Problem with z-height when placing components

eklun...@gmail.com

mark maker
I have a suspicion but let Issues & Solutions tell you. 😉
If this does not resolve it, report back.
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/bbd32baa-be4d-45e6-838c-06717d524e7en%40googlegroups.com.
eklun...@gmail.com
eklun...@gmail.com

Mike Menci
On 16 Mar 2023, at 21:03, eklun...@gmail.com <eklun...@gmail.com> wrote:
Hi again,
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c0928dba-22f5-4ecd-a48a-592e9c684cedn%40googlegroups.com.
eklun...@gmail.com
eklun...@gmail.com
I just thought of a real longshot.
Since the nozzle is lowered to board level during checking fiducials, which I suppose it shall not do, and not during placing of components, I just wonder if there is some mixing of these two functions???
I admit it sounds absurd, but I will give it a try later today and swap types.
I did try the fiducials on the older software and I can not recall that the nozzles were lowered then. I did not try the placing on that version so unfortunately I can not say how it worked before the update.
As I said, this is on real longshot and it is highly unlikely this is the case.
I work as a software developer myself so I can see how bizarre this sounds, but stranger things have happened 😊
mark maker
> Today I have gone throu all Issues & Solutions. Unfortunately the problem is still there.
OK, so it wasn't the virtual and real Z axis being confused.
No, please send the machine.xml
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c0928dba-22f5-4ecd-a48a-592e9c684cedn%40googlegroups.com.
mark maker
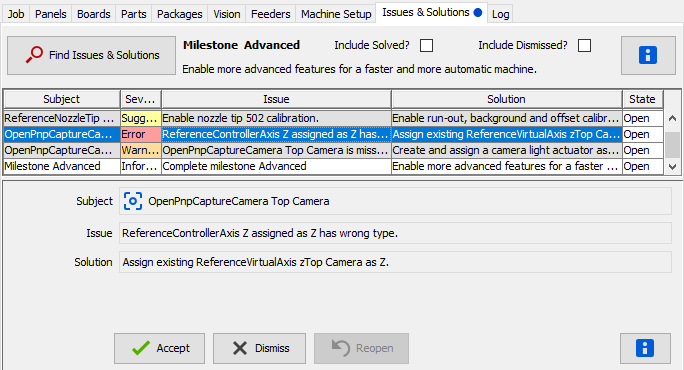
You need to assign the virtual Z axis to the camera:

It likely also solves the other issue, but not 100% sure. Please
report back.
I was mistaken to assume that Issues & Solutions would pick
that up. I'll add this now.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9e6a338b-f53c-4c95-a15b-49f7ff014fa4n%40googlegroups.com.
eklun...@gmail.com
mark maker
The one thing that comes to mind would be a part height that was huge, i.e. practically equal to the Z difference from board to safe Z.
It that is not it, please send a log at TRACE level of such a
"placement" (or rather "drop").
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d34168fa-3e54-4ba4-8f9f-c891ed467bc1n%40googlegroups.com.
eklun...@gmail.com
eklun...@gmail.com

