High frequency noise in virtual tire test rig

James Baxter
James Baxter

dr.ratz...@gmail.com

Radu Serban
James,
Rainer’s fix worked in an indirect way. I pushed some changes that should address the issue you reported. Please let me know if the results are now more as you expect them.
--Radu

--
You received this message because you are subscribed to the Google Groups "ProjectChrono" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
projectchron...@googlegroups.com.
To view this discussion on the web visit
https://groups.google.com/d/msgid/projectchrono/e52e6334-9ec7-4a7b-a093-c6085e66839cn%40googlegroups.com.
James Baxter
James Baxter
Radu Serban
James,
A rigid tire is appropriate only in very specific situations (e.g., on soft deformable terrain). In some demos we also use such tires on rigid terrain, but those are just that – demos. Do not read too much into tire kinematics properties from a rigid tire model. Instead, like you already did, switch to a proper tire model (TMeasy, Pac02, Pac89, Fiala).
Having said that, I pushed a change to the code to also invoke CalculateKinematics for a ChRigidTire. You will notice that the outputs can be quite noisy – this is because the tire-terrain interaction is done here through frictional contact between two rigid bodies. If you really want to use that tire model, you should use a ChSystemSMC (smooth contact formulation).
--Radu
From: projec...@googlegroups.com <projec...@googlegroups.com>
On Behalf Of James Baxter
