Hei taas robottiryhmä.
32 views
Skip to first unread message

pekka
Oct 24, 2022, 3:30:48 AM10/24/22
to robotti
Mitäs robottiryhmälle kuuluu?
Varmaankin on tehty taas uusia keksintöjä?
Minä olen tehnyt taas sille loimaalaiselle sianhoitajalle parikin uutta kekesintöä.
Ensimmäiseksi tein jyvienlaskentalaitteen tai oikeastaan 10 kpl niitä.
Ne laskevat jyviä, mutta miten?
Niitähän menee hirveät määrät istuskoneeseen.
Siellä on pieni pietzo anturi, josta tulee pieni pulssi, joka jyvästä.
Niitä pulsseja lasketaan CD14538 yhteen ja niistä tulee analoginen signaali.
Tuo CD14538 on retriggrable multivibrator.
Siitä tullutta signaalia verrataan CD339 neljällä komparaattorilla tai oikeasta kahdella eli 8 piirillä.
Näistä tulee 8 kpl lediä, jotka .loistavat jos jyviä menee oikea määrä.
Mikä on oikea määrä?
Sitä ei voi tietää enneenkuin kokeilee,
Sitä varten on 500k potikka, jolla säädetään loistavat ledit suurin piirtein oikein.
Jos siemeniä alkaa mennä vähemmän kuin aikasemmin, ledit sammuvat yksi kerrallaan.
Jos siemeniä menee enemmän kuin aikasemmin,uusia lediä syttyy.
Pitää laittaa kuva robootiyhdistyksen sivulle.
Sitten olen tehnyt samlle kaverille istuskoneen kallistusmittarin.
Instuskoneessa on hydraulisesti nousevat kahdesan pyörää, mutta kun ne laskee,
niin piräisi tietää onko ne tasaisesti, vai pitäisikö niitä säättä oikealle vai vasemmalle.
Miten voi ajaessa tietää onko kiekot tasaisesti?
Minä tein oikelle ja vasemmalle kallistusmittarin SCL3300 antururilla.
Se on suomalaisen Vaisalan kehittämä anturi, mutta sitä' myy nyt japanilainen firma.
Sen tarkkuus on 0.01astetta ja alue on 360 astetta.
Siis luultavasti maailman tarkin anturi.
Siinä on myös lämpötila-anturi.
Käytin siinä laittteessa kahta anturia ja molemmissa on SPI:llä toimiva anturi,
Se vaatii prosessorin anturin lähelle,
Se toimii 32 bitillä ja 32 bitillä toimiva tarkastussumma.
Niitä anturin tietoja on 16 kpl
Siis melkoinen homma saada anturin tieto etä-LCD:lle.
Käytin pääprosessorina PIC16F886 ja siinä on vain yksi sarjalikenne.
Milten sain molemmat anturit yhteen prosessoriin?
Käytin kaksisuuntainta likennenttä ja pääprosessori lähettää vuorotellen 'A' ja 'B' sanoman linjalle.
Kun oikea laite saa oman sanomansa, se enabloi oman sarjaliikennesignaalinsa ja lähettää datan keskusprosessorille.
Siinä sanomassa on aluksi A tai B, jotta pääprosessori tietää kummalta laitteelta data tulee.
Antureilla on yksi yhteinen kaapeli 6 m näyttölitteeseen ja kaksi omaa kaapeliaan 6 m antureille.
Pääprosessori näyttää molemmat kulmat ja ja niiden liikeet mm:nä.
Anturin liikevarren voi konfiguroida yhdellä napilla 10-999 mm.
Samoin näyttöviiveen voi konfiguroida.
Samalla napilla voi nollata kulmat.
Tästäkin laitteesta varmaan pitäisi laittaa kuvia.
Pekka

Jorma Laajala
Oct 24, 2022, 12:30:21 PM10/24/22
to rob...@googlegroups.com
Morjens Pekka !