mark maker
See in the log starting here
2023-03-17 15:39:37.734 ReferenceNozzle DEBUG: N1.place()
then it wants to move Z to -90° (more about that later)
2023-03-17 15:39:37.738
GcodeAsyncDriver DEBUG: serial://COM9 commandQueue.offer(M204
S40960 G1 Z-90.0 F38400 ; move to target, 10000)...
then the controller complains
2023-03-17 15:39:37.782
GcodeDriver$ReaderThread TRACE: [serial://COM9] << Error: Soft Endstop Z was exceeded - entire
move ignored
later the position report confirms that
2023-03-17 15:39:38.285
GcodeDriver TRACE: Position report: ok C: X:117.1200 Y:141.7020
Z:0.0000 A:6.1000 B:180.0000 C:6.0000 E:0.0000
and OpenPnP notes the discrepancy, but because we cannot rule out
these, this is not flagged as an error:
2023-03-17 15:39:38.285
AbstractMotionPlanner DEBUG: Reported location changes current
location from (X:117.120142, Y:141.681445, Z:-90.000000,
N1:6.067218, N2:180.000000) to
Finally it drops the part
2023-03-17 15:39:38.286 ReferenceActuator DEBUG: N1VAC.actuate(false)
The -90° likely indicates that the cam cannot go that low in Z.
So either your machine cannot go to the PCB, which I doubt since it seems to be an unmodified CHMT, or more likely you have the Cam Radius set too small here:
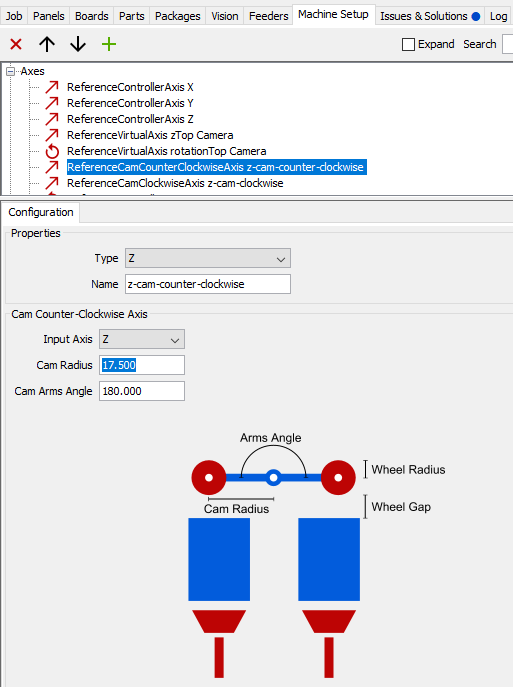
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/417e77a9-d81a-4b18-a0d2-460689899d1bn%40googlegroups.com.

tonyl...@gmail.com
mark maker
> You need to assign the virtual Z axis to the camera...
This issue is now detected by Issues & Solutions, it will suggest to assign the correct virtual axis (if one exists):
https://github.com/openpnp/openpnp/pull/1535
Available in the test version of OpenPnP, allow some minutes to deploy.
In case you're wondering about virtual axes, see:
https://github.com/openpnp/openpnp/wiki/Machine-Axes#referencevirtualaxis
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/12cda9ff-6625-5a00-01cb-72aba390a60c%40makr.zone.
mark maker
>> So either your machine cannot go to the PCB,
which I doubt since it seems to be an unmodified CHMT,
>> or more likely you have the Cam Radius set too small
> Are you sure you have the board Z set correctly? From the job.xml file it looks like you have it set at -35.8 and from your machine.xml file I see your feeders are at -11.0. From watching your video, it appears they are closer together than that.
Ah yes, the third and likely correct explanation.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d7239b74-c0db-4622-ad27-d7abeb92c6f6n%40googlegroups.com.
eklun...@gmail.com

