I did the trace...
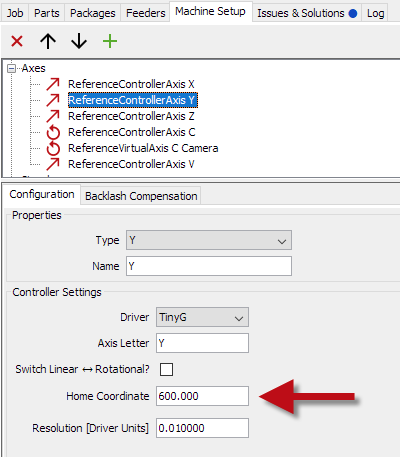
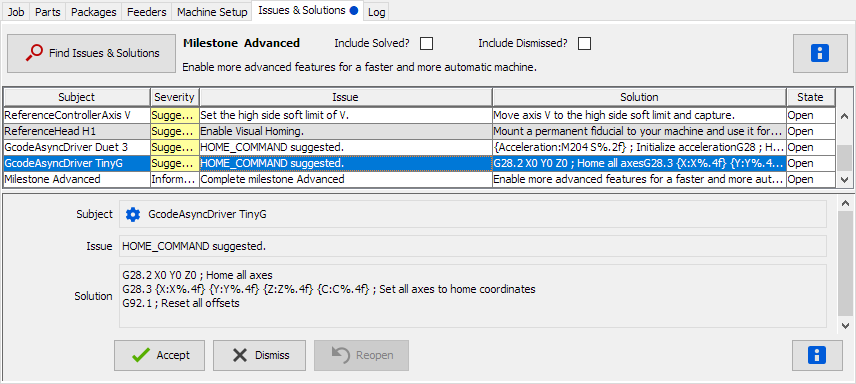
You may be right: Looks like a problem in TinyG.
.
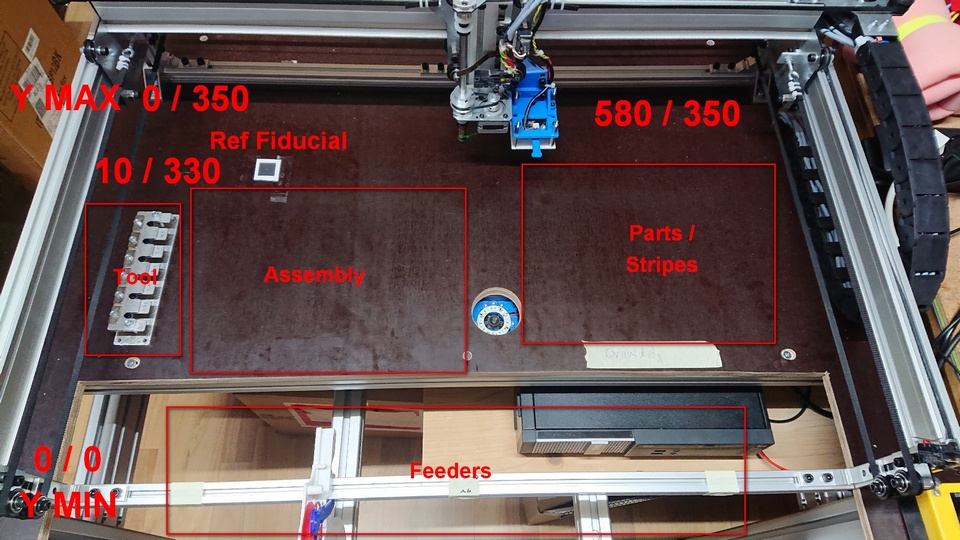
After switch home... it finds fidcucial... (move to target),
.
.
.
2021-09-07 22:29:17.781 ReferenceMachine DEBUG: homing machine
2021-09-07 22:29:17.781 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G28.2 X0 Y0 Z0, -1)...
2021-09-07 22:29:17.781 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G92 X0 Y350 Z0, -1)...
