ODrive: High performance servomotor controller

Oskar Weigl
Cheers!


Jason von Nieda
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3b288331-1935-4837-8d82-4f212951338e%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

Graeme Bridge
Oskar Weigl
Oskar Weigl

matt
Can you send a link to the motors you are using? Also as it stands, is
it using an encoder for positioning - can you get good repeatability out
of it? Say 0.05mm precision?
Matt
On 2016-05-11 21:35, Oskar Weigl wrote:
> Thanks!
>
> I have been focusing on doing the control and motion profiles, so I
> haven't done any interfacing yet. The demo is using a hard-coded array
> of target locations to reach; at the moment the software stack
> supports straight line movements from point to point.
>
> It currently does not do much interfacing, but the v3 board has both
> USB Serial and CAN on it for interfacing. The idea with USB Serial is
> to be able to accept G-Code, however this is not implemented yet. If
> someone here is interested in porting some G-Code parsing to this
> board, I'll happily send them a board to test on.
>
> I should probably mention that the youtube-to-gif converter doesn't
> really get the framerate correct, so the gif is a bit fast. You should
> the gif, as it can handle more than 10x the power used in that demo.
>
> Cheers,
> Oskar
>
> On Wednesday, May 11, 2016 at 9:26:34 PM UTC+2, Jason von Nieda wrote:
>
>> *Picks jaw up off floor*
>>
>> Wow! That is an impressive demo!!
>>
>> Can you tell me a little about the software stack seen in the demo
>> gif? Is all the motion being generated by your Odrive board? Sending
>> Gcode to it?
>>
>> I'm pretty amazed that the machine doesn't throw itself off the
>> table and run across the floor with those accelerations.
>>
>> Nice work Oskar!
>>
>> Jason
>>
>> On Wed, May 11, 2016 at 12:05 PM Oskar Weigl <madc...@gmail.com>
>> wrote:
>>
>>> Hey,
>>>
>>> I thought you guys might be interested in my project called Odrive
>>> would be useful for building high speed pick and place
>>> Cheers!
>>>
>>> --
>>> You received this message because you are subscribed to the
>>> Google Groups "OpenPnP" group.
>>> To unsubscribe from this group and stop receiving emails from it,
>>> send an email to openpnp+u...@googlegroups.com.
>>> To post to this group, send email to ope...@googlegroups.com.
>>> To view this discussion on the web visit
>>>
>>
> https://groups.google.com/d/msgid/openpnp/3b288331-1935-4837-8d82-4f212951338e%40googlegroups.com
>>> For more options, visit https://groups.google.com/d/optout [4].
> --
> You received this message because you are subscribed to the Google
> Groups "OpenPnP" group.
> To unsubscribe from this group and stop receiving emails from it,
> send an email to openpnp+u...@googlegroups.com.
> To post to this group, send email to ope...@googlegroups.com.
> To view this discussion on the web visit
> [5].
> For more options, visit https://groups.google.com/d/optout [4].
>
>
> Links:
> ------
> [1]
> https://hackaday.io/project/11583-odrive-high-performance-motor-control
> [2]
> https://camo.githubusercontent.com/beebe492cced4ada2046e786a958af7caaec998a/68747470733a2f2f6a2e676966732e636f6d2f6c5978376b362e676966
> [3]
> https://groups.google.com/d/msgid/openpnp/3b288331-1935-4837-8d82-4f212951338e%40googlegroups.com?utm_medium=email&utm_source=footer
> [4] https://groups.google.com/d/optout
> [5]
> https://groups.google.com/d/msgid/openpnp/c6607b96-4a4e-4933-b125-77575818daf1%40googlegroups.com?utm_medium=email&utm_source=footer
Oskar Weigl

Glen English
Glen English

Mark Harris
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9d6e62a6-25fd-4f7c-8565-0cee4ac822af%40googlegroups.com.

Lisandro B
Joke aside, I can't wait to get a couple of boards, I'll following this project very closely. Great job!

