Vision compositing corner position

Daniel Guerrero

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
mark maker
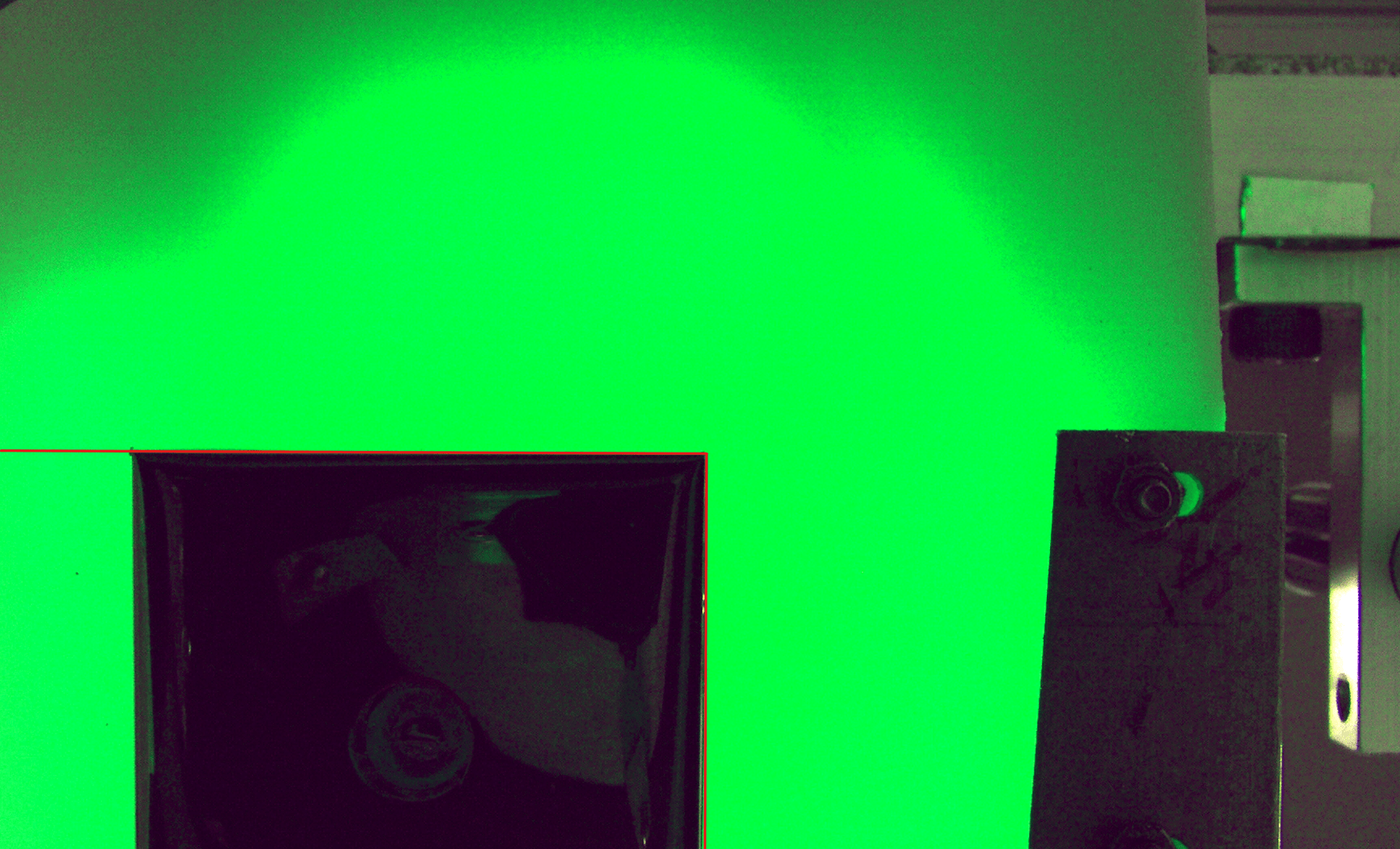
The problem ist that bottom vision normally expects bright elements (contacts) that it detects. It dismisses both green elements and black stuff (usually the plastic body).
So for your use case, you need a pipeline that goes for the green
only.
We had the almost same situation here:
https://groups.google.com/g/openpnp/c/5e3US2kiliU/m/SM7hfeTGBgAJ
if you follow this discussion to the end you should be able to do
it (read it all at once, I forgot some things first and added them
later).
If this is unclear, just ask.
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/6d8a26b6-10c7-4a60-b834-f0d39f8ac229n%40googlegroups.com.