Sent: Sunday, 22 January 2023 02:45
To: ProjectChrono <projec...@googlegroups.com>
Subject: Re: [chrono] Re: High frequency noise in virtual tire test rig
Looking into it further, I found that the flat line for slip angle and longitudinal slip is indeed a bug in Chrono's code rather than my own. With the new 8.0.0 release, only some tires call `CalculateKinematics`, which is responsible for updating those values. In the above, I was using HMMWV_RigidTire, which does not update those values. This appears to be the relevant commit: c9167c87e32c54e1936c9d90e12c50793ebde1e0.
You can see that the virtual function, `Synchronize` is only being being overridden by several tire models, and Rigid Tire is not one of them. I assume this is a bug and not intentional behavior?
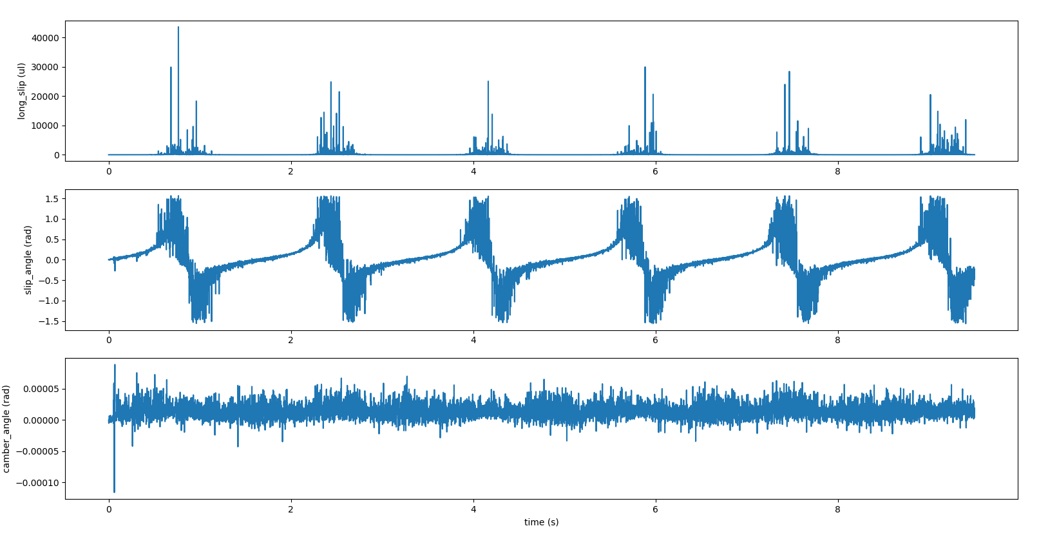
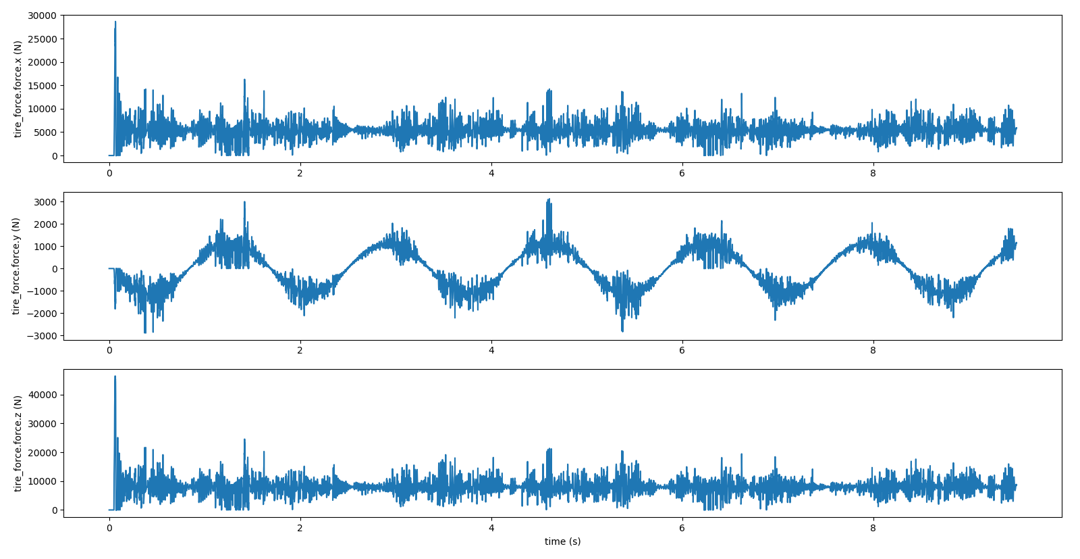
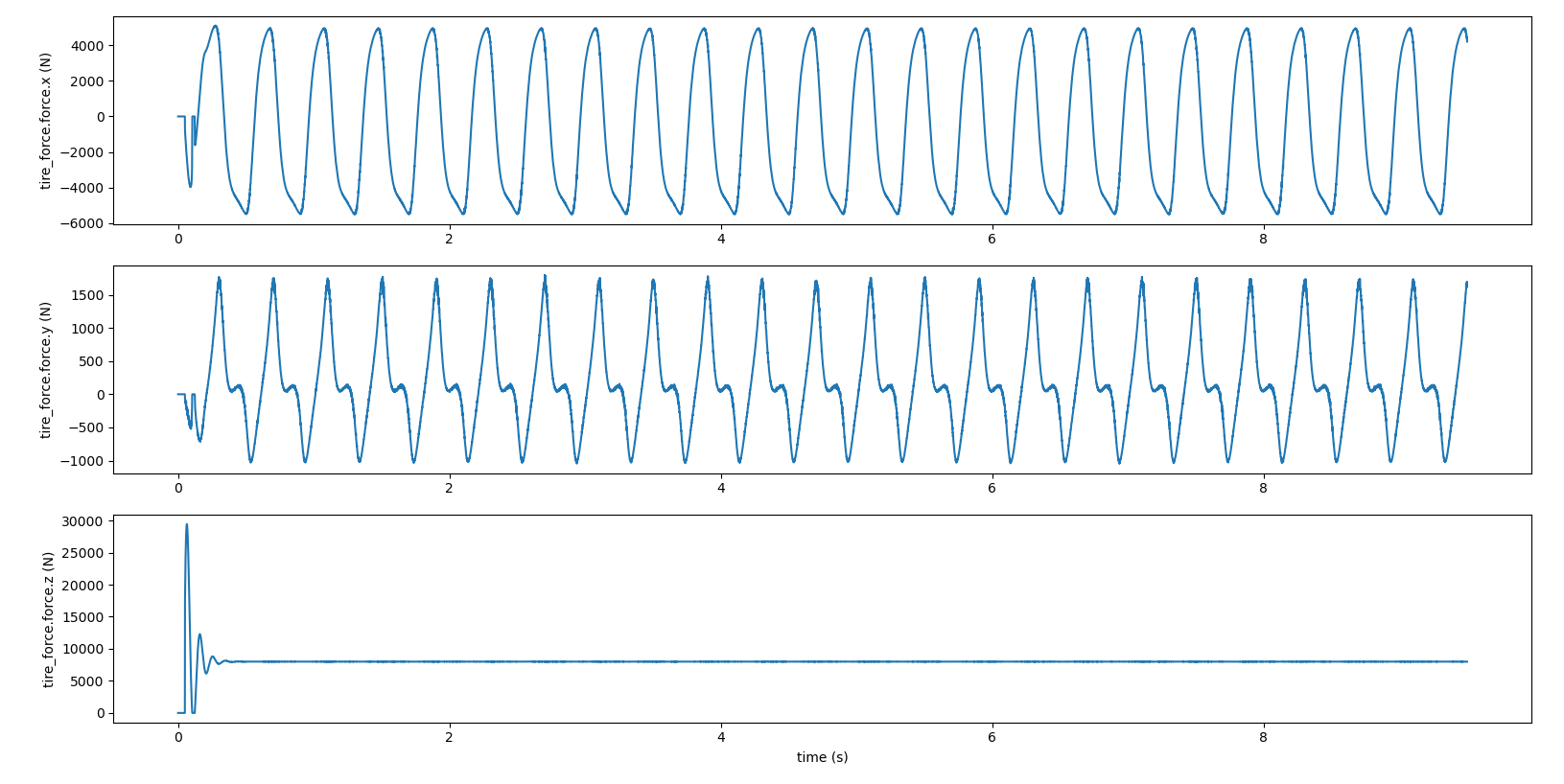
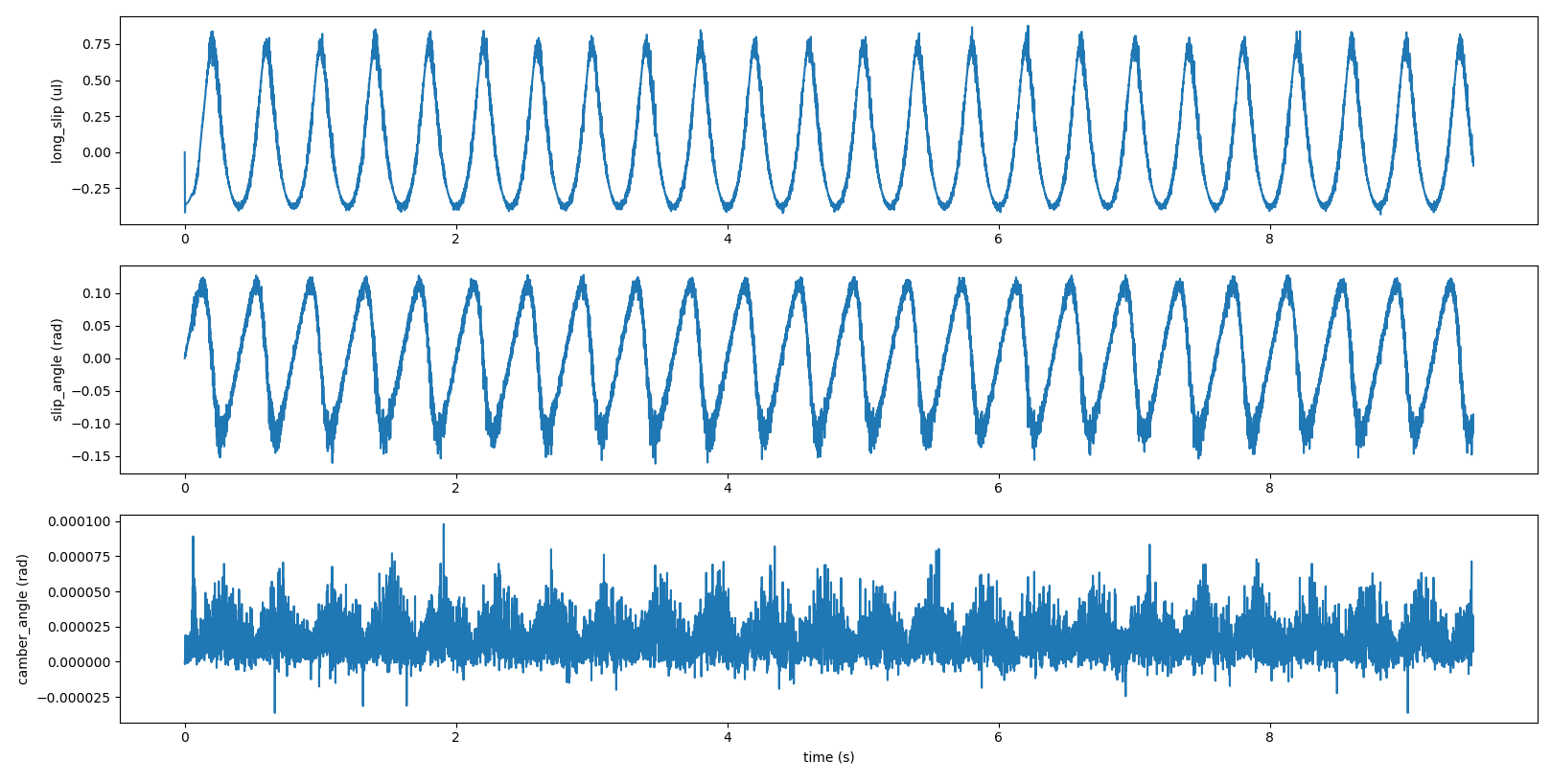
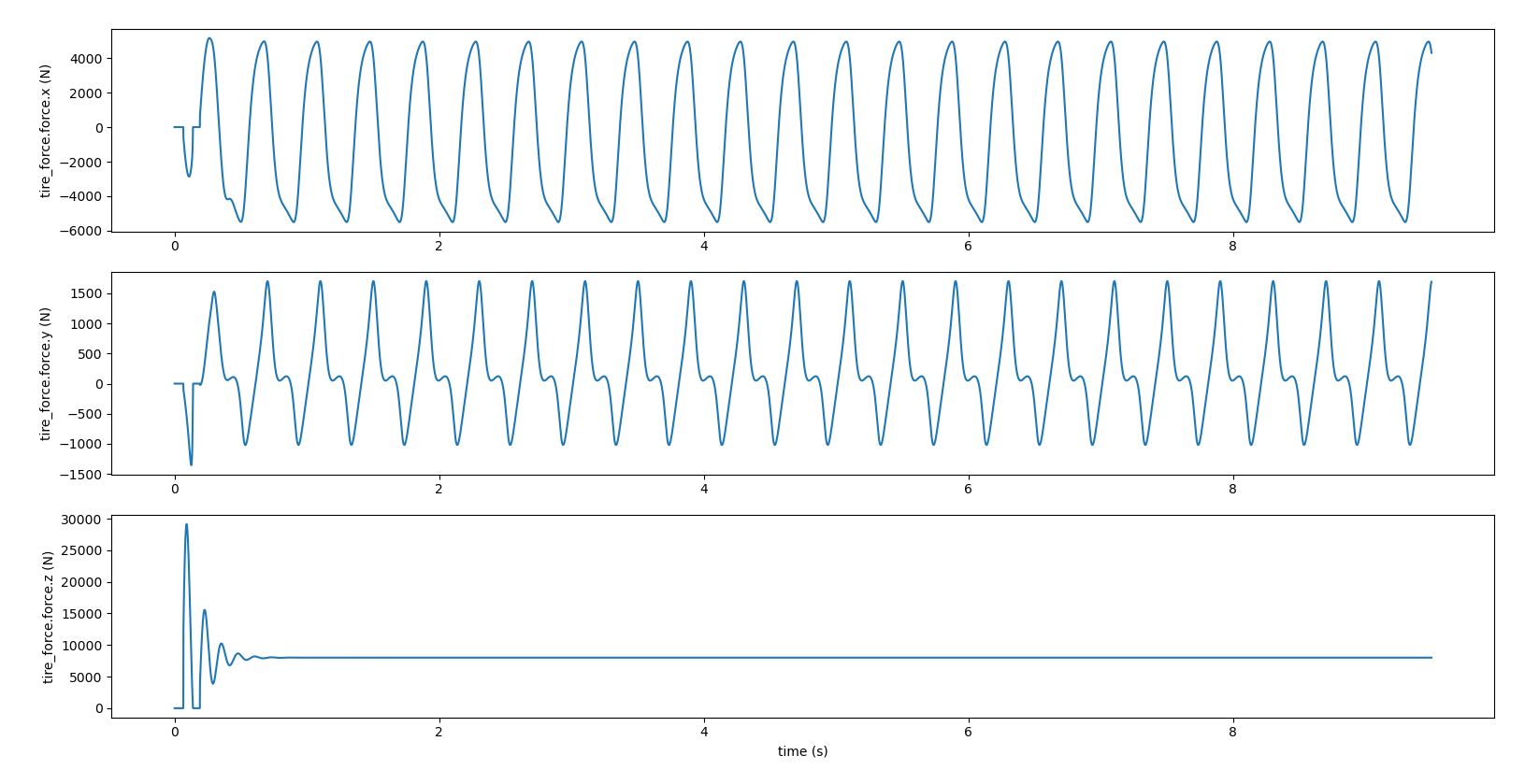
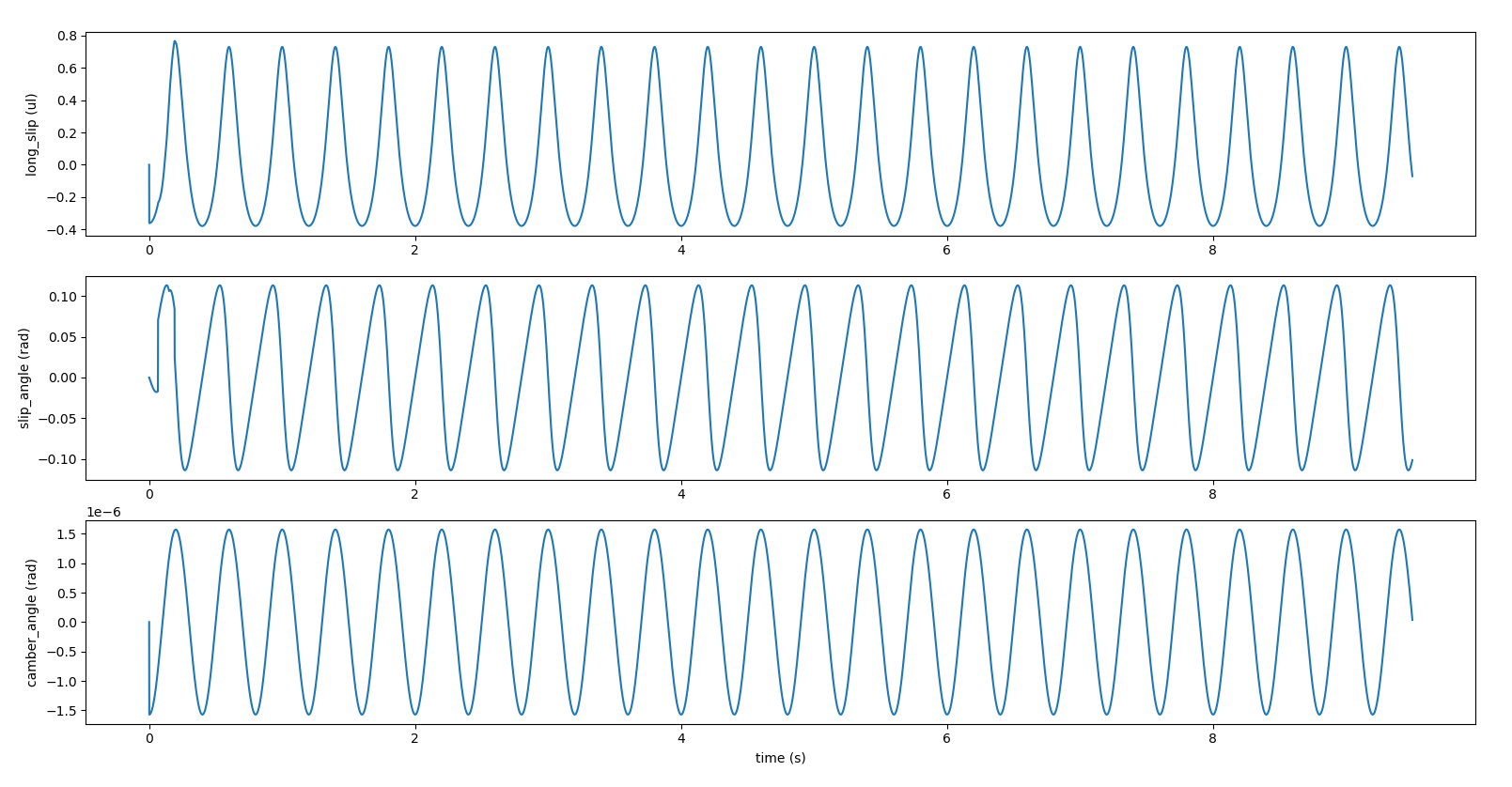