Mielenkiintoisia juttuja olet ollut tekemässä.
Täällä ei ole asian puitteilta mitään merkittäviä tapahtunut.
Viimeisimpänä tulee mieleeni muutos XY-pöytään jota olen käyttänyt puun jyrsintään ja plasmaleikkaukseen.. Ohjauksena olen käyttänyt LinuxCnc:tä. Se käyttää rinnakkaisporttia, mutta kun tällä liittymällä varustetut tietokoneet alkaa olla hakusalla ja muutenkin käyttäisin mieluummin omaa läppäriä, niin lisäsin CNC-koneeseen USB-liitäntä mahdollisuuden. Ohjauksena käytän tällöin Universal G-Code senderiä. USB:n ja NC:n välillä käytän Arduinoa muuntamaan tulot askelmoottori ohjaimille sopiviksi. En keksinyt pyörää uudelleen, vaan käytin Arduinossa jonkun tekemää Open source koodia.
t. JormaL
--
Sait tämän viestin, koska olet tilannut seuraavan Google-ryhmän: robotti.
Jos haluat peruuttaa tämän ryhmän tilauksen ja sen sähköpostiviestien vastaanottamisen, lähetä sähköpostia osoitteeseen robotti+u...@googlegroups.com.
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/18cbfff3-d75f-4f05-b128-0e02859bef77n%40googlegroups.com.
Pekka Ritamäki
Oct 24, 2022, 2:02:02 PM10/24/22
to rob...@googlegroups.com
Hienoja töitä Jorma.
Kyllä kai tavalliseen USB porttiin voi liittää USB/rinnakkaisportti liittimen,
Minullakin on muistaakseni yksi sellainen.
Toinen asia on kuinka ohjelmat käyttävät tätä porttia.
Luultavasti DOS ohjelmat eivät osaa käyttää lainkaan.
Mutta sitten on vielä DOSBOX 0.7 simulaattori
Kyllä rinnaikaisporttikin toimii DOSBOXissa
Sellainen portti pitää kuitenkin hankkia WIN10 koneeseen.
Minä olen käyttänyt oikeastaan vain Protelin Schematic ohjelmaa DOS boksin avulla.
Mutta uudempi Protelin ADCPCB ohjelma ei toimi DOSBOXin avulla.
Se vaatii XP:n, mutta ei toimi WIN10:ssä.
Taas piti laittaa uusi emulaattori: WMWARE Workshop
Sen avulla piti ladata XP: WIN10;n.
Se oli XP:n emulaattori ja siihen piti ladata ensin XP ja sitten tuoda muistitikun avulla noita XP ohjelmia.
Kuitenkaan ei tuo SCHEMATIC ohjelman pääohjelma suostunut toimimaan minun emulaattorissa.
Se kuitenkin toimi erään toisen kaverin samassa emulaattorissa.
No, sitten siinä pitää käyttää DOSBOX 0.7 emulaattoria.
Kuitenkin minulla on vielä toimiva XP kone, jossa toimii Protelin SCHEMATIC ja XP:n ADVPCB ohjelmat.
Minä olen tehnyt 40 vuotta kytkentöjä tuohon Schematic ohjelmaan. Siitä en hevillä luovu.
Tässä on uusi kallistus mitarini
Pekka
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAMXdwknXxfWy-4aeYdc7Zj1aqSn%2BBigGtxAwUfRLJZA9DO%2BUrA%40mail.gmail.com.
Jorma Laajala
Oct 25, 2022, 1:59:39 AM10/25/22
to rob...@googlegroups.com
Linux CNC:n ongelma on, että USB-rinnakkaisportti muuntimet eivät pääsääntöisesti toimi sen kanssa. Tämä uusi systeemi jonka rakensin, tarvitsi vain Arduinon, joita minulla oli ennestään. Ei tullut mitään uusia rahallisia kustannuksia ja tuntuu toimivan. Rajoituksena on, että se ohjaa vain kolmea akselia, mutta se riittää minulle. Varmaan on muitakin tapoja. Tämä nykyinen muutos sattui kuitenkin ensimmäisenä silmään.
