Homing error M204 - timeout

jbasia

mark maker
Nope, the original G-code is correct, yours will not work, look
at the syntax for substitution
variables.
Your machine.xml shows proper (but quite low) acceleration limits on the axes, so I don't see why the acceleration is not set right.
However, please listen to Issues & Solutions. It tells you
that the axis velocity is limited by the (very low) driver
feed-rate limit.
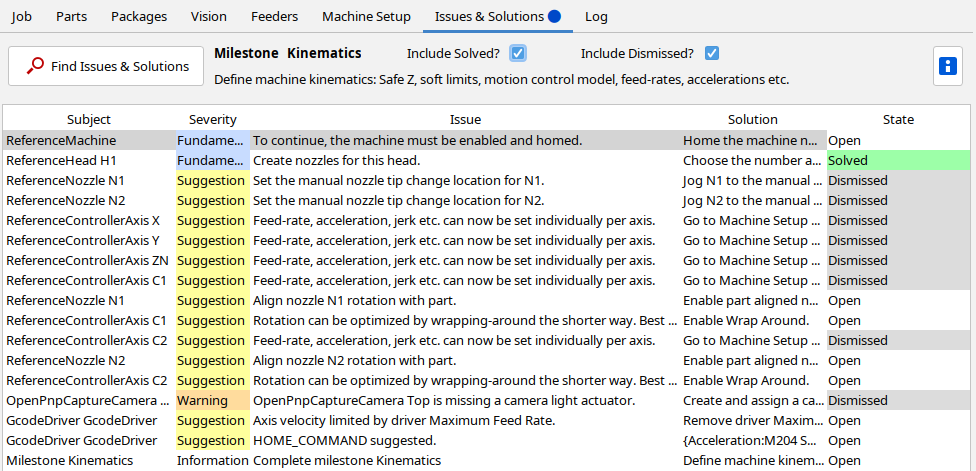
Which however does not explain the homing problem.
Please send a log of your machine homing at Trace level.
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8acac4d0-4b9a-421f-89f0-93a31221233cn%40googlegroups.com.
jbasia
mark maker
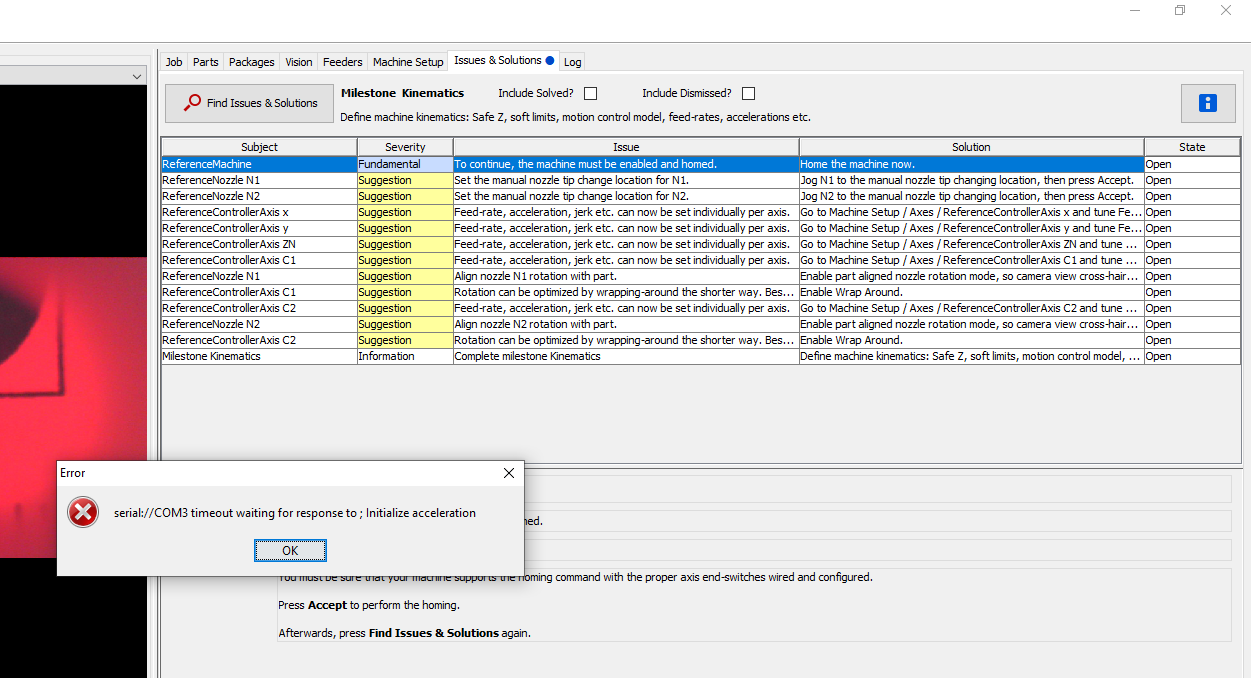
> Pressing the button does nothing. Eventually a timeout
happens.