2021-09-07 22:29:17.781 GcodeDriver TRACE: [serial://COM3] confirmed M5
2021-09-07 22:29:17.781 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(;G92 X0 Y0 Z0, -1)...
2021-09-07 22:29:17.781 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M400 ; Wait for moves to complete before returning, -1)...
2021-09-07 22:29:17.781 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M114 ; get position, -1)...
2021-09-07 22:29:17.781 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G28.2 X0 Y0 Z0
2021-09-07 22:29:17.812 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:17.812 GcodeDriver TRACE: [serial://COM3] confirmed G28.2 X0 Y0 Z0
2021-09-07 22:29:17.812 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G92 X0 Y350 Z0
2021-09-07 22:29:17.812 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:0.000,posa:0.000,feed:0.00,vel:0.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:18.144 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:4.246,posa:0.000,feed:1000.00,vel:0.24,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:18.646 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:3.449,posa:0.000,feed:100.00,vel:100.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:19.131 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:2.641,posa:0.000,feed:100.00,vel:100.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:19.532 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:1.986,posa:0.000,feed:100.00,vel:0.51,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:19.732 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:0.000,posz:110.000,posa:0.000,feed:1000.00,vel:0.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:20.233 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:-14.167,posy:0.000,posz:0.000,posa:0.000,feed:2000.00,vel:2000.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:20.719 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:-30.333,posy:0.000,posz:0.000,posa:0.000,feed:2000.00,vel:2000.00,unit:1,coor:0,dist:1,frmo:1,stat:9
...removed
2021-09-07 22:29:26.165 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:-112.239,posy:0.000,posz:0.000,posa:0.000,feed:100.00,vel:0.51,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:26.318 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:-699.000,posy:0.000,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:26.819 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:13.107,posz:0.000,posa:0.000,feed:1800.00,vel:1800.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:27.305 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:27.807,posz:0.000,posa:0.000,feed:1800.00,vel:1800.00,unit:1,coor:0,dist:1,frmo:1,stat:9
... remvoved
2021-09-07 22:29:32.365 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:98.443,posz:0.000,posa:0.000,feed:100.00,vel:0.51,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:32.519 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:499.000,posz:0.000,posa:0.000,feed:1800.00,vel:0.00,unit:1,coor:0,dist:1,frmo:1,stat:9
2021-09-07 22:29:32.519 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.519 GcodeDriver TRACE: [serial://COM3] confirmed G92 X0 Y350 Z0
2021-09-07 22:29:32.534 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> ;G92 X0 Y0 Z0
2021-09-07 22:29:32.534 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:0.000,posy:350.000,posz:0.000,posa:0.000,feed:0.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
2021-09-07 22:29:32.534 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.534 GcodeDriver TRACE: [serial://COM3] confirmed ;G92 X0 Y0 Z0
2021-09-07 22:29:32.534 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M400 ; Wait for moves to complete before returning
2021-09-07 22:29:32.550 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.550 GcodeDriver TRACE: [serial://COM3] confirmed M400 ; Wait for moves to complete before returning
2021-09-07 22:29:32.550 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M114 ; get position
2021-09-07 22:29:32.581 GcodeDriver$ReaderThread TRACE: [serial://COM3] << X:0.0000 Y:350.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:32.581 GcodeDriver TRACE: Position report: X:0.0000 Y:350.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:32.581 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:0.000000, y:350.000000, Z:0.000000, A:0.000000)
2021-09-07 22:29:32.581 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2021-09-07 22:29:32.581 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.581 AbstractMotionPlanner DEBUG: Reported location changes current location from (x:0.000000, y:0.000000, Z:0.000000, A:0.000000) to (x:0.000000, y:350.000000, Z:0.000000, A:0.000000)
2021-09-07 22:29:32.581 ReferenceHead DEBUG: H1.home()
2021-09-07 22:29:32.581 ReferenceFiducialLocator DEBUG: Looking for FIDUCIAL-HOME at (10.000000, 330.000000, 0.000000, 0.000000 mm)
2021-09-07 22:29:32.581 ReferenceHead DEBUG: H1.moveToSafeZ(1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: ContactProbeNozzle.moveToSafeZ(1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: OpenCvCamera.moveToSafeZ(1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: VAC1.moveToSafeZ(1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: PUMP.moveToSafeZ(1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: OpenCvCamera.moveTo((10.000000, 330.000000, 0.000000, 0.000000 mm), 1.0)
2021-09-07 22:29:32.581 AbstractHeadMountable DEBUG: OpenCvCamera.moveTo((10.000000, 330.000000, 0.000000, 0.000000 mm), 1.0)
2021-09-07 22:29:32.597 Scripting TRACE: Scripting.on Camera.BeforeSettle
2021-09-07 22:29:32.597 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M201.3, 15000)...