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAF0vcf4XX%3Dv%3DD4E6-Vsc-kC%3D-S8wN7S0C975j3ggLrnAs7QOnw%40mail.gmail.com.
Jorma Laajala
Oct 25, 2022, 2:08:14 AM10/25/22
to rob...@googlegroups.com
Etuina tästä uudesta järjestelystä on se, että käytän läppärissäni Fusion 360 CAD-sovellutusta. Voin samalla koneella ja softalla suunnitella, mallintaa ja generoida G- goodin ja liittää läppärin NC-koneeseen ja aloittaa työstäminen. Käytössä on WIN10, mutta WIN11 kävisi myös. Viimeisin työ NC:llä oli puurunkoinen polkupyörä.
Pekka Ritamäki
Oct 25, 2022, 4:34:07 AM10/25/22
to rob...@googlegroups.com
OK hieno systeemi.
Sillä ei ole väliä mikä se ohjauslaite on, jos se vain toimii.
Mutta muistaakseni tuo Fusion 360 on kyllä hieno ohjelma, mutta aika kallis,
Eikös se ole vanha Aurocad?
Minä olen viime aikoina kokeillut Rasberry PICO PI H mallia. .
Se tarvitsee vielä ohjelman ja olen käyttänyt PicoMite Basic ohjelmaa.
Sen voi ladata https://geoffg.net/picomite.html sivulta.
Sitten se ohjelma ladataan Pico Pin sisään laittamalla se ohjelma vain PC:n uuden levysaseman päälle
Sitten laitetaan Teraterm ohjelma päälle ja haetaan siitä oikea COM portti (minulla COM15).
Laitoin vielä pienen LCD grafiikkanäytön 0.9" SSD1306 siihen,
Kyllä siinäkin pitää komentoja lukea, mutta näinhän se on aina uusien prosessorien kanssa.
Pekka
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAMXdwk%3DzbNN42F9_XZHt-wX%2B2n1Zkk_HJvmofry5H%3DNwG3O%3DRw%40mail.gmail.com.
Pekka Ritamäki
Oct 25, 2022, 8:05:17 AM10/25/22
to rob...@googlegroups.com
Jorma tässä on muutama kuva.
Ne kuvat ovat siellä loppupäässä.
Pekka
Jorma Laajala
Oct 25, 2022, 1:42:45 PM10/25/22
to rob...@googlegroups.com
Hienoja systeemejä olet kehittänyt/rakentanut!
Fusion 360 eroaa melkoisesti perinteisestä AutoCadista, vaikka onkin Autodeskin tuotteita. Samantapainen on esim Solidworks. Fusion on,ei kaupallisessa käytössä, ollut ilmainen.
Raspberryä olen minäkin käyttänyt. Ihan kätevä ja nopea tapa tehdä jotain yksittäisiä juttuja.
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAF0vcf6dp57-zevfw2KYgoW045T3bQe1ipUXMtfC%3D%3DGDU4osyw%40mail.gmail.com.

Henry Palonen
Nov 5, 2022, 2:52:11 PM11/5/22
to rob...@googlegroups.com
Terve kaikille!
Onpas mukava kuulla pitkästä aikaa robottiryhmäläisistä ! Ja mukava että keksintöjä on tehty ja puuhaa on ollut sopivasti.
Täällä toivutaan koronasta ja hiljalleen pystyy keksintöjäkin harrastamaan.
