General config questions "need advice"

D.Mouradov
Hello, I am 2 years behind the project. The last time I turned on my PnP machine was in 2019. Since then, a lot has changed in OpenPnP.
Today reinstalled Linux mint and installed OpenPnP 2.0 and started setting up OpenPnP
what is done
1. Configured all axes to move in the correct direction and homing
2. Lights, cameras, Pumps, Valves all working
There are three points that I cannot understand. if it's not difficult, give advice in which direction to look.
1. After homing, Z1 remains in the lower position
My Config Shared Z

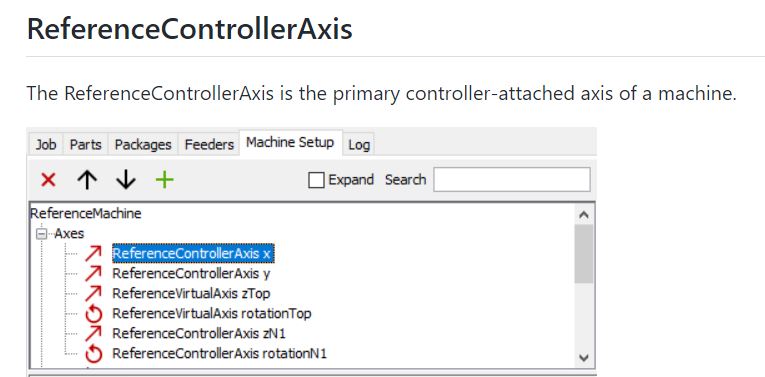
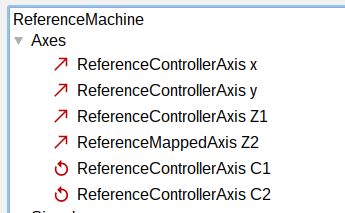
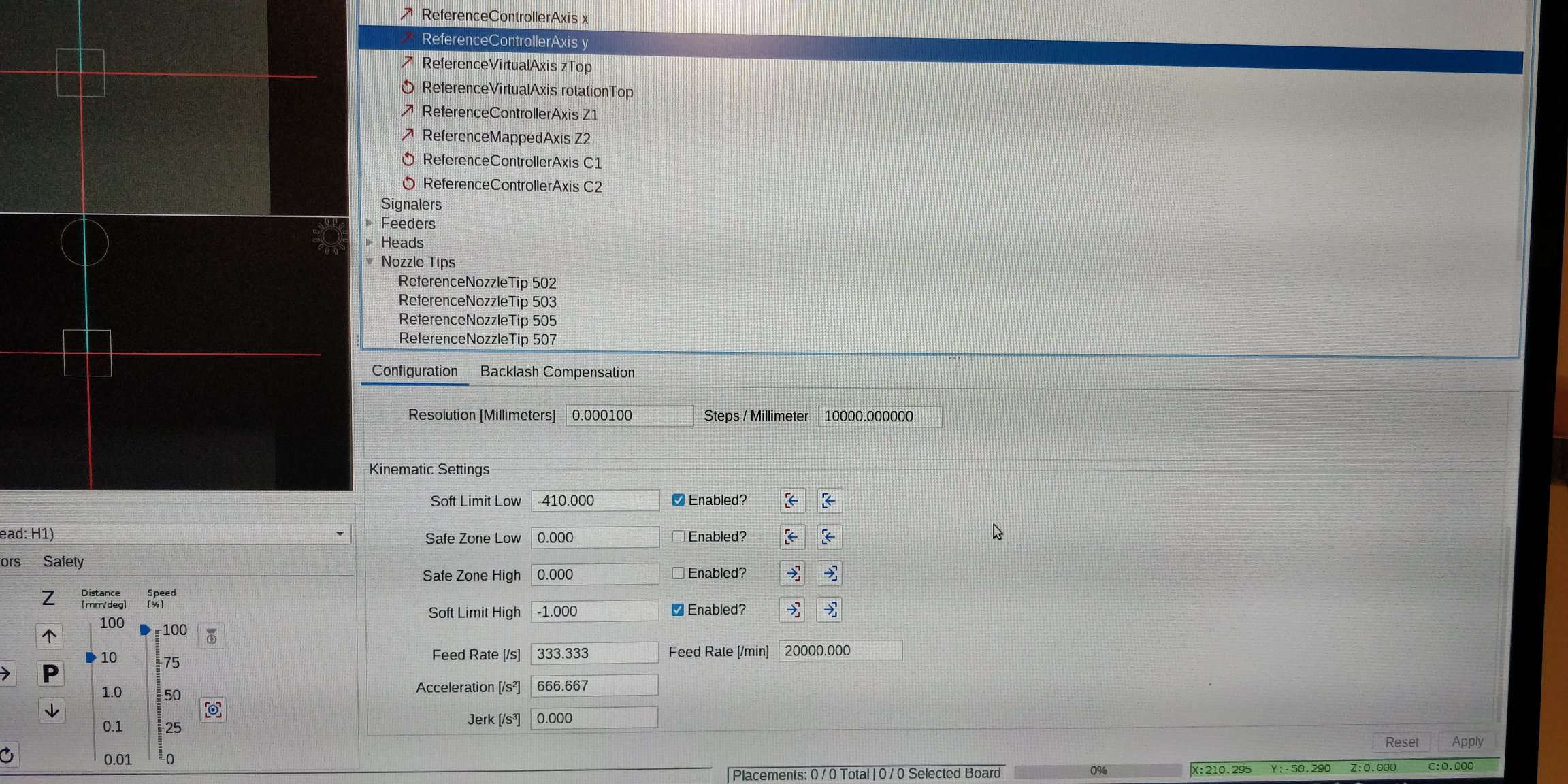
2. In my axes list, I don't have VirtualAxis zTop and rotationTop, this is the way it should be?
Wiki Example
My config
3. jog control is very slow
I know all these are simple questions, I know I shouldn't ask such questions.
but did not find an answer in the documentation.
if you tell me which way to look I will be very grateful.
Thanks

mark maker
Hi D,
re 1: Need more info, machine.xml and log at
TRACE level.
re 2: Virtual Axes should have been automatically created, if you migrate from a version from before Advanced Motion Control. So if you don't have them, you must likely have deleted them manually (you're not the first ;-). You can easily recreate them and assign them to the camera.
https://github.com/openpnp/openpnp/wiki/Machine-Axes#referencevirtualaxis
re 3: check the Driver feed-rate limit. Delete it (set to 0).
NOTE: I hope you are using Issues
& Solutions extensively. It should tell you the solution for 3.
https://github.com/openpnp/openpnp/wiki/Issues-and-Solutions
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/53bd5442-2179-46bc-925f-2a1c0872af40n%40googlegroups.com.