No sense in offline speculation, as soon as you're at the machine again, please send a log of your machine homing at Trace level.
> Feedrate is that ...?
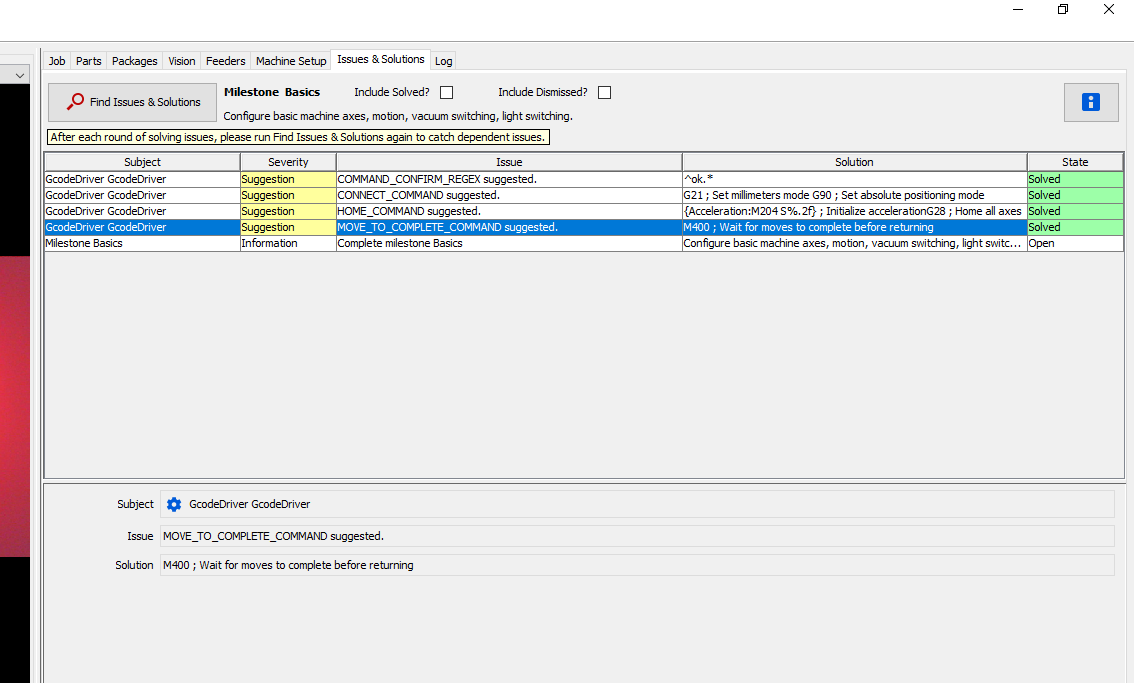
No, just do as Issue & Solutions tells you, press Accept to remove the feed--rate limit from the driver:

It will automatically set this to 0:

_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9b2e84b8-d25f-4c78-964b-6c780b3cae1an%40googlegroups.com.
jbasia

2023-01-30 13:31:59.635 Scripting TRACE: Scripting.on Startup
2023-01-30 13:31:59.653 CameraView DEBUG: Failed to load camera specific reticle, checking default.