Paul Jones
Yeah!! I’ve been waiting for this sort of thing for a while!! I thought about developing one myself, but that level of performance was too far out of my level of skillset vs time ratio.
Great Job!
Paul.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BQw0jzPOqn%3Dd1yLW83D%2B%3DU5vub-gtSzy1xzwug4%3DK2rpHz_gA%40mail.gmail.com.
Glen English

Paul Kelly
I’ll add my applause. And a commitment to purchase a heap too.
Do you need help manufacturing? We have some spare capacity at the moment I’d be happy to donate...
PK
Paul Kelly | Design Engineer
CASWA Pty Ltd
2/33 Horus Bend, Bibra Lake WA 6163
M 0402 177280 | P +61 8 9277 0900 | F +61 8 9467 0550 | E te...@caswa.com
Check out our new explainer video for AccessPack..
From: ope...@googlegroups.com [mailto:ope...@googlegroups.com] On Behalf Of Oskar Weigl
Sent: Thursday, 12 May 2016 4:35 AM
To: OpenPnP
Subject: Re: [OpenPnP] ODrive: High performance servomotor controller
Thanks!
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/c6607b96-4a4e-4933-b125-77575818daf1%40googlegroups.com.
Oskar Weigl
Oskar.
Oskar Weigl
I will announce when the project is in alpha testing stage, and when it is in beta testing stage. I will try to facilitate getting boards out to people by some method at those times.
Cheers!
Oskar Weigl
Oskar Weigl
Graeme Bridge
Oskar Weigl
- Use Odrive for the main axes, and use a stepper for the Z axis.
- Use 2 Odrives. Gives you a 4th auxiliary axis for whatever you want to do with it.
- We redesign Odrive v4 to have 3 axes.

Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/d936cef7-a568-4f65-90fe-639d9b37d60f%40googlegroups.com.
Lisandro B
Mark Harris
Maybe you can evaluate the possibility of Daisy chain the boards, so one USB can control many of them
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/9a450102-47f2-4bd5-8f5c-f0937b799e20%40googlegroups.com.
Oskar Weigl
- The transfer from the motor to the encoder still has to be somewhat stiff. The torque production efficiency would decrease like cos(delta_theta/pp), where pp are the number of pole pairs in the motor. To not drop below 90% efficiency, on a 7 pole pair motor you would have to ensure that during full torque, the mechanical error is no more than about 4 degrees.
- There are now extra mechanical springlike dynamics in the feedback path, which may change the stability of the controller. I think this can be adequately modeled though.
Oskar Weigl
Oskar Weigl

FredG
Hello Oskar,

Oskar Weigl
Hey Fred,
I have considered that and I'm happy to share them in this way. I want to make sure that the board works with the very basics first.
Cheers!
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/1d605be0-0bc0-4f99-9eec-feb63c837365%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.

code shell
在 2016年5月12日星期四 UTC+8上午3:05:17,Oskar Weigl写道:
Oskar Weigl
Cheers!
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8b82d190-56e4-4d11-aadf-b476889ca50f%40googlegroups.com.
Oskar Weigl
Oskar Weigl
- ODrive v3.1
- USB Programmer
- A set of the optional large gauge wire screw terminals
- A set of pin headers
- Some nylon standoffs