Erikoisemmat jutut on ollut sulan lasin ja polymeerien kanssa puuhailut, niitä on ollut jonkin verran. Tein softat ja ohjaukset sellaiseen laitteeseen joka sulattaa lasia ja venyttää sitä ohueksi. Lasin vahvuutta ohjataan feed-back loopilla jossa on laser ja vetopyörät, paksuus pidetään muutaman tuhannesosan tarkkuudella sopivana. Lasista tehdään leikkauksissa käytettäviä kirurgisia täytepaloja. Toinen juttu on eräänlainen vetolaite joka vetää lasikuitu+polymeeriseosta ikäänkuin mekaanisin käsin vuorovedoin niin että nopeus pysyy samana. Samoin 5 akselista CNC-jyrsintää on harjoiteltu, sellaisen vuosi sitten hankin ja sillä olen tehnyt erilaisia medical-puolen prototyyppejä peek-muovista ja magnesiumista. Ihan jännää puuhaa tuo 5 akselinen juttu ja siinä tuo Fusion 360 on ollut täälläkin käytössä ja mukavasti on toiminut - kaupalliseen käyttöön siitä maksan muistaakseni 270e/vuosi.
Varsinaisia robotteja on tullut kovin vähän tehtyä, lähinnä muutamia vuosia sitten tekemäni lidar-robotti, lähinnä sisäkäyttöön mutta ulkonakin sillä vaihtelevin tuloksin ajelin. Tuntuu aurinko vaikuttavan tuollaiseen laseriin kovasti. Siinä on tuollainen harraste-laser joka tuo 360 asteen pistepilven ja Raspberry Pi sitten sitä käsittelee ja sen mukaan robottia ajelee sopiviin suuntiin. Muutaman käsivarsirobotin kanssa on tullut puuhattua kylläkin, ohjausratoja niihin tosin tehdään ihan kaupallisin softin opettamalla kuten yleinen tapa taitaa olla. Kotiin on kotiautomaatiota viritelty, kylmäallas pysyy 6 asteessa langattoman litium-akulla toimivan mittakortin mittausten kautta. Kortti sammuttaa itsensä täysin ja yksi pieni 3Ah akku riitti koko talveksi viime talvena, mittauksia tehdään n. 15 min välein. Sisälle tein wlan-verkkoon yhdistävät hiukkas ja co2 mittarit, niistä näkee mukavasti jos hiilidioksidi- tai hiukkastasot nousee. Niissä on softan teko vielä vähän kesken, on ollut ongelmia että tuo Sensirion SCD30 putoaa pois väylästä silloin tällöin - joskus se toimii päiviä ihan hyvin ja joskus taas muutaman tunnin sisällä putoaa pois. No hoidin asian laittamalla hw-watchdogin joka boottaa kortin ellei mitään tapahdu 8 sekunnin aikana. Nyt pysynyt verkossa 5 päivää eli saattaa olla että toimii nyt tällä softaversiolla ihan ok. Kotiautomaation ytimenä on Home Assistant johon nämä eri kortit lähettävät MQTT:llä sanomat. Kun uusi kortti laitetaan ensi kertaa wlaniin ja se saa yhteyden MQTT välittäjään, se rekisteröi itsensä Home Assistanttiin automaattisesti uutena laitteena ja kertoo mitä sensoreita sillä on ja sen jälkeen niitä voi tuolla kotiautomaatiossa käyttää miten tahtoo. Ihan hauskaa näpräämistä sekin.
Laittakaahan lisää projekteista, mukava kuulla mitä kukin on puuhaillut.
--
Henka
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAMXdwkk9kHzOTLyMQ_mv_F6cJ4arZDTB%3DZGCpTKeFcau38hRGQ%40mail.gmail.com.
Pekka Ritamäki
Nov 6, 2022, 1:11:26 PM11/6/22
to rob...@googlegroups.com
Henry,
kyllä sinä olet taas tehny mahtavia töitä.
Me Hannun kanssa ihmettelimme sinun kykyäsi.
Pyysit lisätietoa projekteista ja teinkin yhden
Mitä on MQTT? ja mitä on Home Assistant?
Olen minäkin tehnyt kotiautomaatiota varmaankin 20 vuotta
Ne on tosin vain minun itse tekemiäni läitteita.