2023-01-30 13:31:59.653 CameraView DEBUG: No reticle preference found.
2023-01-30 13:32:20.994 AbstractBroadcastingCamera TRACE: Camera Top thread 30 started.
2023-01-30 13:32:20.995 CameraView DEBUG: Failed to load camera specific reticle, checking default.
2023-01-30 13:32:20.995 CameraView DEBUG: No reticle preference found.
2023-01-30 13:32:23.178 AbstractBroadcastingCamera TRACE: Camera Bottom thread 32 started.
2023-01-30 13:32:23.509 AbstractMachine TRACE: Machine not enabled, task ignored.
2023-01-30 13:33:13.586 AbstractMachine TRACE: Machine not enabled, task ignored.
2023-01-30 13:33:46.813 ReferenceMachine DEBUG: setEnabled(true)
2023-01-30 13:33:49.832 GcodeDriver DEBUG: [serial://COM3] >> G21 ; Set millimeters mode, 20000
2023-01-30 13:33:49.835 GcodeDriver$ReaderThread TRACE: [serial://COM3] << ok
2023-01-30 13:33:49.837 GcodeDriver TRACE: [serial://COM3] confirmed G21 ; Set millimeters mode
2023-01-30 13:33:49.838 GcodeDriver DEBUG: [serial://COM3] >> G90 ; Set absolute positioning mode, 20000
2023-01-30 13:33:49.839 GcodeDriver$ReaderThread TRACE: [serial://COM3] << ok
2023-01-30 13:33:49.841 GcodeDriver TRACE: [serial://COM3] confirmed G90 ; Set absolute positioning mode
2023-01-30 13:33:49.879 ReferenceMachine DEBUG: homing machine
2023-01-30 13:33:49.882 GcodeDriver DEBUG: [serial://COM3] >> ; Initialize acceleration, -1
2023-01-30 13:33:55.073 GcodeDriverSolutions WARNING: GcodeDriver failure to detect firmware: java.util.concurrent.TimeoutException: Machine still busy after timeout expired, task rejected.
at org.openpnp.spi.base.AbstractMachine.execute(AbstractMachine.java:681)
at org.openpnp.spi.Machine.execute(Machine.java:292)
at org.openpnp.machine.reference.solutions.GcodeDriverSolutions.findIssues(GcodeDriverSolutions.java:185)
at org.openpnp.machine.reference.driver.GcodeDriver.findIssues(GcodeDriver.java:1775)
at org.openpnp.spi.base.AbstractMachine.findIssues(AbstractMachine.java:817)
at org.openpnp.machine.reference.ReferenceMachine.findIssues(ReferenceMachine.java:705)
at org.openpnp.model.Solutions.findIssues(Solutions.java:566)
at org.openpnp.gui.IssuesAndSolutionsPanel.lambda$findIssuesAndSolutions$0(IssuesAndSolutionsPanel.java:413)
at org.openpnp.util.UiUtils.messageBoxOnException(UiUtils.java:132)
at org.openpnp.gui.IssuesAndSolutionsPanel.findIssuesAndSolutions(IssuesAndSolutionsPanel.java:412)
at org.openpnp.gui.IssuesAndSolutionsPanel$5.actionPerformed(IssuesAndSolutionsPanel.java:443)
at javax.swing.AbstractButton.fireActionPerformed(Unknown Source)
at javax.swing.AbstractButton$Handler.actionPerformed(Unknown Source)
at javax.swing.DefaultButtonModel.fireActionPerformed(Unknown Source)
at javax.swing.DefaultButtonModel.setPressed(Unknown Source)
at javax.swing.plaf.basic.BasicButtonListener.mouseReleased(Unknown Source)
at java.awt.AWTEventMulticaster.mouseReleased(Unknown Source)
at java.awt.Component.processMouseEvent(Unknown Source)
at javax.swing.JComponent.processMouseEvent(Unknown Source)
at java.awt.Component.processEvent(Unknown Source)
at java.awt.Container.processEvent(Unknown Source)
at java.awt.Component.dispatchEventImpl(Unknown Source)
