Smoothie board + OpenPNP help

Rashad Arif

Arthur Wolf
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/53d06077-a28b-4fda-b3f6-74d8389b9e6bn%40googlegroups.com.
--
勇気とユーモア
Rashad Arif

To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAMHZkm78SwxMJvfH0EC_nmPrPE7dCqt40d%2BwqZvKodACWXpC4w%40mail.gmail.com.

Lance Endres

Duncan Ellison
Arthur Wolf
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d4748cd2-ee60-47fb-ab31-77bfbc9f6f39n%40googlegroups.com.
--
勇気とユーモア
Rashad Arif

will be posted .
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c0b235e3-80f6-468c-bc8d-7e56cd97c68dn%40googlegroups.com.
Rashad Arif
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/rdAXltRoSdc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d4748cd2-ee60-47fb-ab31-77bfbc9f6f39n%40googlegroups.com.

Balbeer Bohra
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpu%2BqUn-CF7TYkH7rKoU_fgCc9e4M-1feMaFEb8wkfbTkSg%40mail.gmail.com.
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAMHZkm702kk9SWfk6qsEjR2ppTuTE5awywfmJeN27LGUr6h1rg%40mail.gmail.com.
Arthur Wolf
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuKokXQrCjtUVy23MyK9AZ2mRF-t-_dreFBE4q61%2BvvuaA%40mail.gmail.com.
--
勇気とユーモア
Rashad Arif
The X,Y and Z are working now after adding the line :
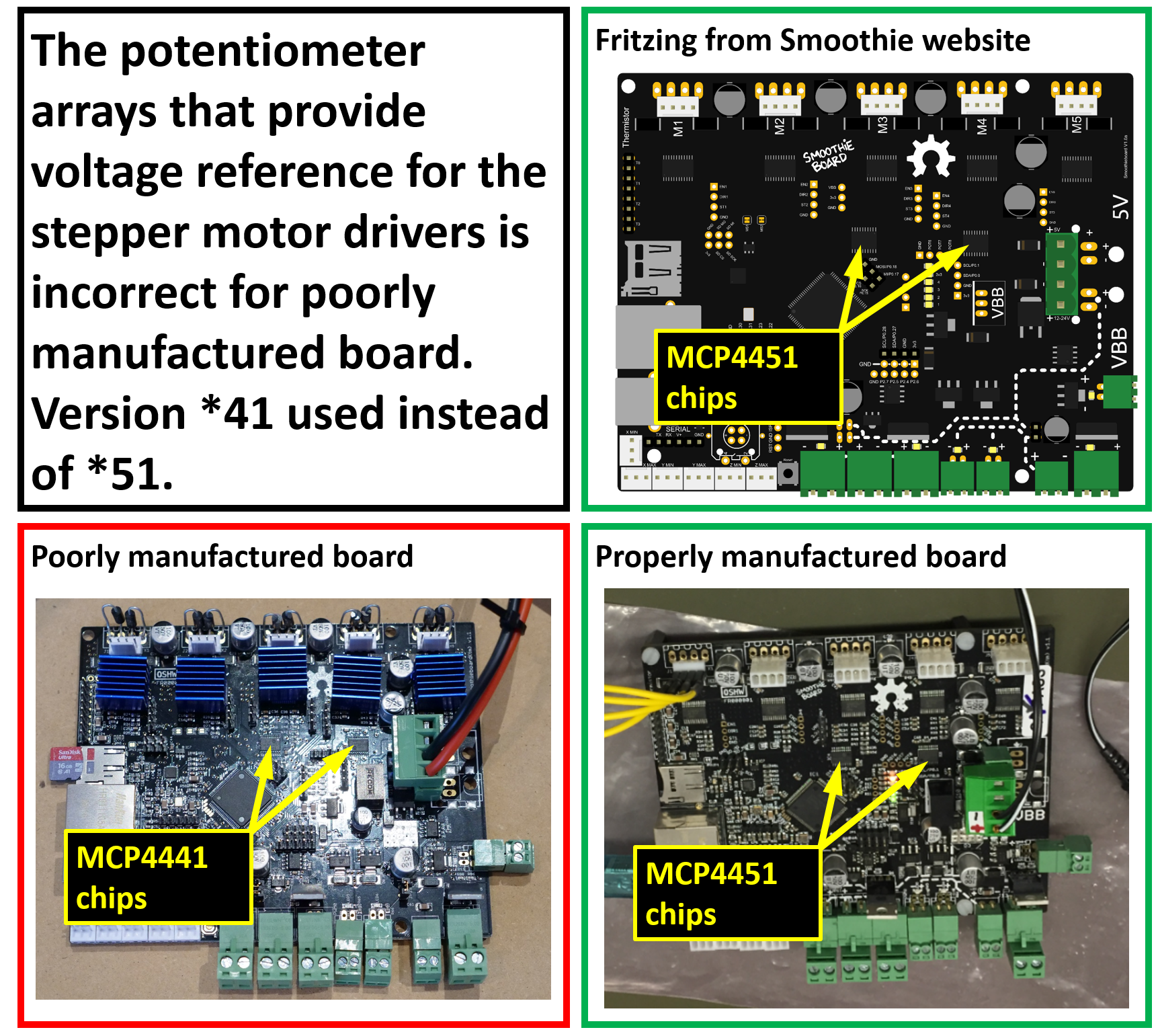
# Fix for incorrect Digipots used on Smoothieboard Clones.
digipot_factor 36.6
[ https://forum.makerforums.info/t/aliexpress-fysetc-smoothieboard-v1-1-mcp4441-issue/77926 ]
about the smoothieboard V1.1 MCP4441 issue
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAMHZkm4nfCUH8WfGqGOdxu0Etfbe8ee1hVL9_8GryhJJdzE9yg%40mail.gmail.com.
Rashad Arif