Anthony Webb
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+unsubscribe@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3f36efa1-54d4-4119-97ce-033db3309d30%40googlegroups.com.
Oskar Weigl
How many motors will the controller handle (looks like maybe 2)? Are there motors that you recommend that will pair nicely with this setup? I'd generally be interested in knowing a little more where the project is at today, what the roadmap looks like, and maybe an overview of how to interface (ie do you just use standard step/dir signals?)On Thu, Dec 15, 2016 at 10:17 AM, Oskar Weigl <madc...@gmail.com> wrote:
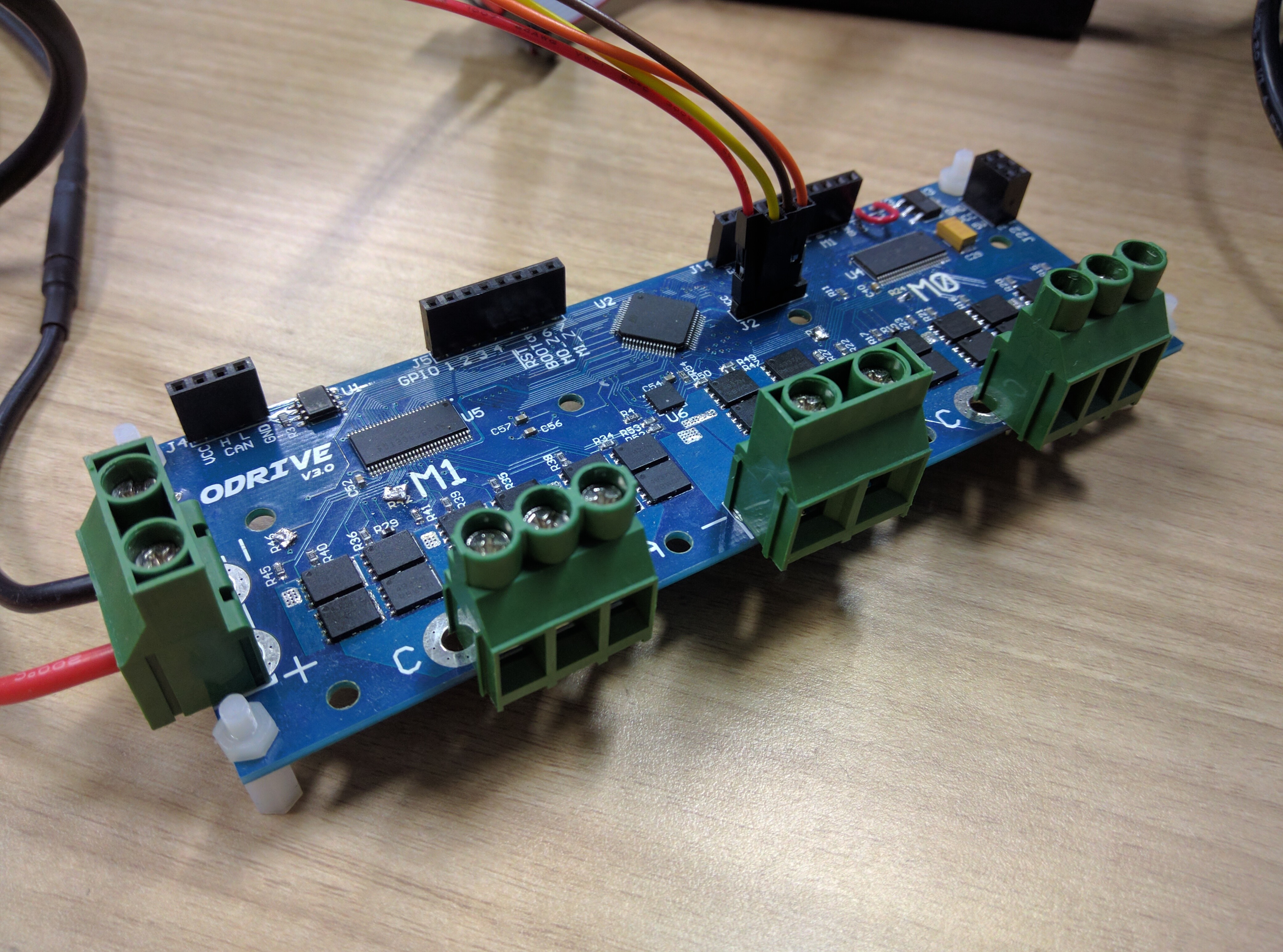
The time has finally come for the manufacturing run of ODrive v3.1. They are now on the way, and should arrive early to mid January.At this stage, around 20 board kits are going out the people who signed up to the "Inital development" phase. They have not been all allocated yet, you can signup here.Since the boars are going out to just a small group of early developers, I will have the time to personally get you up to speed with the codebase and help to get going with the hardware. Then, together, we can prepare some stuff that is a bit more stable and a bit more documented for when the alpha testing begins.The cost for me to get this small batch of boards manufactured was $96 per board, so that is the amount I need to ask for a kit, plus shipping.The kit involves basically everything seen in the above picture, and consists of:
- ODrive v3.1
- USB Programmer
- A set of the optional large gauge wire screw terminals
- A set of pin headers
- Some nylon standoffs
I hope that ODrive will be able to help you make an awesome robotics project, thank you so much for your contribution to helping people have access to open robotics hardware and software.On Sunday, July 3, 2016 at 8:55:44 AM UTC+9, Oskar Weigl wrote:Hey everyone,There is now an update about board availability and the roadmap for the ODrive features on the project page.If you are interested in getting an ODrive board, you should check it out.Cheers!--You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3f36efa1-54d4-4119-97ce-033db3309d30%40googlegroups.com.
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CALsNZy0yczaDBTaHt_xY2XsnG2G94_OOvm0DrDhJNQ8QAMtA4Q%40mail.gmail.com.