at java.awt.Container.dispatchEventImpl(Unknown Source)
at java.awt.Component.dispatchEvent(Unknown Source)
at java.awt.LightweightDispatcher.retargetMouseEvent(Unknown Source)
at java.awt.LightweightDispatcher.processMouseEvent(Unknown Source)
at java.awt.LightweightDispatcher.dispatchEvent(Unknown Source)
at java.awt.Container.dispatchEventImpl(Unknown Source)
at java.awt.Window.dispatchEventImpl(Unknown Source)
at java.awt.Component.dispatchEvent(Unknown Source)
at java.awt.EventQueue.dispatchEventImpl(Unknown Source)
at java.awt.EventQueue.access$500(Unknown Source)
at java.awt.EventQueue$3.run(Unknown Source)
at java.awt.EventQueue$3.run(Unknown Source)
at java.security.AccessController.doPrivileged(Native Method)
at java.security.ProtectionDomain$JavaSecurityAccessImpl.doIntersectionPrivilege(Unknown Source)
at java.security.ProtectionDomain$JavaSecurityAccessImpl.doIntersectionPrivilege(Unknown Source)
at java.awt.EventQueue$4.run(Unknown Source)
at java.awt.EventQueue$4.run(Unknown Source)
at java.security.AccessController.doPrivileged(Native Method)
...
2023-01-30 13:34:16.560 GcodeDriverSolutions WARNING: GcodeDriver failure to detect firmware: java.util.concurrent.TimeoutException: Machine still busy after timeout expired, task rejected.
at org.openpnp.spi.base.AbstractMachine.execute(AbstractMachine.java:681)
at org.openpnp.spi.Machine.execute(Machine.java:292)
at org.openpnp.machine.reference.solutions.GcodeDriverSolutions.findIssues(GcodeDriverSolutions.java:185)
at org.openpnp.machine.reference.driver.GcodeDriver.findIssues(GcodeDriver.java:1775)
at org.openpnp.spi.base.AbstractMachine.findIssues(AbstractMachine.java:817)
at org.openpnp.machine.reference.ReferenceMachine.findIssues(ReferenceMachine.java:705)
at org.openpnp.model.Solutions.findIssues(Solutions.java:566)
at org.openpnp.gui.IssuesAndSolutionsPanel.lambda$findIssuesAndSolutions$0(IssuesAndSolutionsPanel.java:413)
at org.openpnp.util.UiUtils.messageBoxOnException(UiUtils.java:132)
at org.openpnp.gui.IssuesAndSolutionsPanel.findIssuesAndSolutions(IssuesAndSolutionsPanel.java:412)
at org.openpnp.gui.IssuesAndSolutionsPanel$5.actionPerformed(IssuesAndSolutionsPanel.java:443)
at javax.swing.AbstractButton.fireActionPerformed(Unknown Source)
at javax.swing.AbstractButton$Handler.actionPerformed(Unknown Source)
at javax.swing.DefaultButtonModel.fireActionPerformed(Unknown Source)
at javax.swing.DefaultButtonModel.setPressed(Unknown Source)
at javax.swing.plaf.basic.BasicButtonListener.mouseReleased(Unknown Source)
at java.awt.AWTEventMulticaster.mouseReleased(Unknown Source)
at java.awt.Component.processMouseEvent(Unknown Source)
at javax.swing.JComponent.processMouseEvent(Unknown Source)
at java.awt.Component.processEvent(Unknown Source)
at java.awt.Container.processEvent(Unknown Source)
at java.awt.Component.dispatchEventImpl(Unknown Source)
at java.awt.Container.dispatchEventImpl(Unknown Source)
at java.awt.Component.dispatchEvent(Unknown Source)
at java.awt.LightweightDispatcher.retargetMouseEvent(Unknown Source)
at java.awt.LightweightDispatcher.processMouseEvent(Unknown Source)
