Is the location setting correct on the Sedan car?

ji li

Radu Serban
Thanks for reporting this. It turned out to be a bug in the initialization of the rack-and-pinion steering mechanism. I pushed a fix for it in the ‘main’ branch of the Chrono repository.
--Radu
From: projec...@googlegroups.com <projec...@googlegroups.com>
On Behalf Of ji li
Sent: Thursday, 1 December 2022 10:30
To: ProjectChrono <projec...@googlegroups.com>
Subject: [chrono] Is the location setting correct on the Sedan car?
Hello
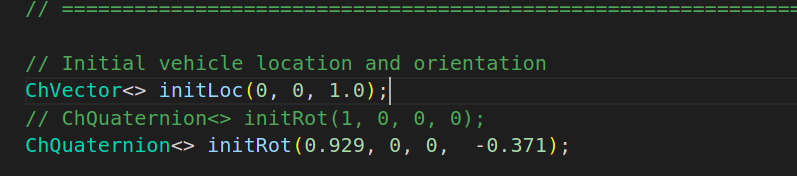
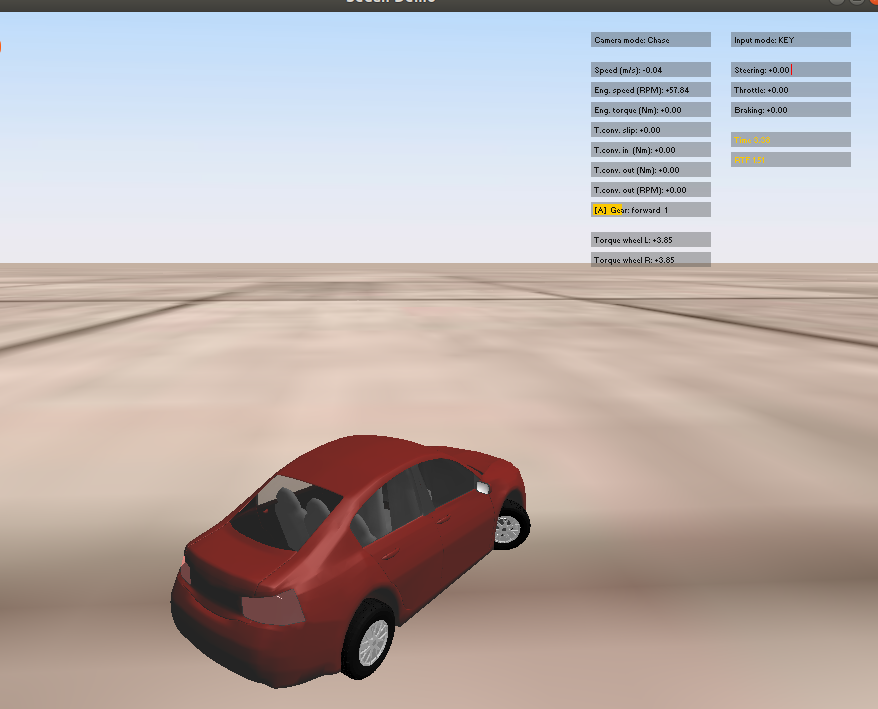
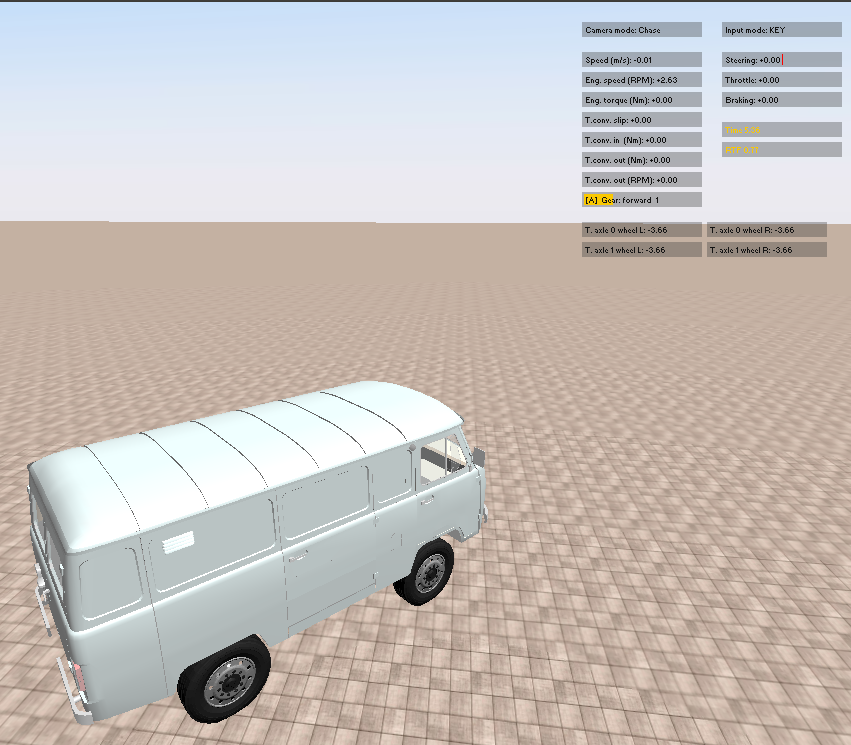
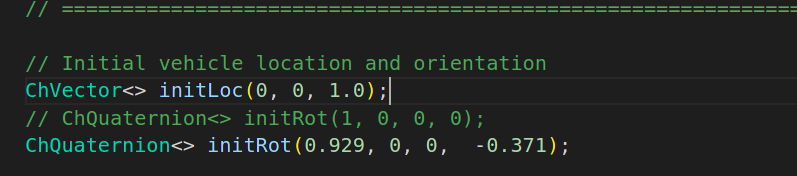
I‘m skeptical about the pose settings of the Sedan when I set the initRot(0.929, 0, 0, -0.371) on demo_VEH_Sedan.cpp as shown in the first picture. I found that the rotation of the tires of the car also changes as shown in the second picture. However I do the same rotation setup on demo_VEH_UAZBUS.CPP and the tires are normal, we can see the third picture. Is the result of the Sedan right?


--
You received this message because you are subscribed to the Google Groups "ProjectChrono" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
projectchron...@googlegroups.com.
To view this discussion on the web visit
https://groups.google.com/d/msgid/projectchrono/532b856f-bff5-4520-8ee9-8c678950472bn%40googlegroups.com.
ji li
Thanks for reporting this. It turned out to be a bug in the initialization of the rack-and-pinion steering mechanism. I pushed a fix for it in repository.
--Radu
Radu Serban
The current implementation is, granted, a bit fragile. But the issue is that your quaternion
ChQuaternion<> initRot(0.929, 0, 0, -0.371)
Is not quite unit-norm and as such does not represent a proper rotation.
Either:
- Normalize it before use, making a call
initRot.Normalize(); or - Use a function that generates a unit quaternion, for example
ChQuaternion<> initRot = Q_Fron_AngZ(-45 * CH_C_DEG_TO_RAD);
Please verify that the code as you have it works fine if you provide a proper rotation quaternion (any of the above).
Then you can pull the latest code – I made a modification to the rack-and-pinion template implementation to make it more robust. That will also work with your not-quite-right quaternion. But again, I strongly suggest you keep your input data consistent and accurate.
To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/943e8cc6-e83f-4127-8619-aa94a853cafan%40googlegroups.com.