Lamont Cranston
On Dec 15, 2016, at 11:26 AM, Oskar Weigl <oskar...@gmail.com> wrote:
> The motors I recommend are generally low kv motors, for higher torque and lower speed. But it really depends on your application.
I'm interested in the answer to this question too. Since you posted to the OpenPNP list you must think there's a motor out there that, along with ODrive, would be useful for pick-and-place applications. Can you please give an example?
I heard about ODrive a while back, but you wrote this:
"You should not use this drive in your project if: you need high torque, but don't care
about speed, and you don't want to use any gearing. If this is the case, steppers are
probably better for your project"
https://hackaday.io/project/11583-odrive-high-performance-motor-control
I guess I must have misunderstood.
Generally for pick-and-place you don't want gearing if you can avoid it. More gearing means more slack ("backlash") and positional accuracy trumps all other concerns for PnP.
Although "don't care about speed" isn't true for PnP, it doesn't need the sort of velocities you see in RC/drone drivetrains. And the sort of crazy (impressive!) velocities+accelerations shown in your demo videos probably aren't useful for pick and place machines except at the very high end -- most of us don't have vacuum pickup systems that can reliably maintain part position on the nozzle at those velocities+accelerations.
I'd be happy to be wrong about all this.
PS, high-current DC power supplies (like 200A @ 12V) are actually pretty cheap, check out what the bitcoin miners are doing with surplus server PSUs...
Oskar Weigl
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/A820C5BF-1C3A-4D87-85D9-1FD1A81A4680%40gmail.com.
Lamont Cranston
On Dec 18, 2016, at 5:56 AM, Oskar Weigl <oskar...@gmail.com> wrote:
> So the main benefit of brushless servomotors over steppers is power. However, there are also some other benefits, like closed-loop positioning, and silent operation. Of course, you can do closed-loop positioning with steppers too, like with the Mechaduino.
But "real" BLDCs (as opposed to steppers, which are technically also BLDCs) have only a few poles (as few as three) whereas commodity steppers have at least 200 poles. So in order to get nice smooth sinusoidal commutation on a stepper your motor driver's PWM chopper and the DAC that maps out the current waveform both need to run 60x faster.
So I would say that power is not the only benefit of BLDCs over steppers.
Having completely rewritten the mechaduino code at this point I can say that this concern is not purely theoretical, although a different choice of components than the mechaduino made might help. But being able to use motors with fewer poles seems to me the easier route.
Assuming the firmware were adequately developed, can you comment on any disadvantages of an ODrive-driven BLDC drivetrain compared to a Smart Stepper (Trampas' helpful term for the class of closed-loop steppers that encompasses Mechaduino, Nano Zero Stepper, and others) for PnP applications? Clearly the advantages are more power and slower switching -- what are the disadvantages?
> but I simply mean the diameter of the pulley, or the pitch of the lead screw, etc.
> I don't know much about PnP vacuum systems, I kind of assumed that the weight of a small surface mount component is very small compared to the suction force,
> Maybe there is room for innovating on low cost, but higher performing vacuum systems?
> Oh and thanks about the heads up about high power PSUs.