at java.awt.LightweightDispatcher.dispatchEvent(Unknown Source)
at java.awt.Container.dispatchEventImpl(Unknown Source)
at java.awt.Window.dispatchEventImpl(Unknown Source)
at java.awt.Component.dispatchEvent(Unknown Source)
at java.awt.EventQueue.dispatchEventImpl(Unknown Source)
at java.awt.EventQueue.access$500(Unknown Source)
at java.awt.EventQueue$3.run(Unknown Source)
at java.awt.EventQueue$3.run(Unknown Source)
at java.security.AccessController.doPrivileged(Native Method)
at java.security.ProtectionDomain$JavaSecurityAccessImpl.doIntersectionPrivilege(Unknown Source)
at java.security.ProtectionDomain$JavaSecurityAccessImpl.doIntersectionPrivilege(Unknown Source)
at java.awt.EventQueue$4.run(Unknown Source)
at java.awt.EventQueue$4.run(Unknown Source)
at java.security.AccessController.doPrivileged(Native Method)
...
2023-01-30 13:34:49.885 AbstractMachine TRACE: Exception caught, executing pending motion: java.lang.Exception: serial://COM3 timeout waiting for response to ; Initialize acceleration
at org.openpnp.machine.reference.driver.GcodeDriver.waitForConfirmation(GcodeDriver.java:1132)
at org.openpnp.machine.reference.driver.GcodeDriver.sendCommand(GcodeDriver.java:1110)
at org.openpnp.machine.reference.driver.GcodeDriver.sendGcode(GcodeDriver.java:1076)
at org.openpnp.machine.reference.driver.GcodeDriver.home(GcodeDriver.java:514)
at org.openpnp.machine.reference.driver.AbstractMotionPlanner.home(AbstractMotionPlanner.java:99)
at org.openpnp.machine.reference.ReferenceMachine.home(ReferenceMachine.java:516)
at org.openpnp.machine.reference.solutions.KinematicSolutions$1.lambda$null$1(KinematicSolutions.java:97)
at org.openpnp.util.UiUtils.lambda$submitUiMachineTask$0(UiUtils.java:39)
at org.openpnp.spi.base.AbstractMachine$1.call(AbstractMachine.java:578)
at java.util.concurrent.FutureTask.run(Unknown Source)
at java.util.concurrent.ThreadPoolExecutor.runWorker(Unknown Source)
at java.util.concurrent.ThreadPoolExecutor$Worker.run(Unknown Source)
at java.lang.Thread.run(Unknown Source)
2023-01-30 13:34:49.889 AbstractMachine TRACE: Machine entering idle state.
2023-01-30 13:34:49.890 MessageBoxes DEBUG: Error: java.lang.Exception: serial://COM3 timeout waiting for response to ; Initialize acceleration
mark maker
Hi jbasia,
thanks for helping find the root causes.
Apparently, the acceleration is not set, the command sent is just an empty comment line:
2023-01-30 13:33:49.882 GcodeDriver DEBUG: [serial://COM3] >> ; Initialize acceleration, -1
On one hand, that should be allowed to happen and still
work.
On the other hand, I&S should already have prompted you to
choose the ModeratedConstantAcceleration method, and then
I don't see why the acceleration is not sent. Please send the machine.xml (best send it with each
post after significant config changes).
What is surprising is that Marlin does not seem to
"ok"-acknowledge empty (comment-only) lines. Unfortunately, the NIST
RS274NGC standard does not standardize how and when a
controller should respond. The "ok" response that seems to be the
consensus among open source controllers is purely a convention.