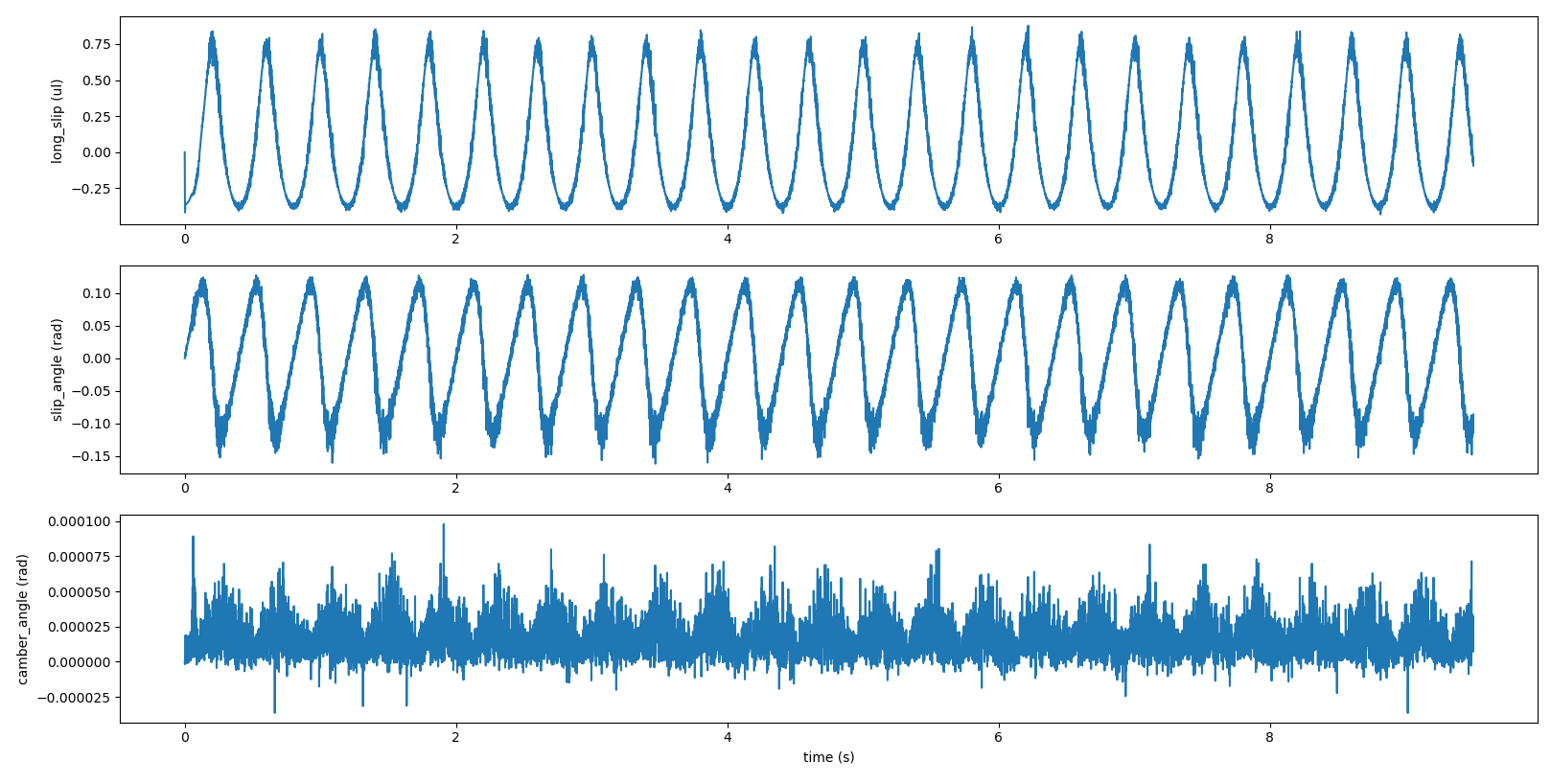
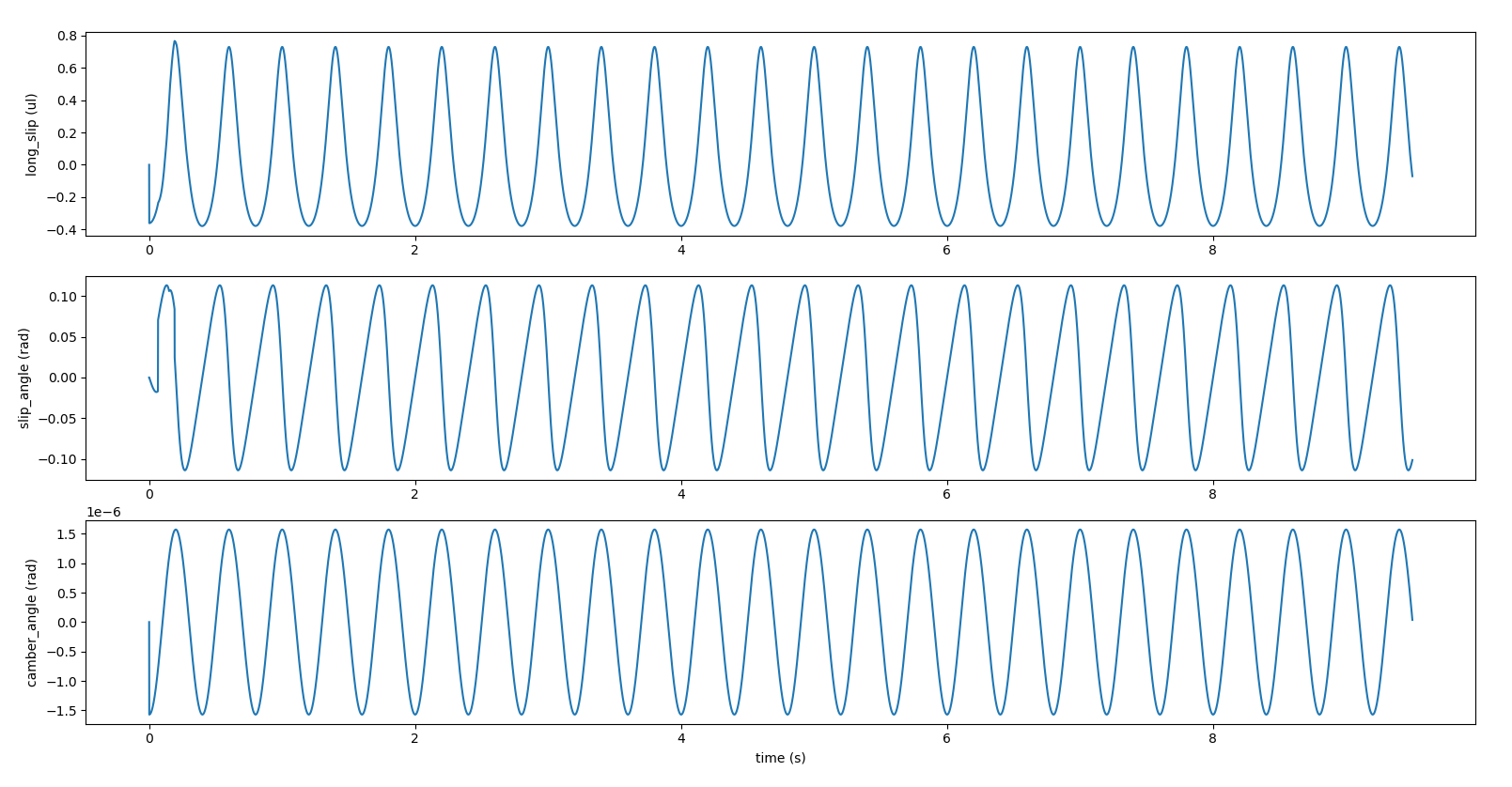
Due to this, I switched to the TMeasyTire, and it is working as intended. Additionally, the changes to reduce noise seem to have worked:
TMeasy on 7.0.3:
TMeasy on 8.0.0:

On Wednesday, January 18, 2023 at 12:15:41 PM UTC-5 James Baxter wrote:
Hi Radu and Rainer,
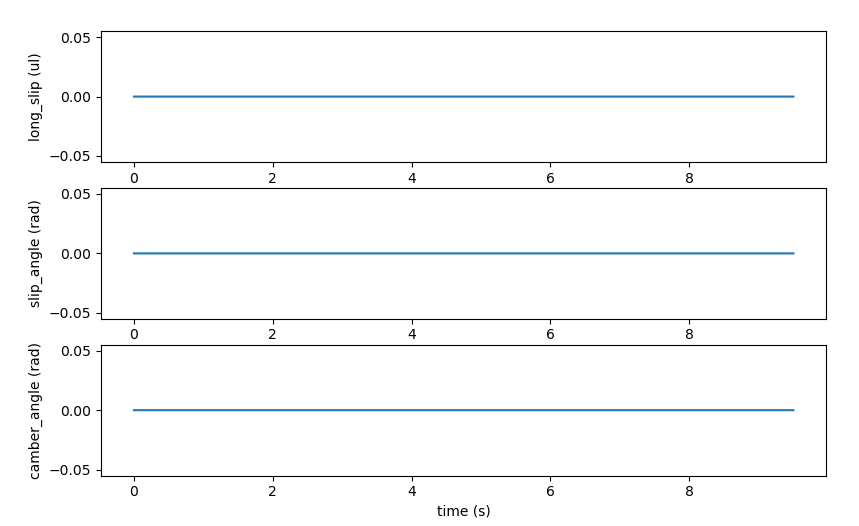
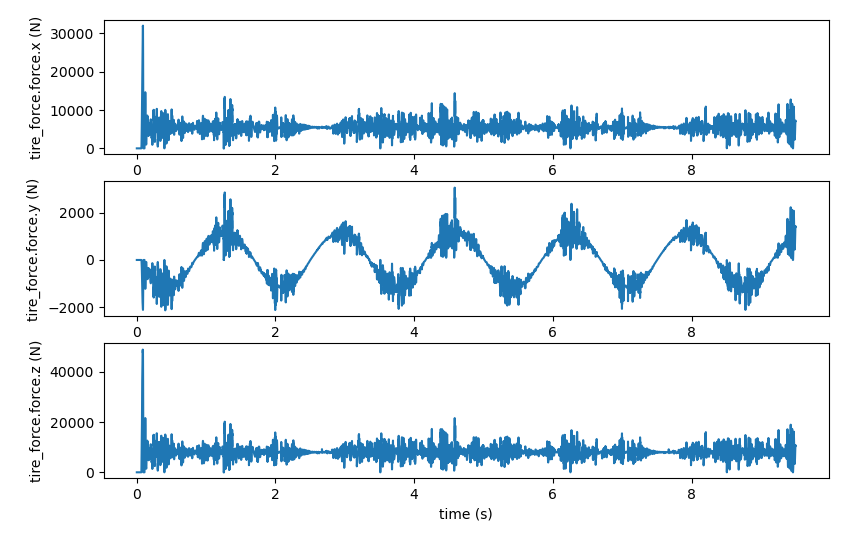
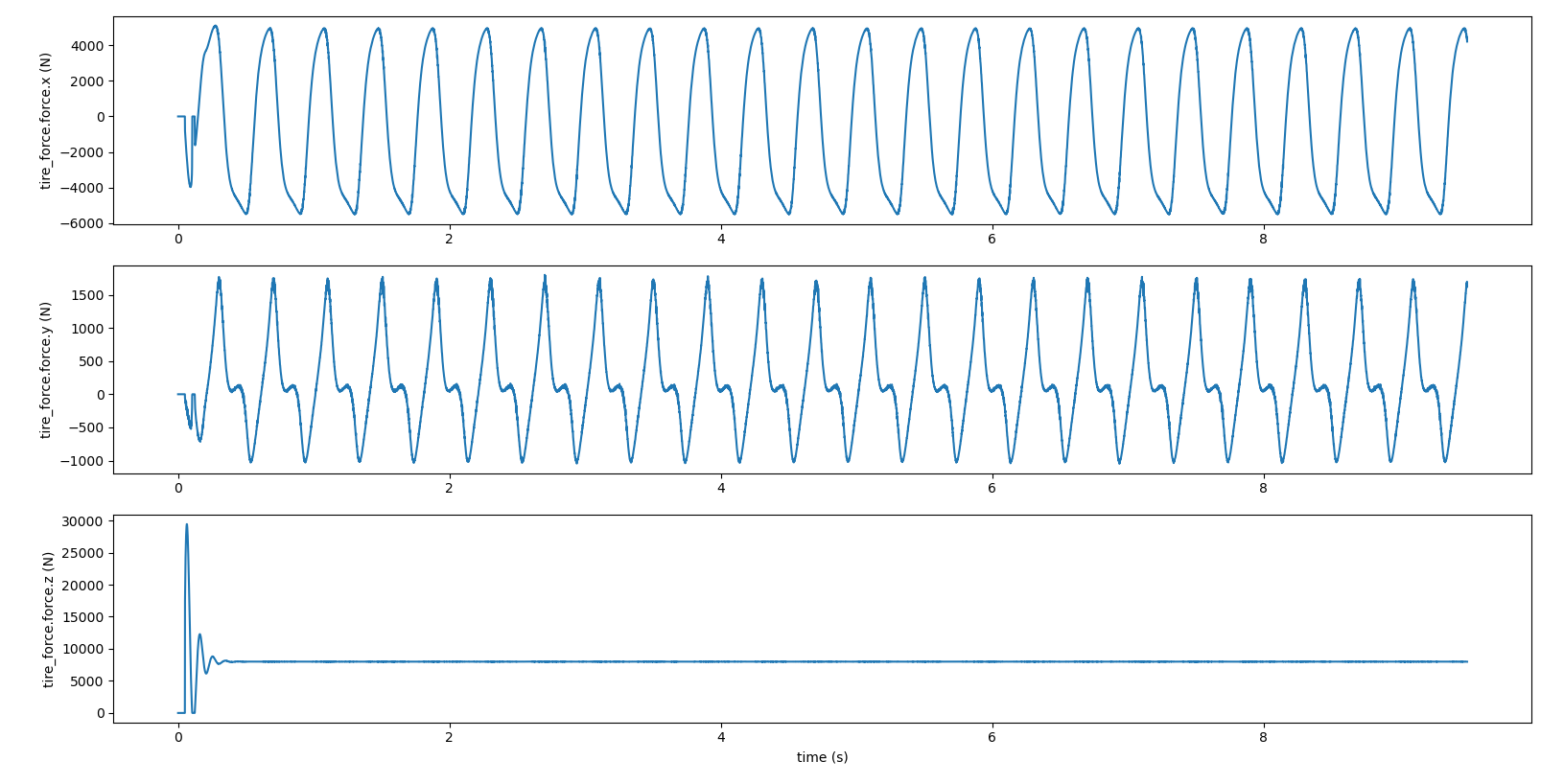
Thank you for pushing some changes for me to test, and sorry for the delayed response. The fix (I am using the 8.0.0 release tag) definitely smoothed out noise on one of the plots (longitudinal slip, slip angle, camber_angle), but I was expecting a sinusoidal shape for the slip angle rather than a flat line. The tire force seems to still have about the same degree of noise. See the below plots.

--
You received this message because you are subscribed to the Google Groups "ProjectChrono" group.
To unsubscribe from this group and stop receiving emails from it, send an email to projectchron...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/e52e6334-9ec7-4a7b-a093-c6085e66839cn%40googlegroups.com.
--
You received this message because you are subscribed to the Google Groups "ProjectChrono" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
projectchron...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/projectchrono/0fa54311-ad17-44e2-941c-8c0f0ce41b77n%40googlegroups.com.
James Baxter