Jos haluat tarkastella tätä keskustelua verkossa, siirry osoitteeseen https://groups.google.com/d/msgid/robotti/CAK0pjU4VhzvbTTr3iv8XVoE0qMyx8kxjOG%3Dhoiypu%3D7G9_ngoQ%40mail.gmail.com.
pekka
Oct 7, 2023, 2:15:41 PM10/7/23
to robotti
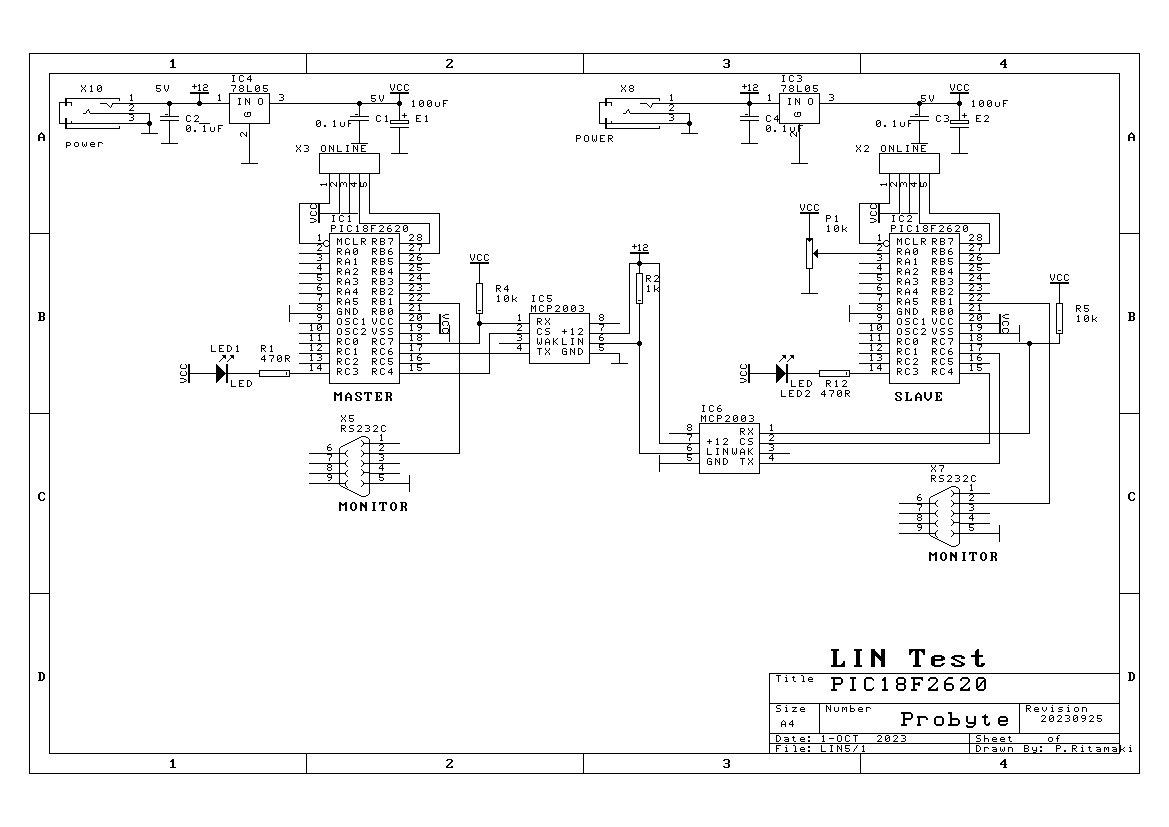
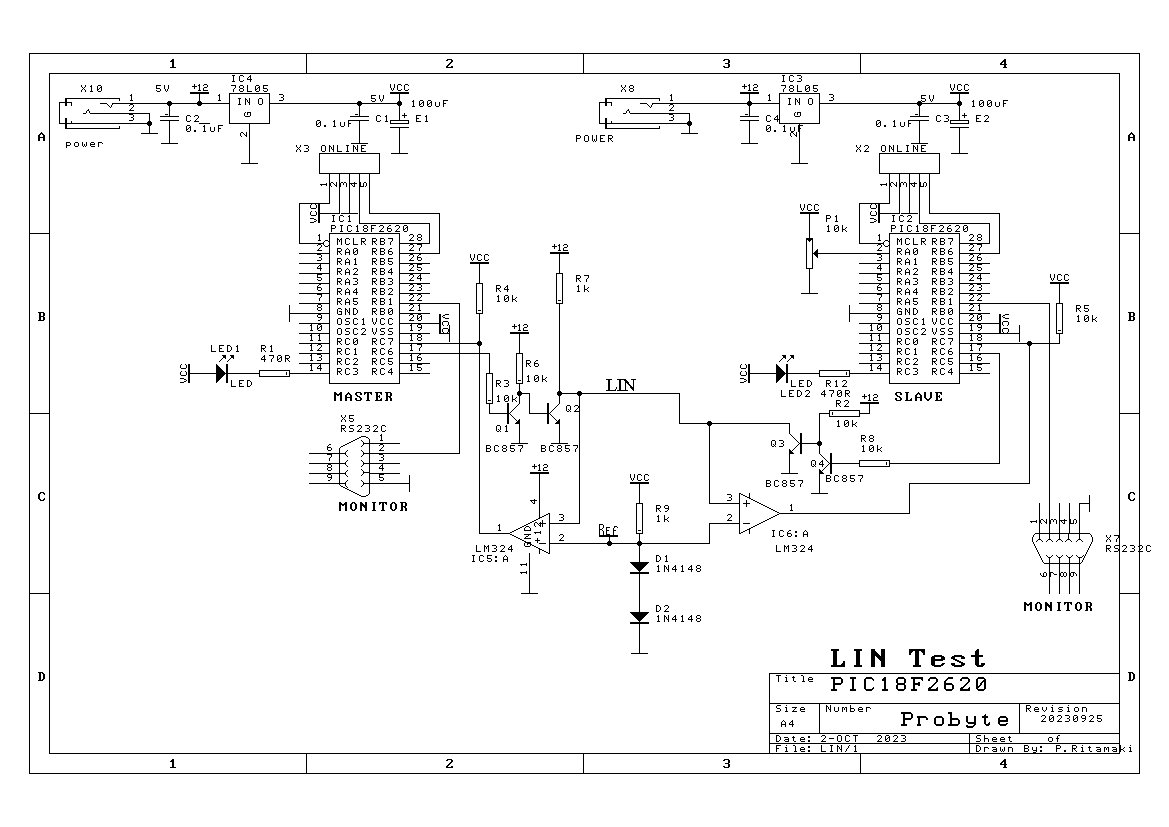
Tässä on pari kuvaa LIn protokollasta.
Lin protokolla toimii sarjaliikenenteellä, mutta vain yhdellä johdolla TX ja RX yhdessä.
Yksi master pystyy komentamaan 31 slavea.
Tätä käytetään autoissa vähemmän tärkeissä asioissa kuten pielin käntämisessä ja muissa asioissa.
Mutta miten missään Internetissä ei ole kerrottu kuinka se toimii.
Siinä voi olla nopeus 300 -19600 baudia ja vastaanottajia voi olla osoitteellä 1-31.
Master toimii osoitteella 0.
Mutta miten tuo LIN toimii?
Olen kokeillut sitä koko kesän ja lopulta ostin Microchipin MCP2003 drivereita ( 8 napainen pieni mikropiiri) ja kokeilin tuota (kuva 1).
Sain selville, että siinä käytetään vain RS232 tyylistä interfacea, mutta sen signaali on käänteinen RS232 verrattuna, siis TX signaali menee 0:n kun bitti lähetee.
RS232 se menee 1:n
RX signaalia ei tarvitse kääntää kuten tavallisessa RS232->UART tapauksessa.