bert shivaan
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuJgUrWMaCff-oo1_mYNhmrUXXNTtv%3DGLMG%3DOgeP8uV9kg%40mail.gmail.com.
Rashad Arif
2021-02-07 22:45:31.424 AbstractHeadMountable DEBUG: Top.moveTo((20.000000, 120.000000, 200.000000, 4.865117 mm), 0.96)
2021-02-07 22:45:35.049 AbstractHeadMountable DEBUG: Top.moveTo((30.000000, 120.000000, 200.000000, 4.865117 mm), 0.96)
2021-02-07 22:45:37.449 AbstractHeadMountable DEBUG: Top.moveTo((30.000000, 110.000000, 200.000000, 4.865117 mm), 0.96)
2021-02-07 22:45:39.574 AbstractHeadMountable DEBUG: Top.moveTo((20.000000, 110.000000, 200.000000, 4.865117 mm), 0.96)
2021-02-07 22:45:42.649 ReferenceMachine DEBUG: setEnabled(false)
2021-02-07 22:45:42.677 ReferenceMachine INFO: setHomed(false)
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BKNHNxmy%3DLtuGSCncPMR6tKbxXphLyuSZi6aNw0w__yYpXrFQ%40mail.gmail.com.
Rashad Arif
2021-02-07 23:10:17.633 ReferenceMachine INFO: setHomed(false)
2021-02-07 23:10:19.302 ReferenceMachine DEBUG: setEnabled(true)
2021-02-07 23:10:21.580 AbstractHeadMountable DEBUG: N1.moveTo((0.000000, 490.000000, 400.000000, 0.000000 mm), 0.96)
2021-02-07 23:10:21.581 ReferenceNozzle TRACE: N1.transformToHeadLocation((0.000000, 490.000000, 400.000000, 0.000000 mm), ...)
2021-02-07 23:10:36.948 AbstractHeadMountable DEBUG: N1.moveTo((100.000000, 490.000000, 400.000000, 0.000000 mm), 0.96)
2021-02-07 23:10:36.948 ReferenceNozzle TRACE: N1.transformToHeadLocation((100.000000, 490.000000, 400.000000, 0.000000 mm), ...)
2021-02-07 23:10:38.843 AbstractHeadMountable DEBUG: N1.moveTo((100.000000, 390.000000, 400.000000, 0.000000 mm), 0.96)
2021-02-07 23:10:38.844 ReferenceNozzle TRACE: N1.transformToHeadLocation((100.000000, 390.000000, 400.000000, 0.000000 mm), ...)
2021-02-07 23:10:39.622 AbstractHeadMountable DEBUG: N1.moveTo((100.000000, 490.000000, 400.000000, 0.000000 mm), 0.96)
2021-02-07 23:10:39.623 ReferenceNozzle TRACE: N1.transformToHeadLocation((100.000000, 490.000000, 400.000000, 0.000000 mm), ...)
2021-02-07 23:10:40.725 ReferenceMachine DEBUG: setEnabled(false)
2021-02-07 23:10:40.735 ReferenceMachine INFO: setHomed(false)
bert shivaan
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuK-LKKq%3DpBzhMWbGyK8YCf1%2B1vC0XY18d3MCKG4wAkJAA%40mail.gmail.com.
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BKNHNxjeRXToNbvFp%3DUrenUrNjfOkgyhvNhVe9VbFW9SXxw_w%40mail.gmail.com.
Rashad Arif