Jan
Your PCB-Z is far outside the max. Z travel of the stock CHM-T head. It
should be around -10mm. (about 1mm higher then the feeder)
Jan
On 16.03.2023 21:17, eklun...@gmail.com wrote:
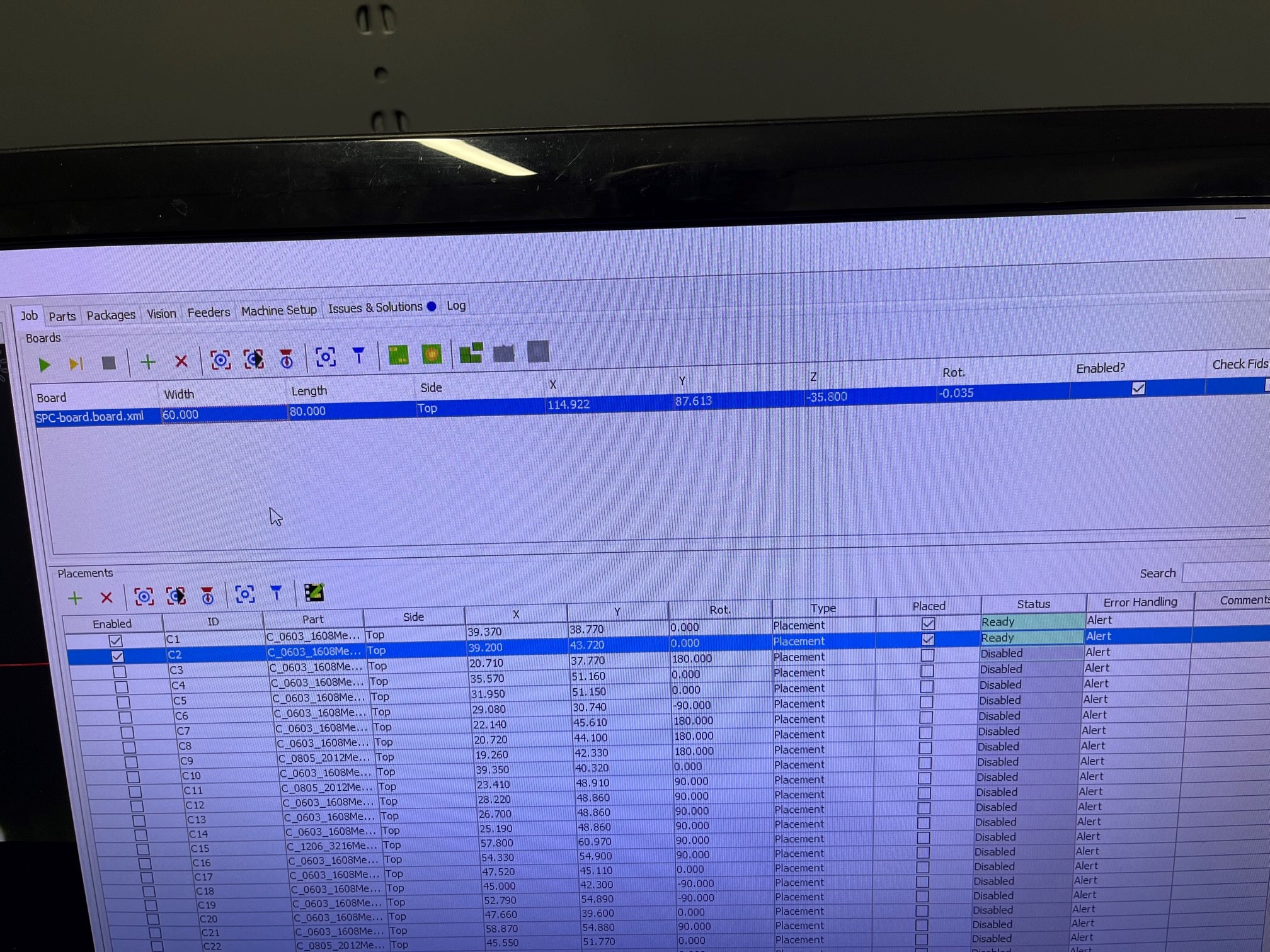
> I have a photo.
> On the screen it is -35.8
> In job.xml it is:
> <location units="Millimeters" x="114.92177765222343" y="87.61263293916895" z="-35.8" rotation="-0.035204889861395305"/>
> In board.xml it
> is:<dimensions units="Millimeters" x="60.0" y="80.0" z="0.0" rotation="0.0"/>
>
>
> torsdag 16 mars 2023 kl. 21:08:07 UTC+1 skrev mike....@gmail.com:
>
> Hi,
> Please see what is the hight of your PCB in the code !
> Can you send a screen shot ?
>
>
> Mike
>
> Sent from my iPhone
>
>> On 16 Mar 2023, at 21:03, eklun...@gmail.com <eklun...@gmail.com>
>> wrote:
>>
>> Hi again,
>>
>> Today I have gone throu all Issues & Solutions. Unfortunately the
>> problem is still there.
>> Maybe it is best to start all over with a fresh instalation?
>>
>> --Per
>> torsdag 16 mars 2023 kl. 11:00:19 UTC+1 skrev eklun...@gmail.com:
>>
>> Thanks for your quick respons Mark!
>> I will throu Issues & Solutions and report back.
>>
>> --Per
>>
>> torsdag 16 mars 2023 kl. 10:30:15 UTC+1 skrev ma...@makr.zone:
>>
>> If this does not resolve it, report back.
>>
>> _Mark
>>
>> On 16.03.2023 10:19, eklun...@gmail.com wrote:
>>> Hi all,
>>>
>>> I have finally started up my Charmhigh that is converted
>>> to OpenPnp.
>>> There are two things that I don't know how to fix even
>>> thou I have googled for this quite a lot.
>>>
>>> 1. When I place components in a job the nozzle is not
>>> lowered to the board. The component is dropped at zero
>>> hight even thou I have set a height for the board.
>>> Video on this isue: Dropping components instead of
>>> placing them
>>> 2. If I check the fiducials at job start the nozzle is
>>> lowered to board height and is at that level for all
>>> fiducials, even during move.
>>> Maybe I can set a z-hight on the fiducials to avoid this,
>>> but it is a strange behavior.
>>> No Video.
>>>
>>> I got an update of OpenPnP yesterday so I should be on
>>> the latest version.
>>>
>>> Thanks for any advice on this.
>>> --Per
>>> --
>>> You received this message because you are subscribed to
>>> the Google Groups "OpenPnP" group.
>>> To unsubscribe from this group and stop receiving emails
>>> from it, send an email to openpnp+u...@googlegroups.com.
>>> To view this discussion on the web visit
>> --
>> You received this message because you are subscribed to the Google
>> Groups "OpenPnP" group.
>> To unsubscribe from this group and stop receiving emails from it,
>> send an email to openpnp+u...@googlegroups.com.
>> To view this discussion on the web visit
> --
> You received this message because you are subscribed to the Google
> Groups "OpenPnP" group.
> To unsubscribe from this group and stop receiving emails from it, send
> an email to openpnp+u...@googlegroups.com

