global costmap when using AMCL
290 views
Skip to first unread message

Yu Tang
Feb 5, 2018, 10:19:31 PM2/5/18
to ros-sig-navigation
Hi all
When I used navigation stack to do simulation on STAGE. The environment:
STAGE:

Current global costmap:
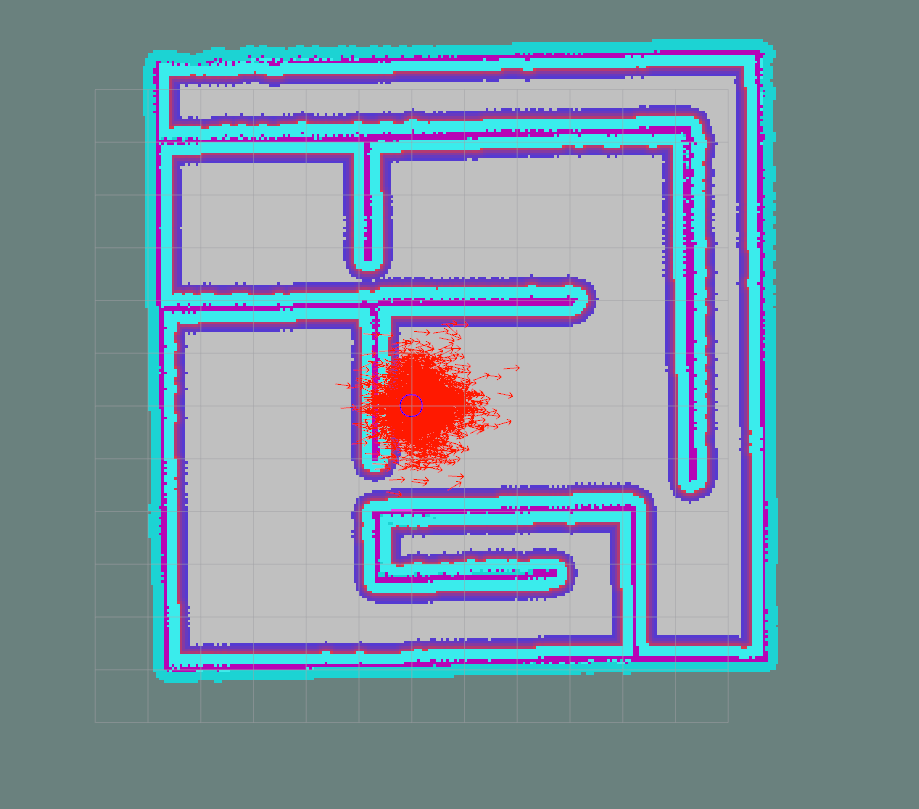
Then I used `2D Pose Estimate` to locate the current robot position like below, it's a little exaggerated, but to illustrate the situation.
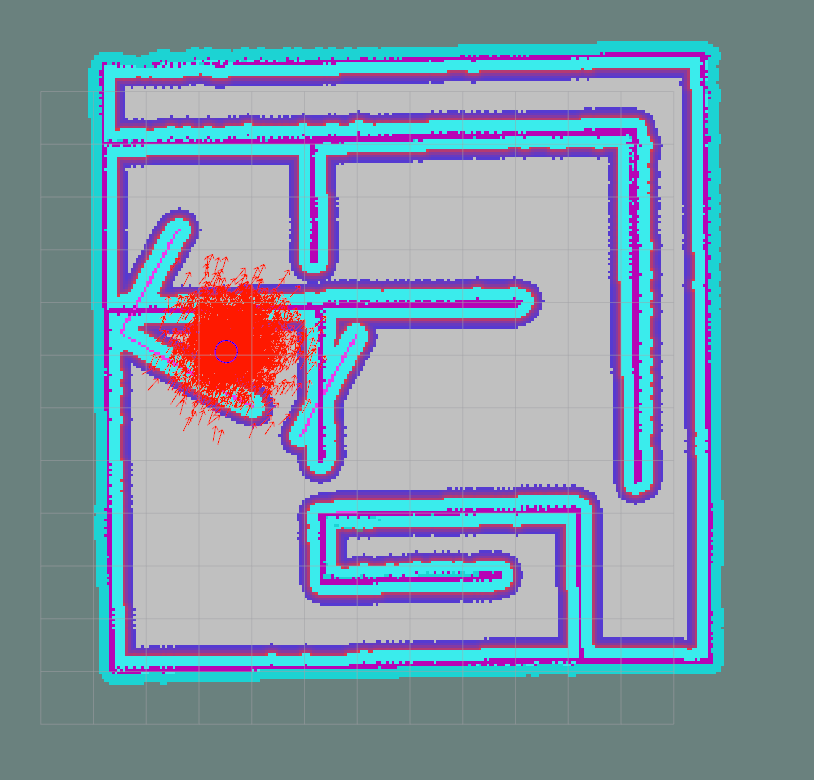
then I correct the position using `2D Pose Estimate` again. And then the global costmap looks below:

And you can see that, the global costmap have a lot `walls` that should not be there. And you can navigate to the point to the walls
because the `navfn` can not produce the glocal trajectory. And in some situation, the wrong global costmap will build a closed location
for a room, and the you cannot navigate to the room.
Is that a bug? Or do I miss something for this question? Thanks
When I used navigation stack to do simulation on STAGE. The environment:
STAGE:
Current global costmap:
Then I used `2D Pose Estimate` to locate the current robot position like below, it's a little exaggerated, but to illustrate the situation.
then I correct the position using `2D Pose Estimate` again. And then the global costmap looks below:
And you can see that, the global costmap have a lot `walls` that should not be there. And you can navigate to the point to the walls
because the `navfn` can not produce the glocal trajectory. And in some situation, the wrong global costmap will build a closed location
for a room, and the you cannot navigate to the room.
Is that a bug? Or do I miss something for this question? Thanks

David Lu!!
Feb 7, 2018, 4:57:27 PM2/7/18
to ros-sig-n...@googlegroups.com
The pattern of behavior that usually handles this is that move_base will run a clear_costmap recovery behavior after navfn fails, and then it should be able to plan correctly. You could also run that step manually when you relocalize.
--
You received this message because you are subscribed to the Google Groups "ros-sig-navigation" group.
To unsubscribe from this group and stop receiving emails from it, send an email to ros-sig-navigation+unsub...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Yu Tang
Feb 9, 2018, 2:17:07 AM2/9/18
to ros-sig-navigation
Thanks David, I got what you said. But it seem not work on the current navigation stack(kinetic-devel), and I found out that the default clear costmap layer is "obstacles",
but in costmap_2d_ros.cpp, the obstacle layer named "obstacle_layer", so it won't works well.
And I create a PR, https://github.com/ros-planning/navigation/pull/656. What's do you think? Thanks
but in costmap_2d_ros.cpp, the obstacle layer named "obstacle_layer", so it won't works well.
And I create a PR, https://github.com/ros-planning/navigation/pull/656. What's do you think? Thanks
Reply all
Reply to author
Forward
0 new messages