bert shivaan
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuJLfR5OQQw_XVYvi%3DsvCfeO-P6iPEiPLDwC8GC4Oho_-Q%40mail.gmail.com.
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BKNHNxvUyxBP6q4zkMJOGhFqUX1oPDVjEXGNeBguJ1JP5WHgQ%40mail.gmail.com.
Rashad Arif
2021-02-08 00:27:26.964 AbstractHeadMountable DEBUG: Top.moveTo((200.000000, 100.000000, 0.000000, 0.000000 mm), 0.88)
2021-02-08 00:27:26.966 GcodeDriver DEBUG: [serial://COM9] >> G0 X100, 5000
2021-02-08 00:27:26.967 GcodeDriver WARNING: GcodeDriver configuration error: COMMAND_CONFIRM_REGEX missing. Not waiting for confirmation.
2021-02-08 00:27:33.783 AbstractHeadMountable DEBUG: Top.moveTo((200.000000, 0.000000, 0.000000, 0.000000 mm), 0.88)
2021-02-08 00:27:33.785 GcodeDriver DEBUG: [serial://COM9] >> G0 X100, 5000
2021-02-08 00:27:33.785 GcodeDriver WARNING: GcodeDriver configuration error: COMMAND_CONFIRM_REGEX missing. Not waiting for confirmation.
2021-02-08 00:27:40.285 ReferenceHead DEBUG: H1.moveToSafeZ(0.88)
2021-02-08 00:27:40.285 AbstractHeadMountable DEBUG: N1.moveToSafeZ(0.88)
2021-02-08 00:27:40.285 ReferenceNozzle TRACE: N1.transformToHeadLocation((200.000000, 0.000000, 0.000000, 0.000000 mm), ...)
2021-02-08 00:27:40.286 ReferenceNozzle TRACE: N1.transformToHeadLocation((200.000000, 0.000000, 0.000000, 0.000000 mm), ...)
2021-02-08 00:27:40.286 AbstractHeadMountable DEBUG: Top.moveToSafeZ(0.88)
2021-02-08 00:27:40.286 AbstractHeadMountable DEBUG: Top.moveTo((0.000000, 0.000000, NaN, NaN mm), 0.88)
2021-02-08 00:27:40.288 GcodeDriver DEBUG: [serial://COM9] >> G0 X100, 5000
2021-02-08 00:27:40.288 GcodeDriver WARNING: GcodeDriver configuration error: COMMAND_CONFIRM_REGEX missing. Not waiting for confirmation.

tony...@att.net

Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/fe38675c-2271-43d5-8a39-30b8ecf7bef9n%40googlegroups.com.
Rashad Arif

Arthur Wolf
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuJiNbnaf54GgRuW%3Db8Wm-FCEPyNPd8crsN-TGh4UX7yUw%40mail.gmail.com.
--
勇気とユーモア
tony...@att.net
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/007495c8-2594-4e63-865e-9cb004aaf28bn%40googlegroups.com.

ma...@makr.zone
Issues & Solutions does not solve the problems directly, you need to read what the problem is, perhaps consult the documentation that is offered with the [i] button and then Accept or Dismiss them.
What has Issues & Solutions listed?
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuLSvuubeJMcEkstswxohG_K23FhjZSvsL%2BLgV%3DVy7ToyQ%40mail.gmail.com.
Rashad Arif

