Python module has problem calculating the dynamics functions for robots imported from urdf files.
34 views
Skip to first unread message

S Kumar
Jul 22, 2021, 3:46:25 AM7/22/21
to Robotics & Machine Vision Toolboxes
I am using the python version of RTB toolkit for calculating the RNE and gravload for a robot model imported from a urdf file. The urdf file is modified from the https://github.com/ros-industrial/motoman/tree/kinetic-devel/motoman_gp12_support . I have manually calculated the inertial parameters of each links and updated them in the file. After importing the robot model, the both the robot model and Elinks are loaded correctly. and the calculations related to fkine and ikine_LM works without any issues. However the dynamics functions (
rne ) throws following error:
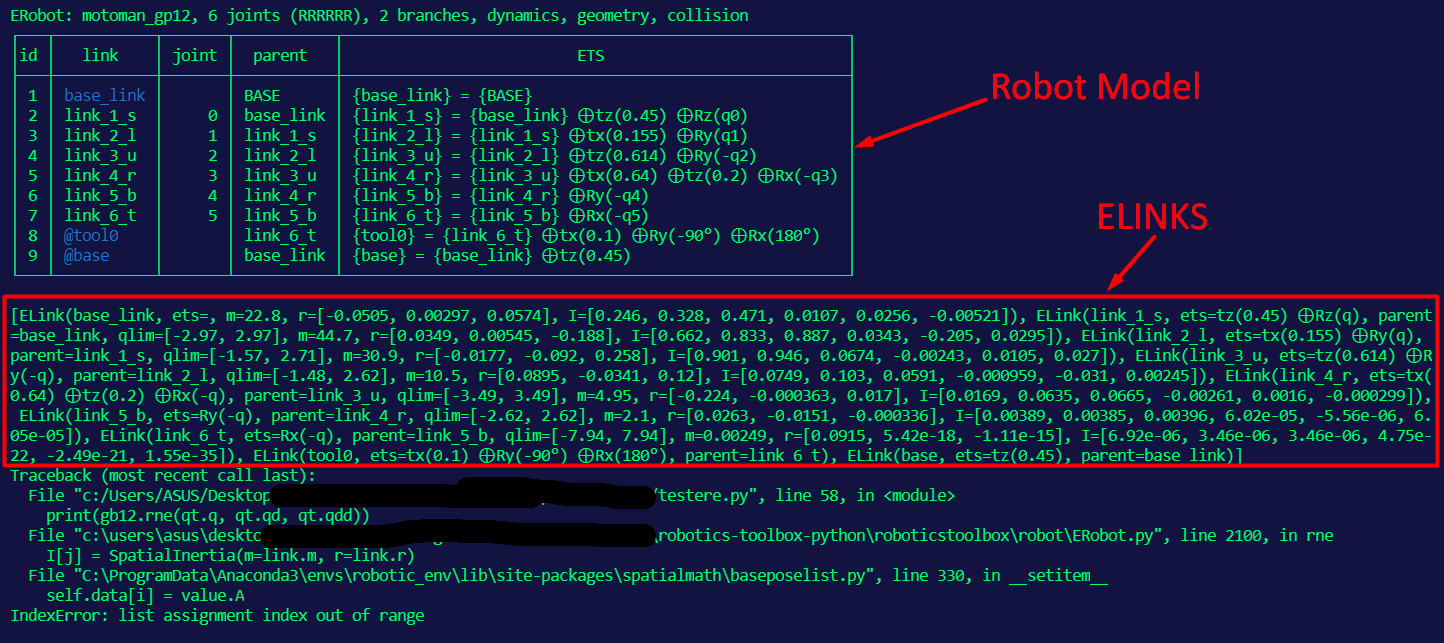
A minimal code to reproduce this issue is as follow:
import numpy as np
import matplotlib.pyplot as plt
import roboticstoolbox as rtb
from roboticstoolbox import robot
def get_gb12():
return robot.ERobot.URDF('motoman_gp12/urdf/gp12.xacro')
gb12 = get_gb12()
print(gb12)
print(gb12.elinks)
qt = rtb.jtraj([0,0,0,0.1,0.1,0], [1,0.1,-0.2,0,0,0], 50)
print(gb12.rne(qt.q, qt.qd, qt.qdd))
Reply all
Reply to author
Forward
0 new messages