Red Davies
MGN12-style of rail. I guess one could use that as feedback instead
of the rotational encoder with some firmware tweaks?
> You received this message because you are subscribed to the Google Groups "OpenPnP" group.
> To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.

oliver jackson
Lisandro B
Oskar Weigl
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/94C9F1A1-EE1F-45E2-9AFA-4F3316DDC728%40gmail.com.
Oskar Weigl
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAFGw4%3DB0hoZNVrZzehPYnZuB6sM6-uH8JREM57kMj8oBt%2BLgWA%40mail.gmail.com.

Michael Anton

Juha Kuusama
Oskar Weigl
Hi,The speed is indeed very, very impressive. For a pick and place, accuracy is also important. In principle, how accurate positioning ODrive can achieve, if we assume no error from the encoder? Also, we can get position data from rotation encoder by counting revolutions, right?
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/755575b9-c41d-4071-9a13-41ac8dec62e9%40googlegroups.com.

Trampas Stern
Lisandro B
Lamont Cranston
On Dec 19, 2016, at 7:14 AM, Red Davies <noid...@gmail.com> wrote:
> So, I've been working on a 'glue-on' magnetic linear encoder for the
> MGN12-style of rail.
I've been playing with the AMS magnetic linear encoders but they say you should not stick them to ferrous metals and many of the linear rails use ferrous stainless steel.
Oskar Weigl
On my CNC I have linear rails and c7 ball screws, just tell me which motor can replace my currently 3nm stepper and let's start testing :)
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/105351f6-e5dc-4848-bd86-200b59621bd1%40googlegroups.com.
Oskar Weigl
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3f36efa1-54d4-4119-97ce-033db3309d30%40googlegroups.com.

Oz-Ron
Oskar,
I am impressed! This manufacturing technique is very clever.
Using the SR-71 principle, if the parts move fast enough, the leads can then reflow the solder paste directly upon placement thereby alleviating the need to run the PCB through an oven! Pick, place & solder all in one……. J
Happy new year to all, and special thanks to Jason for his incredible dedication & swift responses.
OpenPnP will live long and prosper!
Cheers,
Ron

Oskar Weigl
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f7e7ad42-b288-4a90-b299-ac9f30a52f1f%40googlegroups.com.
Mark Harris
Haha in this context, at first I thought SR-71 was some sort of infrared lamp soldering standard. But as soon as I tried to Google it, I see that you are a funny guy xD.I think the main problem of this technique is the noise of going through the sound barrier so frequently (;Cheers,
Oskar
On Mon, 26 Dec 2016, 03:35 Oz-Ron, <ronedw...@gmail.com> wrote:
--Oskar,
I am impressed! This manufacturing technique is very clever.
Using the SR-71 principle, if the parts move fast enough, the leads can then reflow the solder paste directly upon placement thereby alleviating the need to run the PCB through an oven! Pick, place & solder all in one……. J
Happy new year to all, and special thanks to Jason for his incredible dedication & swift responses.
OpenPnP will live long and prosper!
Cheers,
Ron
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/L44yY_LGNls/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+unsubscribe@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f7e7ad42-b288-4a90-b299-ac9f30a52f1f%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+unsubscribe@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2Brx3hLk730tnU5xhL6T%3DUYsPMOmtypX4TW-wgxyaR2uAp%3DGvA%40mail.gmail.com.