[PyChrono] The VRK Project: powered by PyChrono

luis.u....@gmail.com
Dear developer and user community,
Hope everybody is still healthy.
At this time I just want to share a simple project I have been working in recently: The Virtual Rotor Kit Project, a project “powered” by PyChrono. You can find more info in https://www.vrkproject.org/, where it is also a free available demo version. Although it is a preliminary result, I am pretty happy with it. Looking forward to hearing your thoughts or suggestions about this project and its demo version.
I don’t want to miss the opportunity to thank again to those ones in this forum who helped me, specially to Alessandro, Radu and Simone.
Regards,
Luis

Radu Serban
Hi Luis,
Very nice work. We are always glad to hear about such projects building on Chrono or PyChrono.
Would it be ok with you if we mentioned this on the ProjectChrono website?
Best,
--Radu
--
You received this message because you are subscribed to the Google Groups "ProjectChrono" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
projectchron...@googlegroups.com.
To view this discussion on the web visit
https://groups.google.com/d/msgid/projectchrono/dcb46bfc-0833-4247-b9d3-bfca1947af70n%40googlegroups.com.
luis medina

Alessandro Tasora
Dear Luis,
Thank for the release! It is a classical problem (the "Jeffcott
rotor") that we teach at Universities when we discuss unbalance,
resonance, etc. during the courses in applied mechanics.
Some comments:
- maybe just my impression, but I see that the flywheel starts with a non-uniform angular velocity, like it is subject to some residual torsional vibration that later disappears.
- I already implemented some Jeffcott rotor test ( in c++ in demo_FEA_beamsIGA.cpp), are you aware?
- it would be nice if you implement also an automatic computation of the Campbell diagram of the rotor... this would require some modal analysis features that are not yet in the develop branch of Chrono, but will be in future.
Alessandro Tasora
--
luis medina
Dear Alessandro,
Thank you very much for your insight and comments. I really appreciate them.
About your comments:
“maybe just my impression, but I see that the flywheel starts with a non-uniform angular velocity, like it is subject to some residual torsional vibration that later disappears”
I believe that the behavior at the beginning is related with the homogenous rotor’response contribution. As far as the particular (forced) response “dominates “, that contribution vanishes. That the reason user has to wait 1 sec. before “acquiring” the measurements, as an attempt just to collect mainly the forced response. By now, that 1-sec period has been empirically set up (I have to work on it).