Siinä RX:ssä voi käyttää vaikka komparaattoria (tässä kuvassa 2 on kutenkin tavallinen OPAMP).
Riittää, että suojaa tuon prosessorin RX nastan vastuksella esim 10k, koska LIN protokolla voi toimia 7-30V tasoilla, yleensä 12V:lla.
Lin protokolla on kyllä aika monimutkainen.
Siinä pitää lähettää ensin 0x55 alkubytenä, mutta vain käynnistyksessä ja sitten Master lähettää ID merkin.
Siinä on ensin slaven osoite 1-31 ja kahdella yläbitillä merkitään monta dataa on tulossa Slavelle.
Jokainen lähetetty merkki pitää heti lukea pois, muuten ohjelma menee sekaisin.
Tämä on tarkeä asia.
Kun Slave saa ensimmäisen merkin, se tietää, että nyt sanoma on tulossa.
Sinä ID:ssä on kaksi ylintä bittiä, jotka määrittelevät monta byteä on tulossa, 2, 4 tai 8,
Siiten Slave lukee esim kaksi data byteä ja lisäksi yhden tarkistusbyten
Se tarkistysbyte on toisi monimutkaikainen, mutta kyllä sen pystyy tekemään.
Jos kaikki vastaanottobytet tulivat oikein, niin Slave lähettää Masterille taas ID merkin ja sanoo, että nyt tulee 2, 4. tai 8 databyteä.
Slaven pitää myös lukea RX:ään tulleet omat merkit pois.
Se lähettää esim. kahden byten ADC muuntimen arvo ja taas tarkistusbyten Masterille samaa LIN väylää pitkin.
Tämä toimii nyt minulla, mutta vasta testauskappaleissa.
Kun kysyin Tomilta minkälainen hänen monikanavainen väylänsä oikein on?
Tom näytti melkekin samanlaisen väylän vaikka siinä ei ollut TX ja RX yhdistetty, mutta näin se on helpompi ohjelmoida
Tomilla on oma ohjelmansa.
==
Minä olen tehnyt Blolinderin tehtaalle tuolla Tampereen ja Porin puolessavälissä Harvallassa toimivalla ruotsalaisten omistamalle metallivalutehtaalle
Se on 99 kappaletta toimivan saraliikenneväylän ja saanut siitä myös patentin.
Se toimii siten että lähetetään ensin alkumerkki #, sitten osoite 1-99 sitten komentobyte ja parametri ja loppumerkki $
Kun oikea osite on löytynyt aliohjelma lukee esim. tornin 3D miitauksen ja lähettää sen masterille,siten, että aluksi slave laitaa oman lähettimensä päälle yhteiseen RX johtoon ( tansistorilla) ja lähettää viestin.
Vastaanotossa on tavallisessa RS232 väylässä 1 k vastus maihin, että vain oikeat sanomat tulevat perille.
Miitaukset talletetaan PC:lle..
Ne näytetään Display ohjelmalla.
Uusi näyttö tulee joka kuukausi.
Viestit menevät sitten Internettiin ja sietä valvojille automaattisesti kotitietokoneille.
Niitä mittauskanavia on 24 kappaletta.
Niillä valvotaan tornin liikkeitä 3D mallissa kerran 5 sekunnissa.
Tornissa on 2.4MW lämpöteho.
Se sulaatta malmia.
==
Tuo LIN prokolla on melko monimutkainen.
Jos teette omia juttuja käyttäkää vain yhtä tarkistusmerkkiä.
Ainankin minulla se on toiminut hyvin.
Samoin ei kannata käytää yhden johdon LIN väylää.
Kyllä parempi on käyttää tuota minun keksimääni enable väylää.
.

Tässä on kuva Bolinderin tehtaasta.
Siellä oli pieni tulipalo.
Tuo minun valvoma torni on vasemalla.
Pekka
Reply all
Reply to author
Forward
0 new messages