Still, I think Marlin is mistaken not to respond to these lines,
because waiting for the "ok" is a common way of performing serial
flow control (a.k.a. "confirmation flow control").
Side remark: There are ways for OpenPnP to universally
suppress empty lines (driver options G-code compression + comments
removal), and/or to use alternatives to confirmation flow
control, but these options are only offered in the Advanced
milestone and I'd like to keep it that way. So please do not try these now 😠, I'd like
to find a way that is universally useful without straying into
"advanced" stuff.
Instead, please try the following. Manually change the proposed HOME_COMMAND command from this:
{Acceleration:M204 S%.2f} ; Initialize acceleration
G28 ; Home all axes
To this, i.e., move the closing curly bracket to the end:
{Acceleration:M204 S%.2f ; Initialize acceleration}G28 ; Home all axes
This should suppress the line entirely. If this proves successful, I will then fix it in Issues & Solutions, so even quirky Marlin is happy. 😎
Ideally we could bring Marlin to a similar good level as Smoothie
and Duet in terms of OpenPnP and Issues & Solutions setup
support. Thanks for keeping the ball
rolling.
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/325c4744-d6a2-4711-bb21-285dd7dd3a6cn%40googlegroups.com.
jbasia
Ideally we could bring Marlin to a similar good level as Smoothie and Duet in terms of OpenPnP and Issues & Solutions setup support. Thanks for keeping the ball rolling.
mark maker
> At this point I wouldn't really mind to ditch Marlin.
Please hang in there.
It would really be valuable if we could make this work, as the
Lumen seems to attract many users, and Marlin is a good open
source firmware, anyways.
And the most relevant stuff, namely handling rotational axes A B
C correctly, already seems to work in that Marlin version (they do
not use them as "extruders"), so I do not think that a newer
firmware version seems to matter much for us.
Maybe they're reading this ... ideally, the Lumen guys would send
me a free board for extended OpenPnP integration. Like the Duet
guys also kindly did. 😁
It could even be a partially damaged/unfinished board, I only want to talk to the firmware, and merely operate it on my "OpenPnP controller test bed" with one stepper attached, like I do with the others:
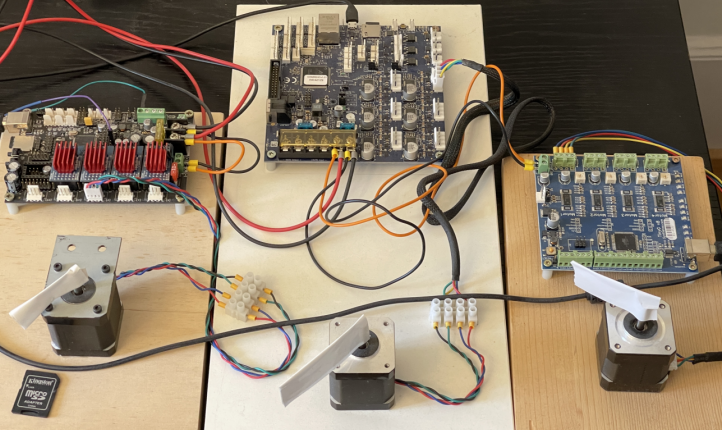
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/2e6d8574-5ca1-4d2f-93ae-10420badd8dbn%40googlegroups.com.
jbasia
jbasia
2023-01-31 12:13:15.402 GcodeDriver DEBUG: [serial://ttyACM0] >> G21 ; Set millimeters mode, 5000
2023-01-31 12:13:15.404 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << ok
2023-01-31 12:13:15.405 GcodeDriver TRACE: [serial://ttyACM0] confirmed G21 ; Set millimeters mode
2023-01-31 12:13:15.406 GcodeDriver DEBUG: [serial://ttyACM0] >> G90 ; Set absolute positioning mode, 5000
2023-01-31 12:13:15.408 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << ok
2023-01-31 12:13:15.409 GcodeDriver TRACE: [serial://ttyACM0] confirmed G90 ; Set absolute positioning mode
2023-01-31 12:13:15.416 AbstractMachine TRACE: Machine entering idle state.
