass pendulum with a bit of damping (either at the hinge or
from air). The system has two equilibria, the upwards configuration
and the downwards configuration. The stability "near" these equilibria
can be investigated through nonlinear (Lyapunov functions) or linear
(eigenanalysis of nonlinear dynamics linearized at equilibria)
techniques. The familiar linear stability analysis will yield
eigenvalues in the left half plane for the downward equilibrium
(stable), and eigenvalues in the right half plane for the upward
equilibrium (unstable). A few important points here:
1) stability is a property of an equilibrium point and applies to
states "near" this equilibrium point
2) the stability can be determined by the eigenvalues
3) the eigenvalues are dependent upon system parameters and are
implicitly dependent upon the equilibrium point
4) eigenvalues do not depend upon constraint forces!
Perhaps there is a way to make a formal mathematical argument for the
stability of the damped pendulum by using only the constraint forces
acting at the hinge. If there is, I would be interested to see it.
However, this is not the typical approach used to determine stability,
and appealing to constraint forces is definitely not required to prove
stability (or lack thereof). Indeed, the word "stability" has a very
precise definition in the world of dynamic systems theory. To be able
to say that an equilibrium point is stable requires one to show very
specific things, and none of them can be shown with hand waving.
Back to the Whipple bicycle model where the tire contact forces are
constraint forces (i.e., they do no work), we have an identical
situation. The eigenvalues are completely determined by the system
parameters and the operating conditions. Thus, we needn't appeal to
constraint forces to discuss the stability of the Whipple model.
Perhaps there is a way, though I'm skeptical that even if it could be
done that it would be any more elucidating than the current approach.
Now, consider the case where we allow for slip in both directions of
each contact (lateral and longitudinal at each tire contact). Such a
bicycle model would have 4 more velocity degrees of freedom than the
Whipple model. To investigate stability of an eqiulibrium condition
the model used for the components of force acting at both tire
contacts must be specified. Suppose this was done and the 4 components
of force could each be described by some function of system parameters
and state (configuration and velocity). To assess the stability, we
cannot consider only the tire contact forces (no longer constraint
forces). We must consider the tire contact forces *and* the dynamics
of the system. And fundamentally, the eigenvalues being in the left
half plane cannot be simply explained by a few hand waving arguments.
Those who have looked at the mathematical expressions for the
eigenvalues (or have done a Routh-Hurwitz analysis) know that there
are lots of terms involved and no catch all statement can explain
stability because fundamentally it depends upon many, many things, not
just a single one or two.
But like others have also said, I think that stability (in the
mathematical sense) is probably not the most useful way of
understanding how a bike feels, or as metric for comparison between
two bicycles with different system parameters, or the same bicycle
operating at two different operating conditions. I'm not sure what
is, but it would be really cool to figure it out!
Luke
something until it's right, and then I move on to the next thing.”
― James Cameron
Calvin Hulburt
Oct 14, 2014, 11:07:42 AM10/14/14
to st...@googlegroups.com
There is some amount of rider control and some built in ability of the bike to stay upright. The major reason that a bike stays upright is due to the interaction of the tire forces and the design of the bicycle. The rider works with and against this to control the bike. I have described the basic mechanism that steers the bike to keep it upright, however, as speed increases, the bike no longer steers to stay upright. When a bike tips, camber forces push it to the side and this creates a slip angle. If the side direction is x and forward is y, the slip angle is vx over vy assuming no yaw. As vy increases the angles get smaller with speed and so do the slip angle forces so there is less to oppose the camber force and when cruising down the highway a bike stays upright by camber force alone. The rider's contribution is largely dampening.
andy ruina
Oct 14, 2014, 1:09:15 PM10/14/14
to st...@googlegroups.com
Calvin: Oct 14, 2014
I) Can you honor the request to say something rather precise that
you think someone will disagree with?
For example, do you think any of these things are true?
a) At high speeds a bicycle will balance itself even if the
steering is locked?
b) A bicycle with extremely narrow and stiff tires will
be notably difficult to ride?