D.Mouradov
mark maker
> Lens calibration must be done before or after?
It does not matter, as the early calibration steps only use the
center point of the camera.
However...
Tony Luken has created a great automatic camera and lens
calibration, that is now integrated in the OpenPnP testing
version:
https://openpnp.org/test-downloads/
He has not yet had time to announce it, I guess... So please
consider the following just a sneak preview. He will have to make
it "official" and get the well-earned praise too 😉 !!
You can use the Advanced Camera Calibration directly from
the camera Wizard, but I recommend using it from Issues &
Solutions, like the other calibrations. Issues &
Solutions will make sure it is done in the right order, and
it will make it more automatic, based on the knowledge from
previous calibration steps:
https://github.com/openpnp/openpnp/wiki/Calibration-Solutions#advanced-camera-calibration
Tony Luken wrote this Wiki too:
https://github.com/openpnp/openpnp/wiki/Advanced-Camera-Calibration
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/94674b36-0ce3-4682-9395-adac1ed989edn%40googlegroups.com.
D.Mouradov
D.Mouradov
mark maker
Re 1:
Well, usually the Z is homed first, in order to lift the nozzles
out of harms way. It seems your machine does it last, and it seems
it does not home to the nozzle balance point.
What switches do you have and what controller do you use?
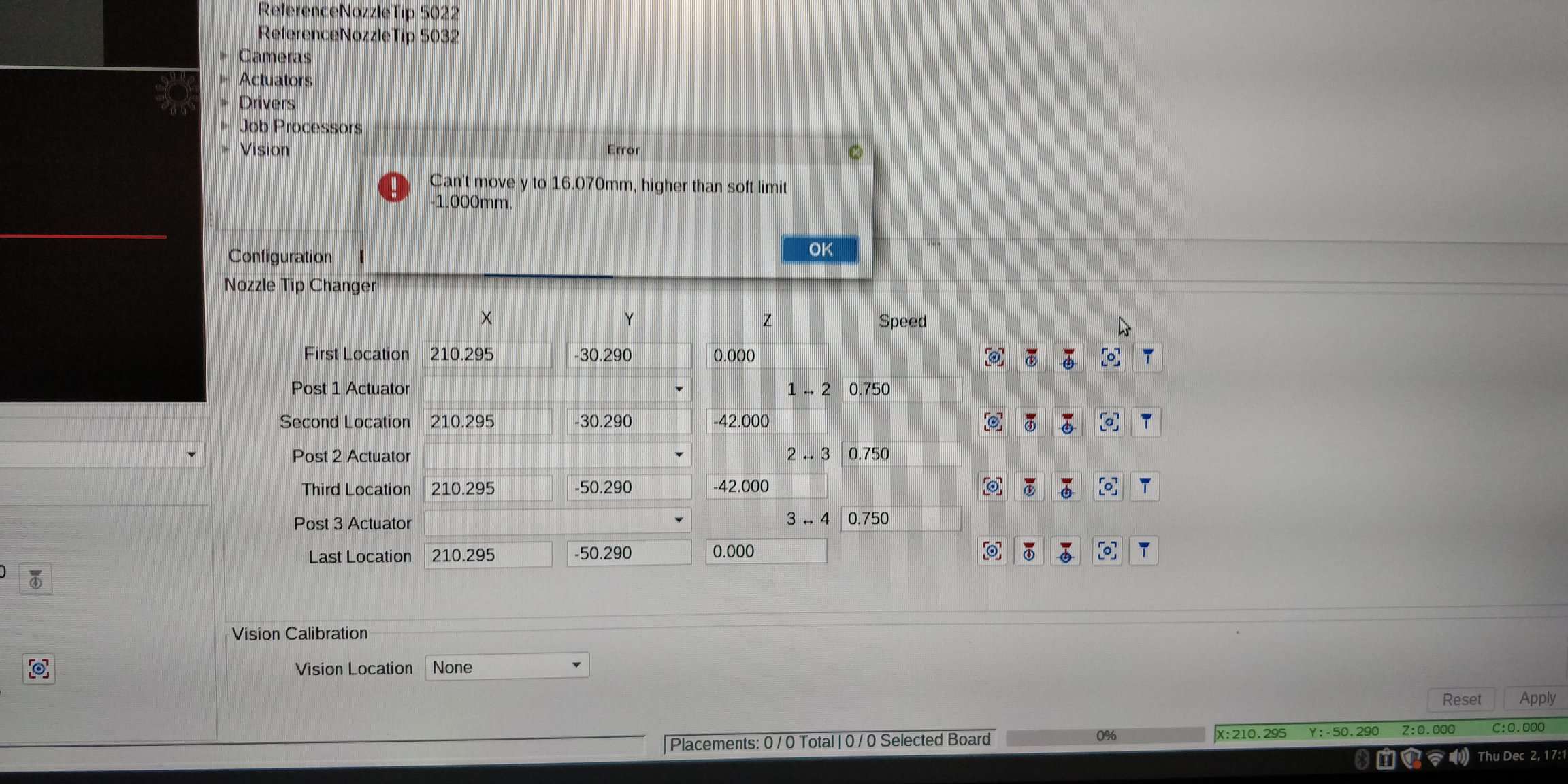
Re 2:
The test move is done with whatever tool you have selected in the Machine Controls. Each such tool has head offsets (typically the distance from the camera), that are subtracted from the coordinates. So if your left nozzle is selected, it would go beyond the soft limit.