Wayne Black
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d40c51ed-7a75-6410-c4b2-b00a8502327d%40googlemail.com.

mark maker
> I just assumed this was translation of linear length to
rotational degree of the arm.
Yes, if you're looking at G-code in the log. Or on the raw Z axis itself, e.g. the Safe Z and Soft Limit coordinates.
But this should never appear as "Z" anywhere in the OpenPnP DRO or captured coordinates.
> I dont fully understand it, and it works so I dont give it much thought.
Healthy attitude. 😎
But if you or anybody else ever wanted to know more...
https://github.com/openpnp/openpnp/blob/af43024e03f6d9e98c738cff8fb1424be52c487b/src/main/java/org/openpnp/machine/reference/axis/ReferenceCamCounterClockwiseAxis.java#L141-L163_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CABUTZN_Xn0q8b5ZpV3XWGhk5YtbX_MjV-bnC484GRyuB0gkA-g%40mail.gmail.com.
Wayne Black
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/83330b18-40c3-8ee4-2d13-0af98f274068%40makr.zone.
mark maker
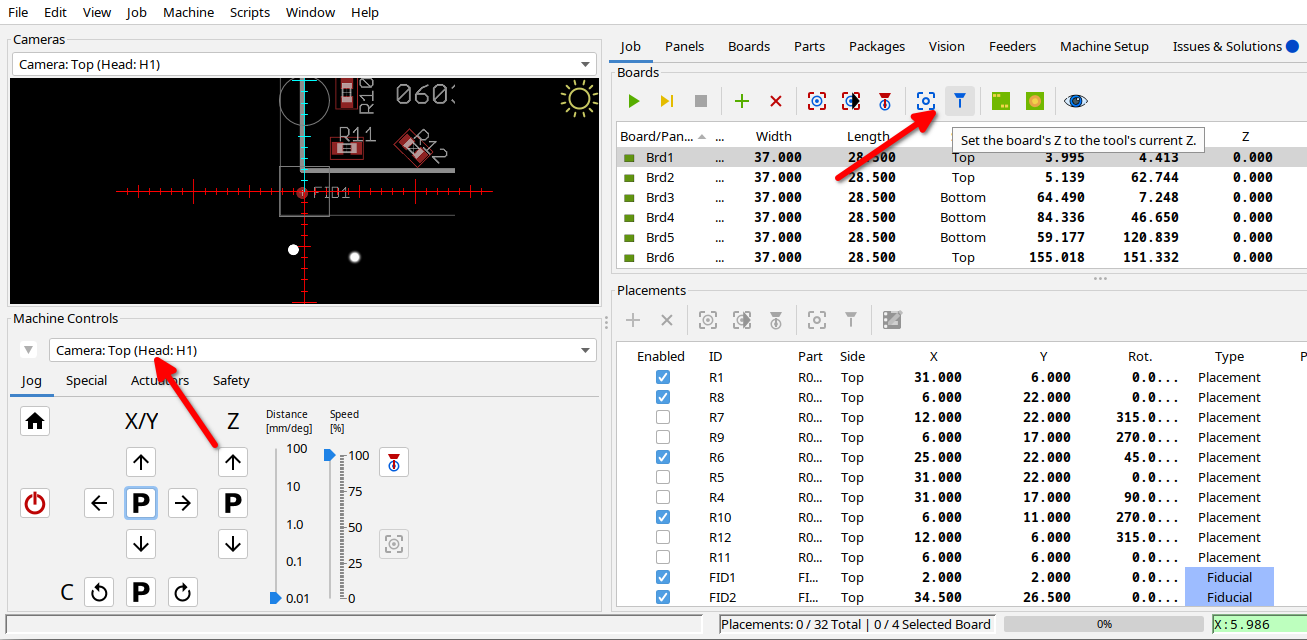
It just occurred to me: Per (OP) had the raw Z axis assigned to his camera Z:
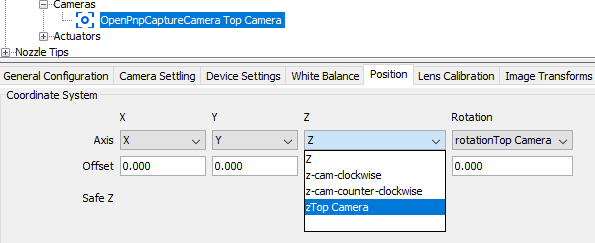
So chances are he had the camera selected as tool in Machine
Controls, then pressed the "Set the board's Z to the tools's
current Z" button. That would indeed have taken the current raw