2023-01-31 12:13:28.913 ReferenceMachine DEBUG: homing machine
2023-01-31 12:13:28.918 GcodeDriver DEBUG: [serial://ttyACM0] >> M204 S666.67, -1
2023-01-31 12:13:28.920 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << ok
2023-01-31 12:13:28.921 GcodeDriver TRACE: [serial://ttyACM0] confirmed M204 S666.67
2023-01-31 12:13:28.921 GcodeDriver DEBUG: [serial://ttyACM0] >> G28, -1
2023-01-31 12:13:30.922 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << echo:busy: processing
2023-01-31 12:13:32.443 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << echo:Homing Failed
2023-01-31 12:13:32.445 GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] << Error:Printer halted. kill() called!
2023-01-31 12:14:17.015 ReferenceMachine DEBUG: setEnabled(false)
2023-01-31 12:14:17.019 ReferenceMachine INFO: setHomed(false)
2023-01-31 12:14:17.023 GcodeDriver$ReaderThread TRACE: Read error while disconnecting (normal)
2023-01-31 12:14:17.023 MessageBoxes DEBUG: Error: java.lang.Exception: Error actuating LIGHT_BOTTOM
2023-01-31 12:14:17.092 MessageBoxes DEBUG: Error: java.lang.Exception: Error actuating LIGHT_TOP
2023-01-31 12:14:28.922 AbstractMachine TRACE: Exception caught, executing pending motion: java.lang.Exception: serial://ttyACM0 timeout waiting for response to G28
at org.openpnp.machine.reference.driver.GcodeDriver.waitForConfirmation(GcodeDriver.java:1130)
at org.openpnp.machine.reference.driver.GcodeDriver.sendCommand(GcodeDriver.java:1108)
at org.openpnp.machine.reference.driver.GcodeDriver.sendGcode(GcodeDriver.java:1074)
at org.openpnp.machine.reference.driver.GcodeDriver.home(GcodeDriver.java:514)
at org.openpnp.machine.reference.driver.AbstractMotionPlanner.home(AbstractMotionPlanner.java:99)
at org.openpnp.machine.reference.ReferenceMachine.home(ReferenceMachine.java:516)
at org.openpnp.util.UiUtils.lambda$submitUiMachineTask$0(UiUtils.java:39)
at org.openpnp.spi.base.AbstractMachine$1.call(AbstractMachine.java:578)
at java.base/java.util.concurrent.ThreadPoolExecutor.runWorker(ThreadPoolExecutor.java:1128)
at java.base/java.util.concurrent.ThreadPoolExecutor$Worker.run(ThreadPoolExecutor.java:628)
at java.base/java.lang.Thread.run(Thread.java:829)
2023-01-31 12:14:28.927 AbstractMachine TRACE: Machine entering idle state.
2023-01-31 12:14:28.927 MessageBoxes DEBUG: Error: java.lang.Exception: serial://ttyACM0 timeout waiting for response to G28
mark maker
As you see in the log, that's a Marlin config problem, not
an OpenPnP problem:
2023-01-31 12:13:32.443
GcodeDriver$ReaderThread TRACE: [serial://ttyACM0] <<
echo:Homing Failed
2023-01-31 12:13:32.445 GcodeDriver$ReaderThread TRACE:
[serial://ttyACM0] << Error:Printer
halted. kill() called!
> What's new is that OpenPnP hangs and needs a kill, usually after homing.
Well, I don't think it hangs per se, but OpenPnP has an extra
long timeout for homing (60s), because this can take very long on
certain machines.
In the GcodeDriver, you can set an COMMAND_ERROR_REGEX
that recognizes the "halted", then OpenPnP
would immediately react to the error.
Issues & Solutions does not currently suggest the firmware
specific COMMAND_ERROR_REGEX
patterns (yet).
