Puma560 joint limit performance
517 views
Skip to first unread message

toc tic
Nov 2, 2013, 9:43:25 AM11/2/13
to robotics...@googlegroups.com
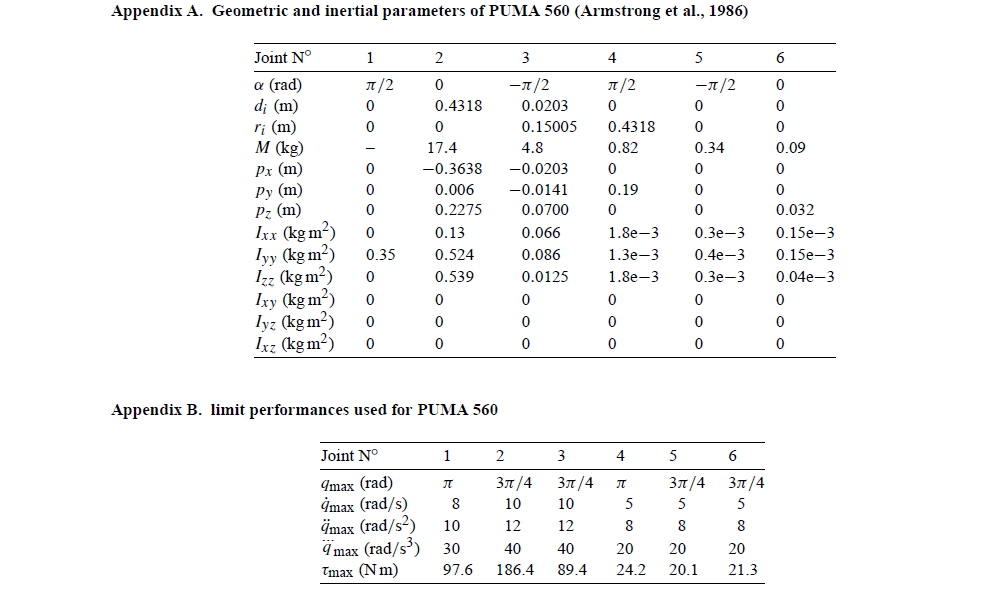
Could not find the limit performance of puma560 as above in the paper "A Search for Consensus Among Model Parameters Reported for the PUMA 560 Robot"
Does any body got the accurate of the joint limit of puma560?
toc tic
Nov 2, 2013, 11:17:27 AM11/2/13
to robotics...@googlegroups.com
could anybody get the limit performance parameters of puma560 from the book "Robot Manipulators: Modeling, Performance Analysis and Control"
在 2013年11月2日星期六UTC+8下午9时43分25秒,toc tic写道:
在 2013年11月2日星期六UTC+8下午9时43分25秒,toc tic写道:

Peter Corke
Nov 2, 2013, 8:29:53 PM11/2/13
to robotics...@googlegroups.com
What do you mean by limit? Limits of joint angles, limits of velocity, acceleration??
--
You received this message because you are subscribed to the Google Groups "Robotics & Machine Vision Toolboxes" group.
To unsubscribe from this group and stop receiving emails from it, send an email to robotics-tool-...@googlegroups.com.
To post to this group, send an email to robotics...@googlegroups.com.
Visit this group at http://groups.google.com/group/robotics-tool-box.
For more options, visit https://groups.google.com/groups/opt_out.
toc tic
Nov 3, 2013, 12:59:52 AM11/3/13
to robotics...@googlegroups.com
apparently , the limit performance of the puma560 consist of the joint velocitys,accelerations and jerks. Just as the table describe.
Guess what, the joint torque limit could be calculate from the motor toque and the gear ratio.
While the joint velocity and acceleration is just given by somehow.
I GUESS the joint v. and a. should also be calculate frome the motor parameters and the ratio.
in this way, the robot motion parameters could be optimized.
在 2013年11月3日星期日UTC+8上午8时29分53秒,Peter Corke写道:
在 2013年11月3日星期日UTC+8上午8时29分53秒,Peter Corke写道:
Peter Corke
Nov 3, 2013, 1:47:40 AM11/3/13
to robotics...@googlegroups.com
It's a complex problem, and speed depends a lot on the robot pose. Motor torque which accelerates the joint is mostly used to fight friction and gravity, and is ultimately limited by the power amplifier and motor power rating. Speed is also limited by motor back EMF. Most of the inertia parameters are not that influential on robot performance.
Bottom line, it's a complex thing to figure out.
I looked at this in depth for a Puma 560 robot, see VISUAL CONTROL OF ROBOTS: - Peter Corke
peter
Reply all
Reply to author
Forward
0 new messages