2021-09-07 22:29:32.597 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G1 X10.0000 Y330.0000 F2000.00 ; move to target, 15000)...
2021-09-07 22:29:32.597 GcodeDriver TRACE: [serial://COM3] confirmed M114 ; get position
2021-09-07 22:29:32.597 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M400 ; Wait for moves to complete before returning, 15000)...
2021-09-07 22:29:32.597 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M114 ; get position, -1)...
2021-09-07 22:29:32.597 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M201.3
2021-09-07 22:29:32.597 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.597 GcodeDriver TRACE: [serial://COM3] confirmed M201.3
2021-09-07 22:29:32.597 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G1 X10.0000 Y330.0000 F2000.00 ; move to target
2021-09-07 22:29:32.619 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:32.619 GcodeDriver TRACE: [serial://COM3] confirmed G1 X10.0000 Y330.0000 F2000.00 ; move to target
2021-09-07 22:29:32.619 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M400 ; Wait for moves to complete before returning
2021-09-07 22:29:33.113 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:6.409,posy:337.181,posz:0.000,posa:0.000,feed:2000.00,vel:2000.00,unit:1,coor:1,dist:0,frmo:1,stat:5
2021-09-07 22:29:33.398 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:10.000,posy:330.000,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
2021-09-07 22:29:33.398 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:33.398 GcodeDriver TRACE: [serial://COM3] confirmed M400 ; Wait for moves to complete before returning
2021-09-07 22:29:33.398 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M114 ; get position
2021-09-07 22:29:33.420 GcodeDriver$ReaderThread TRACE: [serial://COM3] << X:10.0000 Y:330.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:33.420 GcodeDriver TRACE: Position report: X:10.0000 Y:330.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:33.420 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:10.000000, y:330.000000, Z:0.000000, A:0.000000)
2021-09-07 22:29:33.436 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2021-09-07 22:29:33.436 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:33.699 Scripting TRACE: Scripting.on Camera.BeforeCapture
2021-09-07 22:29:33.699 Scripting TRACE: Scripting.on Camera.AfterCapture
2021-09-07 22:29:33.699 Scripting TRACE: Scripting.on Camera.AfterSettle
2021-09-07 22:29:33.784 ReferenceFiducialLocator DEBUG: FIDUCIAL-HOME located at (10.049917, 326.193277, 0.000000, 0.000000 mm)
2021-09-07 22:29:33.784 AbstractHeadMountable DEBUG: OpenCvCamera.moveTo((10.049917, 326.193277, 0.000000, 0.000000 mm), 1.0)
2021-09-07 22:29:33.799 Scripting TRACE: Scripting.on Camera.BeforeSettle
2021-09-07 22:29:33.799 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M201.3, 15000)...
2021-09-07 22:29:33.799 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G1 X10.0499 Y326.1933 F2000.00 ; move to target, 15000)...
2021-09-07 22:29:33.799 GcodeDriver TRACE: [serial://COM3] confirmed M114 ; get position
2021-09-07 22:29:33.799 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M400 ; Wait for moves to complete before returning, 15000)...
2021-09-07 22:29:33.799 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M114 ; get position, -1)...