II) If not these, can you say something that we could really
argue about? As written by you, below and in other emails, I
can't tell if perhaps we have a vocabulary issue and
that, like I think Luke suspects, you are using
"Camber forces" to mean what most of us would call,
in the case of high-pressure tires, "constraint forces".
The gold standard is, of course, the testable hypothesis.
So, for example, people said trail and gyroscopic forces
were necessary for bicycle self stability. We could argue all
day, but that boils down to the testable claim that it
would be impossible to make a self-stable bike without
gyroscope or trail. Even if we had not built such a bike,
we could still argue constructively about whether such
a thing is possible or not.
c) Do you have any such claim that could be put to a test?
d) Do you think some one of us has made a claim that
you could, in principle, design a test to refute?
If you can't answer these questions, this discussion is
doomed to going nowhere. Please talk them over with
a friend or colleague or relative and then cook up
a response.
I am not one to censure a discussion because of impatience.
So I'll keep trying. But you could make it more fun.
Calvin Hulburt
Oct 15, 2014, 1:24:22 PM10/15/14
to st...@googlegroups.com
As to (a): I once set out to determine top speed on my 250 Ducati and in so doing, I tightened down the friction damper because I felt it was there for just such a situation. After the test I slowed down and as my speed dropped to something on the order of 20mph the bike became difficult to handle and I barely missed falling over before bringing it to a stop. Clearly, steering is necessary but the mechanism of steering is most important at low speeds. At high speeds, the bike does not steer to remain upright for the most part. There are two ways in which a bike stays upright and steering is important at low speeds but camber forces dominate at high speeds.
(b) I don't understand the point of the question. Why should stiff tires be hard to ride? A ski bike is not hard to ride. In fact the lack of angular momentum makes it easier to handle.
As to the ideas that Luke brought up, I admit it is a little out of my area but after reading Wilson-Jones back when I was at the University, I followed the advice of one of the commenters and constructed the differential equations along the lines suggested. I came up with a fourth order equation which didn't tell me much so I researched and found Routh criteria for stability. I still have the notebook and the suggested way to put the coefficients into determinants from which conditions for combinations must be greater than zero. The results seem to make sense in that a more forward center of mass is more stable and increasing the Inertial mass of the front frame reduces it. I have set up many problems since but I never bothered with formal solutions because I just needed to find out how a system would act and computers can do that without all the algebraic calisthenics.
Luke has used a pendulum as an example of a system to demonstrate stability and I thank him for his clarification. I am trying to understand why Whipple does not reflect a bike's behavior and his thoughtful explanation may help. It seems to me that the analogy might be that one studies a simple pendulum and determines its stability only to find the center of rotation is mounted on track that allows the system to move sideways as well.
Whipple set up the equations so that a bike is steered into an arc and the centrifugal force creates a moment to return it to upright. I understand from Andy's comments then that the camber forces are considered constraint forces orthogonal to this curve.
(1)The design of a bike is such that the steering results from a moment about the yaw axis and not a moment about the "steering" axis.
(2)This moment is generated without the aid of the rider but additional input from the rider is possible.
(3)The bike does not always steer to remain upright but the center of mass can be kept over the contact line by motion due to camber forces.
Sharp modelled a bike with slip angles in 1971 so I see no need to go down that road.
It is simple to take one thing like angular momentum and conceive a way to eliminate it from a bike, but how do you eliminate something universal to them all? It will take some thought to arrive at a meaningful demonstration.
Calvin Hulburt
Oct 16, 2014, 4:21:39 PM10/16/14
to st...@googlegroups.com
Andy, I have been studying the TMS bicycle and it occurs to me that it demonstrated something more important than the two minor claims made in the title.
Andrew Dressel
Oct 24, 2014, 9:09:49 PM10/24/14
to st...@googlegroups.com
Andrew Dressel
Nov 8, 2014, 2:11:42 PM11/8/14
to st...@googlegroups.com
andy ruina
Nov 8, 2014, 2:21:03 PM11/8/14
to st...@googlegroups.com
Andrew:
What a nice www site.
Pool Calvin Hurlburt.
Reply all
Reply to author
Forward
0 new messages