It seems you have the Y axis all in the negative, because you
home to max (your homing switch is at the rear end). Are you sure
you cannot set a positive homing coordinate on your controller, so
that your Y coordinates stay in the positive?
_Mark
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/99369379-2f56-4784-836c-a474b56d949bn%40googlegroups.com.
D.Mouradov
mark maker
Hi D.
There are several things you can do.
First your HOME_COMMAND can contain additional moves. So for instance you can do something like this:
G28 ; Home machine the machine, will home Z to gamma_min = -27mm G0 Z0 ; Balance nozzles at Z0
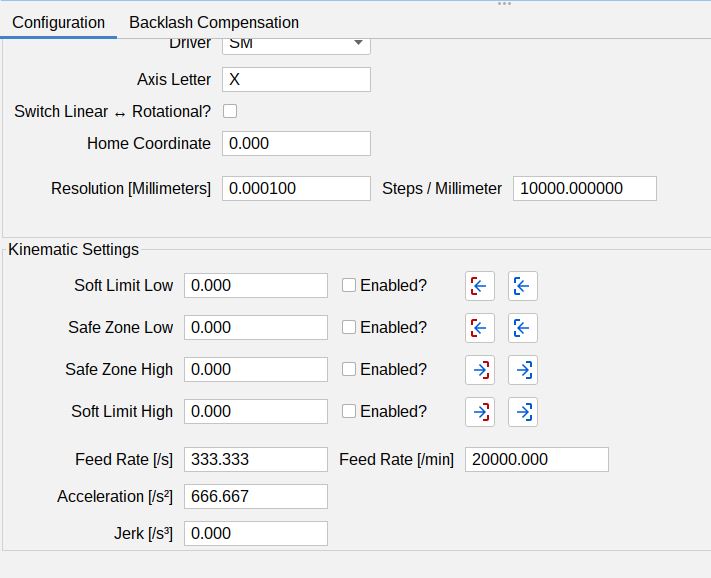
Then, after the HOME_COMMAND is completed, OpenPnP needs to know
the current machine position. This is done by entering the right Home
Coordinate on the axes. So now you need to enter 0 on the Z
axis (and the right after-homing position on all the other axes):
https://github.com/openpnp/openpnp/wiki/Machine-Axes#referencecontrolleraxis
That is the manual way.
If you proceed with Issues & Solution all the way to
the Advanced milestone, you can let Issues &
Solutions convert the GcodeDriver to the GcodeAsyncDriver.
https://github.com/openpnp/openpnp/wiki/GcodeAsyncDriver#for-existing-gcodedrivers
Then you can enable Location Confirmation, and disable
Confirmation Flow Control, for faster asynchronous
operation. As a side effect, this will always update the true
position of the machine into OpenPnP, so the homing coordinates on
axes don't actually matter, and any future changes in your homing
will automatically be corrected:
https://github.com/openpnp/openpnp/wiki/GcodeAsyncDriver#advanced-settings
_Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/06a2783f-ebfb-4478-95e1-19fbd464efa0n%40googlegroups.com.