2021-09-07 22:29:33.799 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M201.3
2021-09-07 22:29:33.815 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:33.815 GcodeDriver TRACE: [serial://COM3] confirmed M201.3
2021-09-07 22:29:33.815 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G1 X10.0499 Y326.1933 F2000.00 ; move to target
2021-09-07 22:29:33.821 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:33.821 GcodeDriver TRACE: [serial://COM3] confirmed G1 X10.0499 Y326.1933 F2000.00 ; move to target
2021-09-07 22:29:33.821 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.070 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:10.050,posy:326.193,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
2021-09-07 22:29:34.070 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.070 GcodeDriver TRACE: [serial://COM3] confirmed M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.070 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M114 ; get position
2021-09-07 22:29:34.101 GcodeDriver$ReaderThread TRACE: [serial://COM3] << X:10.0499 Y:326.1933 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:34.101 GcodeDriver TRACE: Position report: X:10.0499 Y:326.1933 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:34.101 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.101 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:10.049900, y:326.193300, Z:0.000000, A:0.000000)
2021-09-07 22:29:34.101 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2021-09-07 22:29:34.354 Scripting TRACE: Scripting.on Camera.BeforeCapture
2021-09-07 22:29:34.354 Scripting TRACE: Scripting.on Camera.AfterCapture
2021-09-07 22:29:34.354 Scripting TRACE: Scripting.on Camera.AfterSettle
2021-09-07 22:29:34.423 ReferenceFiducialLocator DEBUG: FIDUCIAL-HOME located at (10.000000, 326.117647, 0.000000, 0.000000 mm)
2021-09-07 22:29:34.423 AbstractHeadMountable DEBUG: OpenCvCamera.moveTo((10.000000, 326.117647, 0.000000, 0.000000 mm), 1.0)
2021-09-07 22:29:34.423 Scripting TRACE: Scripting.on Camera.BeforeSettle
2021-09-07 22:29:34.423 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M201.3, 15000)...
2021-09-07 22:29:34.423 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G1 X10.0000 Y326.1176 F2000.00 ; move to target, 15000)...
2021-09-07 22:29:34.423 GcodeDriver TRACE: [serial://COM3] confirmed M114 ; get position
2021-09-07 22:29:34.423 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M400 ; Wait for moves to complete before returning, 15000)...
2021-09-07 22:29:34.423 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M114 ; get position, -1)...
2021-09-07 22:29:34.423 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M201.3
2021-09-07 22:29:34.439 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.439 GcodeDriver TRACE: [serial://COM3] confirmed M201.3
2021-09-07 22:29:34.439 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G1 X10.0000 Y326.1176 F2000.00 ; move to target
2021-09-07 22:29:34.454 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.454 GcodeDriver TRACE: [serial://COM3] confirmed G1 X10.0000 Y326.1176 F2000.00 ; move to target
2021-09-07 22:29:34.454 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.523 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:10.000,posy:326.118,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
2021-09-07 22:29:34.523 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.523 GcodeDriver TRACE: [serial://COM3] confirmed M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.523 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M114 ; get position
2021-09-07 22:29:34.555 GcodeDriver$ReaderThread TRACE: [serial://COM3] << X:10.0000 Y:326.1176 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:34.555 GcodeDriver TRACE: Position report: X:10.0000 Y:326.1176 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:34.555 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:10.000000, y:326.117600, Z:0.000000, A:0.000000)
2021-09-07 22:29:34.555 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2021-09-07 22:29:34.555 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.818 Scripting TRACE: Scripting.on Camera.BeforeCapture
2021-09-07 22:29:34.818 Scripting TRACE: Scripting.on Camera.AfterCapture
2021-09-07 22:29:34.818 Scripting TRACE: Scripting.on Camera.AfterSettle
2021-09-07 22:29:34.902 ReferenceFiducialLocator DEBUG: FIDUCIAL-HOME located at (10.000000, 326.092437, 0.000000, 0.000000 mm)
2021-09-07 22:29:34.902 AbstractHeadMountable DEBUG: OpenCvCamera.moveTo((10.000000, 326.092437, 0.000000, 0.000000 mm), 1.0)
2021-09-07 22:29:34.902 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M201.3, 15000)...