Daniel Guerrero
mark maker
I'm not sure I understand. Are you trying to use the pipeline outside of bottom vision?
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/89cefeda-ff27-4234-9c28-ae38b4386c9fn%40googlegroups.com.
Daniel Guerrero
mark maker
The stage is documented here:
https://github.com/openpnp/openpnp/wiki/MinAreaRect
As you see there (screen shot below), you tell it which edge(s) to detect (subject to rotation by expectedAngle). So it is these edges you can evaluate. The other edges are just arbitrarily shifted out of the camera view, so only the selective edges are visible:
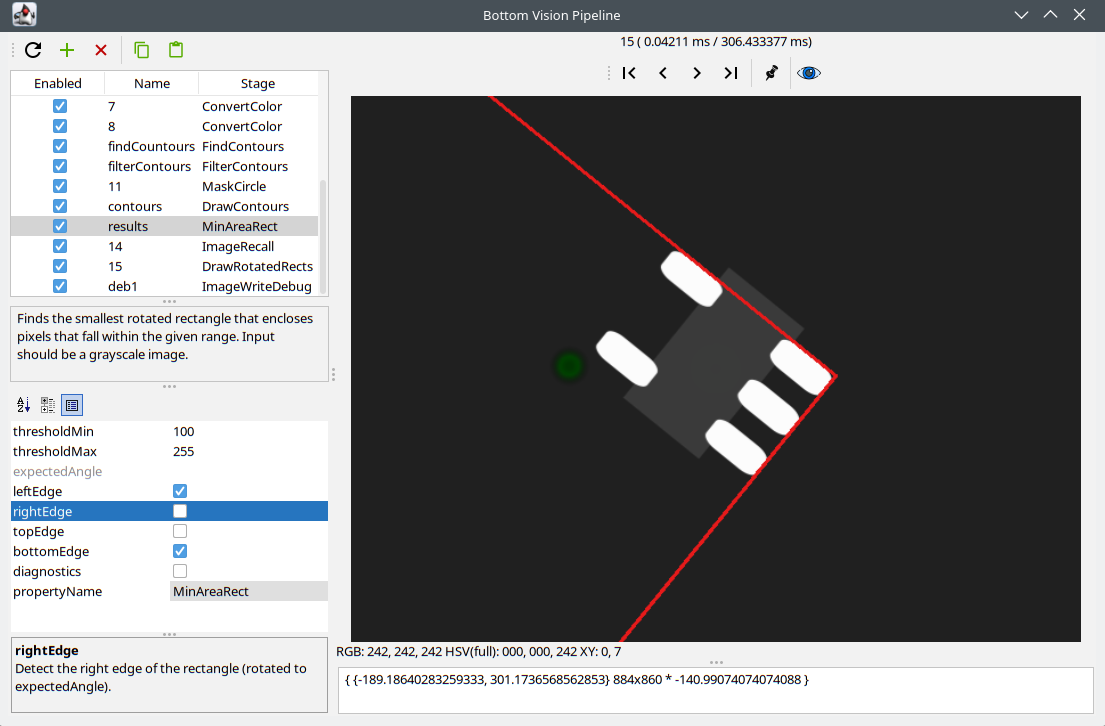
corner = center
+/- (half width/height, rotated by angle)
I cannot help you more specifically if you don't explain to me
how you intend to use this.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/4938180e-f0d1-414a-b6a7-2859bb50732fn%40googlegroups.com.
Daniel Guerrero
mark maker
> We are placing "hand-made" parts that are all
roughly the same size.
I think you could use the whole bottom vision (alignment)
function of OpenPnP for that, instead of trying to build your own
motion, pipeline and math. It would do all the positioning and
calculations for you, including iteration (when you enable
pre-rotate, which is always better, even when no rotation is
needed).
Enter the rough part size as a single pad footprint (not the
body!) of the Package.
Modify the standard pipeline as discussed earlier.
Use regular pick and alignment.
The size will be reported as the end result, as a properly composited RotatedRect (reported in the log, which you could parse).
You could even do a Part Size Check (PadExtents) with
tolerance:
https://github.com/openpnp/openpnp/wiki/Bottom-Vision#part-configuration
If I missed something, tell me. Otherwise, you need to completely let go of your earlier elaborate plans and let OpenPnP do its job 😁
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/27f0825f-aaa2-451b-9bac-38971c835dban%40googlegroups.com.
Daniel Guerrero
Thanks,
Daniel
Daniel Guerrero
Thanks,
Daniel
mark maker
Well that's tricky. As you can guess, the corner detection expects 90° corners.
