simulink error about the sl_arm_ibvs
528 views
Skip to first unread message

Jin
Apr 26, 2018, 3:20:36 AM4/26/18
to Robotics & Machine Vision Toolboxes
Dear everyone,
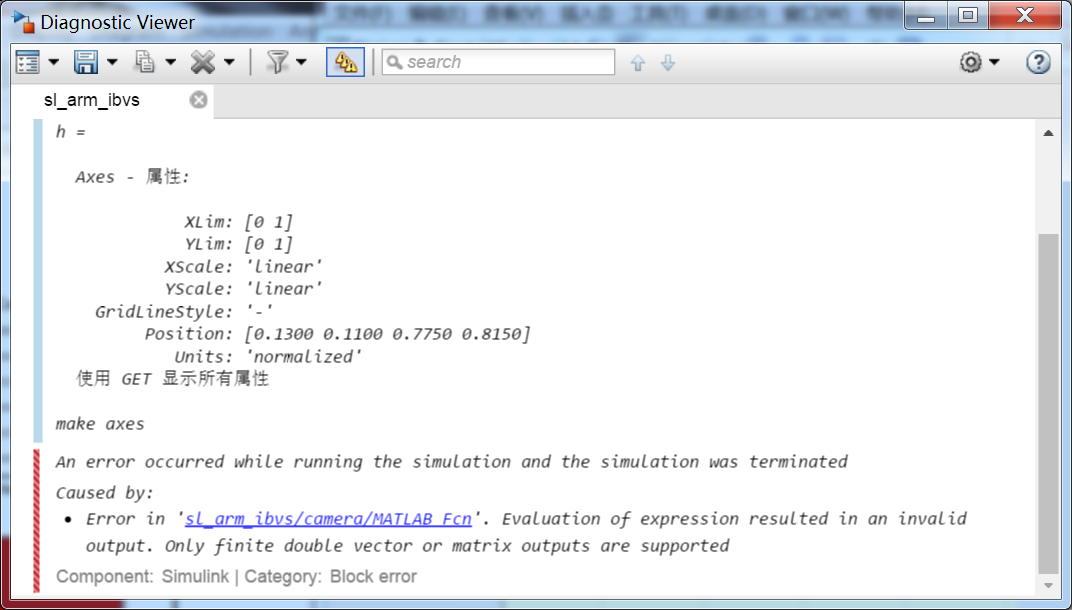
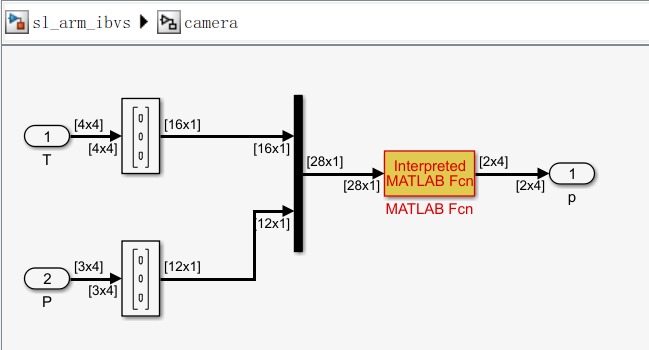
I am trying to run sl_arm_ibvs, but there are some errors described as follows:
"Evaluation of expression resulted in an invalid output. Only finite double vector or matrix outputs are supported"
It says the error is in the function 'slcamera'. However, I have installed the function, and there is no error when I run sl_ibvs .
I'm using Matlab R2017b and i've installed the latest versions of both RTB and MVTB.
Could you please help to give a solution?
Thank you so much!
I am trying to run sl_arm_ibvs, but there are some errors described as follows:
"Evaluation of expression resulted in an invalid output. Only finite double vector or matrix outputs are supported"
It says the error is in the function 'slcamera'. However, I have installed the function, and there is no error when I run sl_ibvs .
I'm using Matlab R2017b and i've installed the latest versions of both RTB and MVTB.
Could you please help to give a solution?
Thank you so much!

Peter Corke
Apr 28, 2018, 9:19:34 PM4/28/18
to Robotics & Machine Vision Toolboxes
Jin, thanks for testing this code, I think you are one of the very few.
I cannot replicate this error, my model runs fine using code from the distributed toolboxes. The things I would do to resolve this:
- start a brand new MATLAB session
If that doesn't help, then you'll need to do some debugging.
- First modify slcamera so the first 2 lines look like this
function p = slcamera(cam, u)
u'
- From Simulink window menu, select View/Diagnostic View which brings up a new window, it will show the values now being passed to slcamera
- Run the simulation
- After it fails cut and paste the output of the diagnostic view to me.
Message has been deleted
Jin
May 24, 2018, 2:18:21 AM5/24/18
to Robotics & Machine Vision Toolboxes
Thank you for your reply! I modify slcamera like this:
function p = slcamera(cam, u)
u'
u'
if all(u == 0)
% Simulink is probing for the dimensions
np = (length(u)-16)/3;
p = zeros(2, np);
else
P = reshape(u(17:end), 3, []);
Tcam = reshape(u(1:16), 4, 4);
p = cam.plot(P, 'pose', Tcam, 'drawnow');
end
% Simulink is probing for the dimensions
np = (length(u)-16)/3;
p = zeros(2, np);
else
P = reshape(u(17:end), 3, []);
Tcam = reshape(u(1:16), 4, 4);
p = cam.plot(P, 'pose', Tcam, 'drawnow');
end

and get the diagnostic view:
Peter Corke
Jun 17, 2018, 8:14:36 AM6/17/18
to Robotics & Machine Vision Toolboxes
It's not clear to me, is this now solved, or still a problem?
Jin
Jul 11, 2018, 2:52:56 AM7/11/18
to Robotics & Machine Vision Toolboxes
Thank you for your reply! It's solved now!
在 2018年6月17日星期日 UTC+8下午8:14:36,Peter Corke写道:
在 2018年6月17日星期日 UTC+8下午8:14:36,Peter Corke写道:

yuchen...@gmail.com
Mar 9, 2019, 4:17:48 PM3/9/19
to Robotics & Machine Vision Toolboxes
Hi Jin,
I also run into this problem when I run the simulation. I've already modified the .m file slcamera but the error is still there. Can you tell me how did you fix the error?
Thank you very much!
Peter Corke
Mar 16, 2019, 7:00:44 PM3/16/19
to Robotics & Machine Vision Toolboxes
are you sure the new slcamera.m is on your path. Use the which command to check. Are you getting exactly the same error as the other people?
peter

Xihu milk
May 18, 2022, 11:13:31 AM5/18/22
to Robotics & Machine Vision Toolboxes
Dear everyone,
I also run into this problem when I run the simulation and I've already modified the .m file slcamera but the error is still there. Meanwhile , the sl_ibvs can be run well. I'm using Matlab R2021b and i've installed the latest versions of both RTB and MVTB. Could you please help to give a solution?
Thank you very much!
I also run into this problem when I run the simulation and I've already modified the .m file slcamera but the error is still there. Meanwhile , the sl_ibvs can be run well. I'm using Matlab R2021b and i've installed the latest versions of both RTB and MVTB. Could you please help to give a solution?
Thank you very much!

{kind=link}
{kind=link}
jianyou qi
Jun 13, 2022, 3:54:05 AM6/13/22
to Robotics & Machine Vision Toolboxes
"Evaluation of expression resulted in an invalid output. Only finite double vector or matrix outputs are supported", Dear Jin, you said you had solved this problem, can you explain the process how to deal with this issue? thank you very much
Reply all
Reply to author
Forward
0 new messages