2021-09-07 22:29:34.902 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G1 Y326.0924 F2000.00 ; move to target, 15000)...
2021-09-07 22:29:34.902 GcodeDriver TRACE: [serial://COM3] confirmed M114 ; get position
2021-09-07 22:29:34.902 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(G28.3 X10.0000 Y330.0000 ; reset coordinates, -1)...
2021-09-07 22:29:34.902 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M201.3
2021-09-07 22:29:34.902 ReferenceNozzle DEBUG: ContactProbeNozzle.home()
2021-09-07 22:29:34.902 Scripting TRACE: Scripting.on Machine.AfterHoming
2021-09-07 22:29:34.902 ReferenceMachine INFO: setHomed(true)
2021-09-07 22:29:34.902 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M400 ; Wait for moves to complete before returning, 15000)...
2021-09-07 22:29:34.902 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M114 ; get position, -1)...
2021-09-07 22:29:34.918 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.918 GcodeDriver TRACE: [serial://COM3] confirmed M201.3
2021-09-07 22:29:34.918 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G1 Y326.0924 F2000.00 ; move to target
2021-09-07 22:29:34.924 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.924 GcodeDriver TRACE: [serial://COM3] confirmed G1 Y326.0924 F2000.00 ; move to target
2021-09-07 22:29:34.924 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> G28.3 X10.0000 Y330.0000 ; reset coordinates
2021-09-07 22:29:34.940 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.940 GcodeDriver TRACE: [serial://COM3] confirmed G28.3 X10.0000 Y330.0000 ; reset coordinates
2021-09-07 22:29:34.940 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.987 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:10.000,posy:680.000,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
2021-09-07 22:29:34.987 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:34.987 GcodeDriver TRACE: [serial://COM3] confirmed M400 ; Wait for moves to complete before returning
2021-09-07 22:29:34.987 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M114 ; get position
2021-09-07 22:29:35.018 GcodeDriver$ReaderThread TRACE: [serial://COM3] << X:10.0000 Y:680.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:35.018 GcodeDriver TRACE: Position report: X:10.0000 Y:680.0000 Z:0.0000 A:0.0000 B:0.0000 C:0.0000
2021-09-07 22:29:35.018 GcodeDriver TRACE: GcodeAsyncDriver got lastReportedLocation (x:10.000000, y:680.000000, Z:0.000000, A:0.000000)
2021-09-07 22:29:35.018 GcodeAsyncDriver TRACE: GcodeAsyncDriver confirmation complete.
2021-09-07 22:29:35.018 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:35.018 AbstractMotionPlanner DEBUG: Reported location changes current location from (x:10.000000, y:330.000000, Z:0.000000, A:0.000000) to (x:10.000000, y:680.000000, Z:0.000000, A:0.000000)
2021-09-07 22:29:35.018 ReferenceActuator DEBUG: PUMP.actuate(false)
2021-09-07 22:29:35.025 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M5, 15000)...
2021-09-07 22:29:35.025 GcodeDriver TRACE: [serial://COM3] confirmed M114 ; get position
2021-09-07 22:29:35.025 ReferenceActuator DEBUG: VAC1.actuate(false)
2021-09-07 22:29:35.025 GcodeAsyncDriver DEBUG: serial://COM3 commandQueue.offer(M9, 15000)...
2021-09-07 22:29:35.025 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M5
2021-09-07 22:29:35.025 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:35.025 GcodeDriver TRACE: [serial://COM3] confirmed M5
2021-09-07 22:29:35.025 GcodeAsyncDriver$WriterThread TRACE: [serial://COM3] >> M9
2021-09-07 22:29:35.056 GcodeDriver$ReaderThread TRACE: [serial://COM3] << tinyg [mm] ok>
2021-09-07 22:29:35.056 GcodeDriver$ReaderThread TRACE: [serial://COM3] << posx:10.000,posy:680.000,posz:0.000,posa:0.000,feed:2000.00,vel:0.00,unit:1,coor:1,dist:0,frmo:1,stat:3
Thanks Marko