To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8fe502fb-840e-f046-f595-ca0eca437a13%40makr.zone.
Rashad Arif
[ <move-to-command>G0 {X:X%.4f} {Y:Y%.4f} {Z:Z%.4f} {Rotation:E%.4f} F{FeedRate:%.0f}
M400</move-to-command>]
Now I have X,Y running slow and Z axis not. So for the beginner to run the x y and z for testing you have to add command line above in drives section and it is don eazy way by [ MAchine Setup >>> Drivers >> GcodeDriver >> Gcode >> Default ] select "Move_To_Command '' and write now "G0 {X:X%.4f} {Y:Y%.4f} {Z:Z%.4f} {Rotation:E%.4f} F{FeedRate:%.0f} " that is all and the same struction you can used it for another commands.
For me right now I have X+Y are slow and Z not running .. any tip for changing the machine speed and acceleration axes. many thanks
ma...@makr.zone
Why don't you use Issues & Solutions?
It has a better way to setup all these configurations for you.
Watch the video here and ask specifically then things are not
clear:
https://github.com/openpnp/openpnp/wiki/Issues-and-Solutions
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpuLDMVJJtmfw9tvEP8wGFcW2YHa-xVxqrtbCO9xfh9Ec8g%40mail.gmail.com.
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/371f0225-153f-15ff-965c-664cb9d6c073%40makr.zone.
ma...@makr.zone
Once you have everything setup you can tune the machine speed on the axes in detail. By tuning each axis individually you can achieve much better machine speed:
https://github.com/openpnp/openpnp/wiki/Machine-Axes#kinematic-settings--rate-limits
IMPORTANT: Before you can tune the
machine this way you must be sure to configure the same or
higher limits in the controller. Refer to the controller
documentation to see how.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAObNpu%2B47RkAmN7Ub_eQKC1699d_gMOJa6%2BCCFppozQh4nVmpg%40mail.gmail.com.
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/dc14d10e-b22f-664d-962d-e6942af0b45b%40makr.zone.
Rashad Arif
digipot_factor 36.6]
to fix for incorrect Digipots used on Smoothieboard Clones.
Maybe i have to use an external motor driver to reach a good current or maybe you have a tip to solve the problem ?
Thanks
Duncan Ellison
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/ae405744-cf34-4899-a609-b7fac1837822n%40googlegroups.com.

3d.m...@gmail.com
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/dfd1a1d9-7bc3-4e7e-a5bf-513bd2e54a74n%40googlegroups.com.
Duncan Ellison
4. Forget backlash until you have the machine moving as you expect, this is fine tuning you don't need for now.
ma...@makr.zone
Just FYI Duncan, that jerk limit is quite low. Are you sure you
need it?
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/82ea9845-04c0-4187-87d9-7844fbceeaf1n%40googlegroups.com.
Rashad Arif
4. Forget backlash until you have the machine moving as you expect, this is fine tuning you don't need for now.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/67a80050-4dcf-7605-0942-e9349fc17902%40makr.zone.
Duncan Ellison
Duncan Ellison
Rashad Arif
The problem has been solved for me after connecting the TB6600 external driver for the y-axis.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/aed22ae8-4b2e-4a2c-b986-fd00f2708976n%40googlegroups.com.
Duncan Ellison
Arthur Wolf
Hi Rashad,Since you bought your SmoothieBoard 5X recently and you believe that the digipots were incorrect according to the original BOM, it's pretty certain that you have a Chinese Smoothie Clone . Arthur Woolf from the Smoothie project continuously makes the point that these clones are not made to the same precision as his original ones and it seems that is what you are suffering from here.
Unfortunately, supplies of the original 5X board are simply not available anymore from the Smoothie approved sources, and it's successor is not yet fully available, so this is what we have to work with for now.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/bdf68f01-d40a-4733-9d1f-9b05a98ec8ffn%40googlegroups.com.
--
勇気とユーモア

Don Vukovic
Arthur Wolf
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8df00a90-3f8e-4726-8bb6-9d768f4a55d9n%40googlegroups.com.
--
勇気とユーモア
Don Vukovic
Rashad Arif
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/35d8aa53-7a07-4ffb-b974-4d1a63d8a054n%40googlegroups.com.