Z axis coordinate as the board Z. See screenshot:
> I see it when manually jogging either nozzle and
attempt to exceed SW limit.
Yes, those are the Soft Limits on the raw Z axis itself,
as I mentioned. Limited is the rotation of the rotary cam [angle
in degrees], not the nozzle Z per se.
The cam rotary axis should be named "ZN" (short for "Z for
Nozzles") by default by the Issues & Solutions
nozzle solution, to make it clear it is not "just Z". And
the transformed nozzle Z axes are named "Z1" and "Z2".
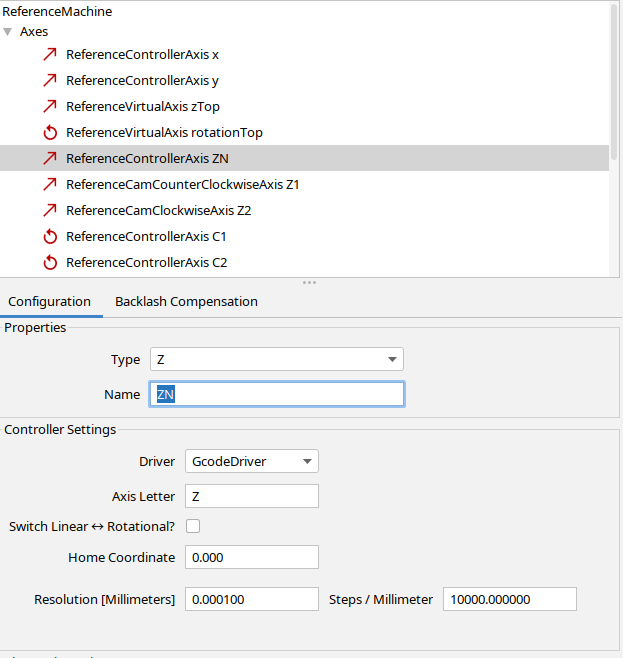
But I see it the raw Z just named "Z" in Per's config, so maybe
some CHMT template machine.xml you
all use as a starting point has made this more confusing than
necessary.
Just go to the raw Z axis and rename it "ZCamRot" or
something, so on the next such error message, it will be clear
what it relates to.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CABUTZN8Zf3-R0WAo5JXvC%2BjgetFM6Lj2bmKy-9YDtTCbiKCZKA%40mail.gmail.com.
Wayne Black

To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f1d983a2-61ea-afa2-375b-89ae104dffde%40makr.zone.
mark maker
Wayne, perhaps read my post again.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CABUTZN_PaBk9S7Qh2fi99b%2BdSiZaJyLZh5vFSFXcu6FwA2-pKA%40mail.gmail.com.
eklun...@gmail.com

Jarosław Karwik