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/ecc34e2d-e362-4a15-9ab1-358fa6e2322dn%40googlegroups.com.
jbasia
As you see in the log, that's a Marlin config problem, not an OpenPnP problem:
mark maker
> One question: Can I move the Linux XML to Windows? Or better start again?
You can move it. Obviously the USB devices and Serial ports need
to be reassigned.
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/21103158-e1a3-4bd7-b592-0af3abb82d62n%40googlegroups.com.

Fabian Kropp
On the other hand, I&S should already have prompted you to choose the ModeratedConstantAcceleration method, and then I don't see why the acceleration is not sent. Please send the machine.xml (best send it with each post after significant config changes).
mark maker
It depends on the Milestone you're in. I was specifically referring to jbasia's config.
Anyways the workaround is now clear (quoting myself):
... please try the following. Manually change the proposed HOME_COMMAND command from this:
{Acceleration:M204 S%.2f} ; Initialize acceleration G28 ; Home all axesTo this, i.e., move the closing curly bracket to the end:
{Acceleration:M204 S%.2f ; Initialize acceleration} G28 ; Home all axesThis should suppress the line entirely. If this proves successful, I will then fix it in Issues & Solutions, so even quirky Marlin is happy. 😎
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/154ddf70-f12e-4a93-ab4e-727284f23262n%40googlegroups.com.
mark maker
Hi,
If you download the new test version of OpenPnP, this
should now be correctly suggested by Issues & Solutions, i.e.
the Marlin quirk is worked around.
- Issues & Solutions should now propose
HOMING_COMMANDandMOVE_TO_COMMANDwhere the acceleration command line is not sent as long as ToolpathFeedrate is set.
- As soon as you advance to the Kinematics milestone,
Issues & Solutions should propose ModeratedConstantAcceleration.
From then on the acceleration is controlled by OpenPnP and the
corresponding acceleration G-code lines (M204)
should be sent by OpenPnP.
Background:
https://github.com/openpnp/openpnp/pull/1517
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/b3d68e11-45b3-b60d-61e2-c78697954a61%40makr.zone.
jbasia
Hi,
If you download the new test version of OpenPnP, this should now be correctly suggested by Issues & Solutions, i.e. the Marlin quirk is worked around.
mark maker
> I found another mild annoyance that I noticed as a frequent from-zero-starter: the axis are not getting, or losing the driver setting during setup. After fixing it they stay.
Just to be sure: you are using Issues & Solutions to replace the driver, right?

I just did that myself and no driver assignments were lost,
before and after restarting OpenPnP.
I also double.checked the source code, the axes and actuators are
all rewired to the new driver:
Replacing the driver is the only thing that comes to mind when
losing the driver link. But maybe I'm missing something?
Can you be more specific when and where
this happens?
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/43525fdd-848d-4a52-ba7e-6bc690bf28b7n%40googlegroups.com.
jbasia
Can you be more specific when and where this happens?
mark maker
> Same can happen to the driver letters. It asked me to agree to name X, X.(and Y Z) And later I have to do that again manually. To me this is not important, takes a Second to enter it. To me this is not important...
But to me it is important. I want this to be rock solid 🙁
This is really strange. I did this a hundred times myself, I
accompanied many users, and (to my knowledge) this stuff works.
Are you aware of the unfortunate OpenPnP "forgot to press Apply"
pitfall?
Are you aware that Issues & Solutions does UNDO a change when you Reopen or Dismiss a solution?
Are you sure you never did anything along the lines of that
"counterproductive" video you linked earlier? Like manually
deleting the driver, or axes and creating new ones manually?
Do you ever manually edit the machine.xml?
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/820fc1bd-ee58-4e76-a84f-7acb7b8d1060n%40googlegroups.com.
jbasia
> Same can happen to the driver letters. It asked me to agree to name X, X.(and Y Z) And later I have to do that again manually. To me this is not important, takes a Second to enter it. To me this is not important...
But to me it is important. I want this to be rock solid 🙁