The only thing that comes to mind is to mask the corners small
enough that the 1.25° don't matter.
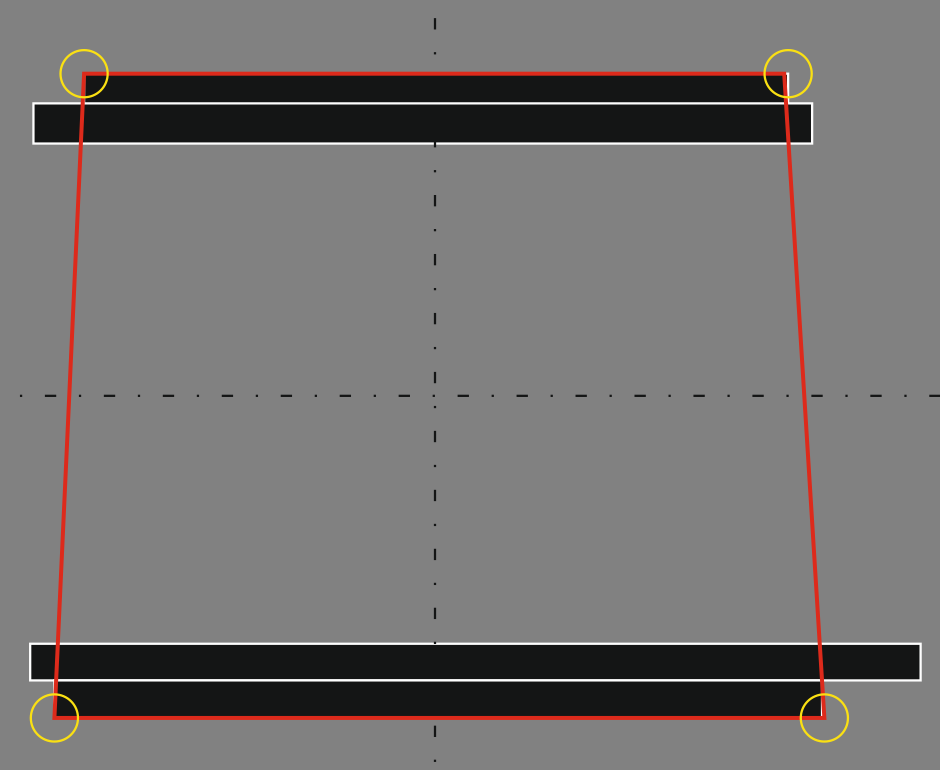
You can trick OpenPnP into doing it by building the "footprint"
out of multiple pads.
The imaginary trapezoid hull must be symmetric in X, and "halfed" in Y.
Two outer bars hug the isosceles trapezoid. There will be a
minimal error due to the 1.25°.
Two inner bars are larger and deliberately asymmetric, so
OpenPnP cannot take them as candidates for corners.
Because these inner bars form a concave hull, OpenPnP must isolate
the corners of the outer bars , i.e. it must apply circular
masks (marked yellow).
The height of the bars is probably difficult to get right:
Large enough so the corner can be well detected. Plus they must
be larger than the pick tolerance of your parts (which must
include the size tolerance).
But small enough, so the 1.25° won't matter.
Note: OpenPnP will give you back the bounding rectangle.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/7c5dc084-0e71-464d-a00c-ca1a60309310n%40googlegroups.com.
Daniel Guerrero
Daniel
mark maker
Not in the pipeline. The pipeline is called separately for each
corner shot, the compositing happens outside the pipeline.
But I could probably collect the detected corner locations and
then add the corner location array to the
Vision.PartAlignment.After script parameters, so you
could do in a script, whatever it is you want to do with that
information.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/04e2cb09-f573-446a-b07f-1466dd234079n%40googlegroups.com.
Daniel Guerrero
{kind=link}
{kind=link}
mark maker
Are you guys paying attention? We should be long past that.
Please re-read my first answer in this conversation, especially the instructions about the pipeline that I linked (my earlier answers to Jim, read until the end).
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/cccf7b86-a902-4148-9981-ed6715a4f29fn%40googlegroups.com.
mark maker
Sorry, my reaction was a bit harsh. Bad work day. 😇 But the
pointers are still valid.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/ad8679ff-cf20-46fd-70bd-9fa6f8b9c64b%40makr.zone.
Daniel Guerrero
Sorry we missed parts of your comments in the other thread! We looked back at it in detail and found the problem in our pipeline. We fixed it, now the compositing gets the four corners of the part (shots attached). Now we are working on reconstructing the overall trapezoid shape.
Thanks again for your help.
Best,
Daniel
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}