“I already implemented some Jeffcott rotor test ( in c++ in demo_FEA_beamsIGA.cpp), are you aware? “
Thanks for that comment. It is the same version that is available at PyChrono example, isn’t it? I guess it is. I checked the demo_FEA_beamsIGA.py that helped me to formulate the Jeffcott rotor on flexible supports model I am using for this demo. Having said that, I will explicitly cite the C++ demo you wrote as reference for this project.
it would be nice if you implement also an automatic computation of the Campbell diagram of the rotor... this would require some modal analysis features that are not yet in the develop branch of Chrono, but will be in future.”
Thanks for that kind suggestion. By now, I am trying to focus on modelling only the measurements we expect to get from a typical experiment in a rotor kit experiment. I mean, it is up to user to figure out how to process the discrete time-domain measurements he (she) got from the virtual rotor kit’ experiments. Those “measurements” are delivered by the application as simple txt files. I like to think this approach encourage the user (e.g. student) to look for a strategy to process the measurements.
Luis
To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/c59c857d-b361-ae0a-c514-fb9af499345c%40ied.unipr.it.
luis.u....@gmail.com
Hi (Py)Chrono devs and users,
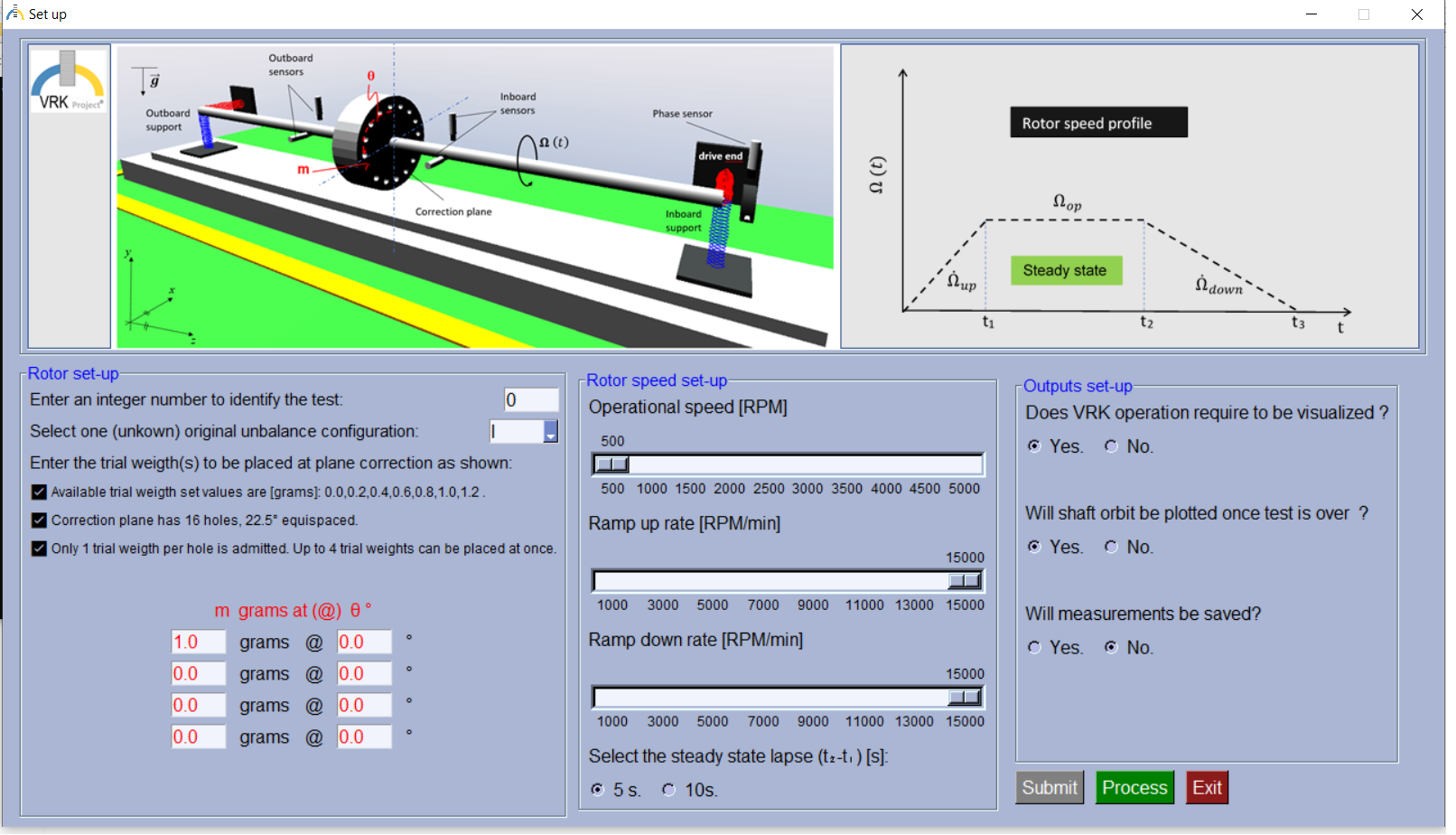
Just to share with you what I think is now a better beta version of this -still- personal project.
At https://www.vrkproject.org/ you can find the updated version. Have a look to the picture below; it's part of the GUI for this stand-alone (well, I hope so!) application.
I hope some of you can download and run it, hence let me know your suggestions about it.
Once again, thanks for making Chrono Project available for everyone.
Regards,
Luis

Dan Negrut
Luis – thanks for sharing!
:-)
Dan
-------------------------------------------------
Bernard A. and Frances M. Weideman Professor
NVIDIA CUDA Fellow
Director, Wisconsin Applied Computing Center
Department of Mechanical Engineering
Department of Computer Science
University of Wisconsin - Madison
4150ME, 1513 University Avenue
Madison, WI 53706-1572
-------------------------------------------------
From: projec...@googlegroups.com <projec...@googlegroups.com>
On Behalf Of luis.u....@gmail.com
Sent: Saturday, July 16, 2022 1:36 PM
To: ProjectChrono <projec...@googlegroups.com>
To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/50832c4c-f3cc-4af2-96e9-816d51d6083bn%40googlegroups.com.