Wrist is not spherical. What is wrong with inverse kinematic?
115 views
Skip to first unread message

東南
Oct 20, 2021, 4:52:15 PM10/20/21
to Robotics & Machine Vision Toolboxes
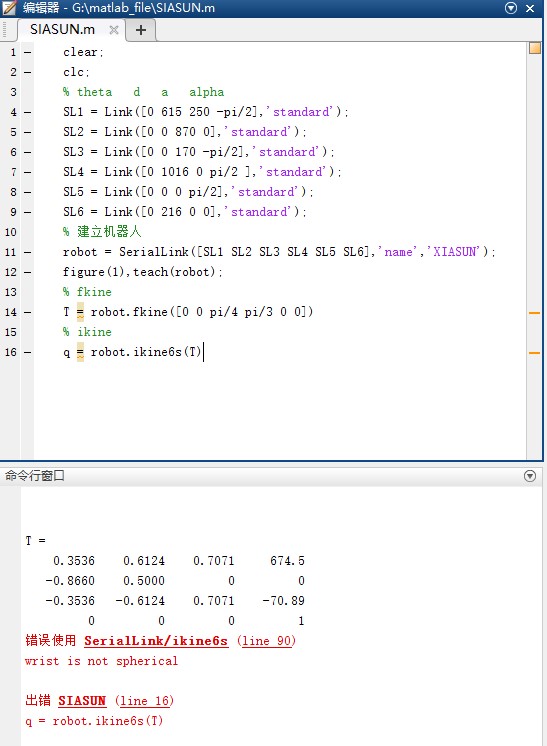
I have a big problem with my 6-R industrial robot. My robot is satisfied with PIPER Rule but when I want to solve the
inverse kinematic with the function ikine6s(), the error comes out as:wrist is not spherical. Why?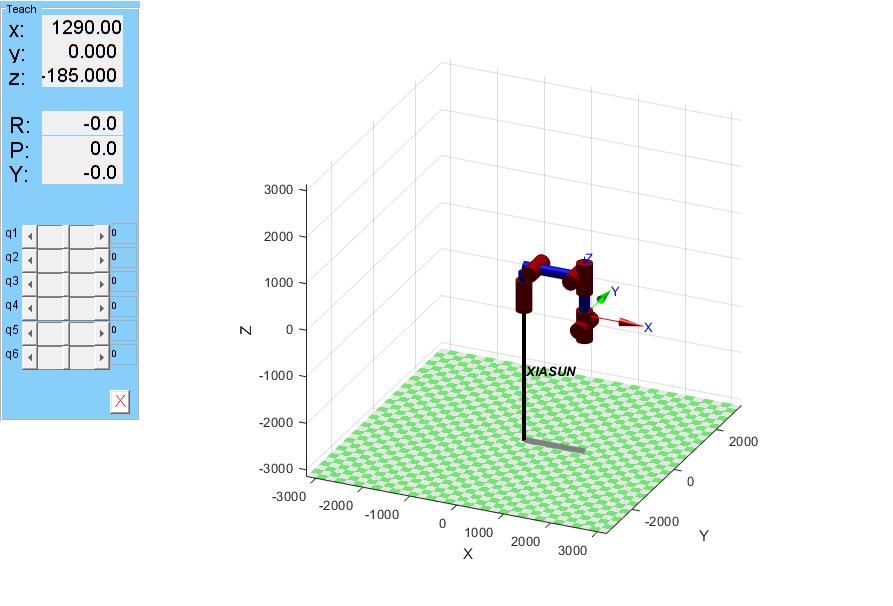
Reply all
Reply to author
Forward
0 new messages