Head thread (PNP head design)

Peter Betz




Anthony Webb
Sent from my iPhone
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/770ffe38-b033-42cb-aa62-cbd3172c44a3%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Peter Betz
Peter Betz
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/1C705B8E-1E8B-4BF9-A6E1-31FE6EC6ADA6%40gmail.com.
Anthony Webb
Sent from my iPhone
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/37F8526C-5F44-4EE0-B230-B6558E85D9DD%40gmail.com.
Anthony Webb
Sent from my iPhone
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/37F8526C-5F44-4EE0-B230-B6558E85D9DD%40gmail.com.

DAniel Dumitru
For example using a stepper driver that has stall detection could be implemented very easy a control for component height
Br,
Daniel
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/770ffe38-b033-42cb-aa62-cbd3172c44a3%40googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
betzt...@gmail.com
Anthony Webb
Sent from my iPhone
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/56C1579B.30200%40gmail.com.
Anthony Webb
Sent from my iPhone
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/EA01ED590CFA456795968E1B669D41A6%40BETZtechnik.

Cri S
It uses nema8 motors.
Peter Betz
Sure, go ahead and share them, it would be nice to see other ideas.
On that note, I think I am going to go for the belt design, it seems better for a lot of reasons (to me anyway).
I would really like to do a stepper and belt for each nozzle, but I see that the options for 6 axis motion controllers are limited. I will give this more thought. The advantage is that the rails could be half the length and the other head doesn't have to move unless needed......
Stand by for some models.
Peter.
Cri S
Cri S
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/699fa763-5452-4208-8548-a8ddff8b6388%40googlegroups.com.
Anthony Webb
Cri S
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/088f768f-efc6-49cd-8d06-e724cf15ee1d%40googlegroups.com.

Frank Herrmann
Anthony Webb
Sent from my iPhone
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/39aef4b8-e8cb-4d74-88a3-b4689f4040c1%40googlegroups.com.
Peter Betz
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/64238A11-C9BE-434D-A47A-63B312F4C7DB%40gmail.com.
Peter Betz
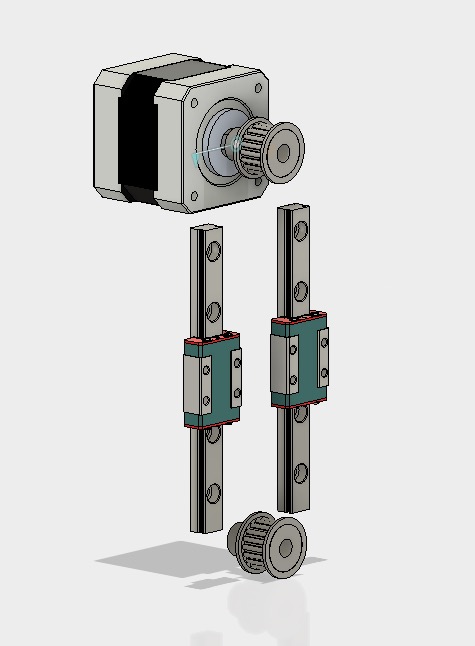
Here is an update on the pulley head (currently about 6" tall):






Thats not my final thought on the homing switch, but it is all I've got for the day!
Peter.

Jason von Nieda
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/e445083b-d7c3-46d4-8c6d-67d333e26973%40googlegroups.com.
Peter Betz
Peter Betz
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BQw0jx5MC6xdFbb4S3w9KFS%2B1Dzpan_KE%3D8QJw_5MpPq9-ezA%40mail.gmail.com.
Jason von Nieda
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/C574D6C8-ACD6-42BB-8CBF-874B030C3090%40gmail.com.

Michael Anton

Rich Obermeyer
Cri S
You surely don't want have limit switch when nozzle is maximum down. Travel seems to be a lot more then needed. What is distance motor nozzle tip including holder and overall travel.
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/4DC74D96-DAA4-4D19-B123-2E38F76E0CB7%40gmail.com.

Jason Parmenter
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAJGcfUgQsZawkAOu63%2Bz6EUG%3D8YeUDLFjEamPWAKyT4b_m-UJw%40mail.gmail.com.

Anthony Webb
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAP3w4qFN7wCaLMxkW-c5%2BaV9dT0z1uu266XqduYNHkw2w4m77Q%40mail.gmail.com.

HauntBots
I didn't want to hijack that thread so I started this one. My hardware
is completely different from what I've seen as the reference design and
I'm just wondering how much work will be involved in modifying code to
work with what I've got.
My head carries 3 nozzles,
The up down motion of the nozzles is operated pneumatically by 3
separate air valves.
However, all 3 nozzles are belt driven to rotate from one motor.
I haven't delved into the code but I was wondering if the software model
used to represent nozzles could be made to work with this.
Pete
Cri S
it need know, if drive
the head up or down, safely to the position where both heads are approx leveled.
Otherwise if something is below nozzle, nozzle get damaged. Offsets
from Zero is then
defined inside OpenPnP or from driver if using G54 coordinates or elsewhere.
Example, there is power outage after when the nozzle that have placed
max height cap and is returned to safeZ.
Now assume that the nozzle that have placed the cap is the nozzle
without limit switch and
it go full down based on you'r design.
User need to do homing, otherwise openpnp don't move.
Hit home, result is, nozzle get damaged because of homing process, or
to name it better
because unsafe Homing switch design.
2016-02-19 15:38 GMT, Anthony Webb <anthon...@gmail.com>:
>>>>
>>>>
>>>>
>>>> <https://lh3.googleusercontent.com/-KZ6V3Ay5H5A/Vsa5dIEZkyI/AAAAAAAAAgU/dmEvOQVBwsU/s1600/Screen%2BShot%2B2016-02-18%2Bat%2B10.38.44%2BPM.jpeg>
>>>>
>>>>
>>>>
>>>> <https://lh3.googleusercontent.com/-SgS1ir-lvd0/Vsa5gE9GyaI/AAAAAAAAAgY/KIKGibI4V0E/s1600/Screen%2BShot%2B2016-02-18%2Bat%2B10.39.00%2BPM.jpeg>
>>>>
>>>>
>>>>
>>>> <https://lh3.googleusercontent.com/-JowFx9MolF8/Vsa5i3P_0NI/AAAAAAAAAgc/T30I0j4v900/s1600/Screen%2BShot%2B2016-02-18%2Bat%2B10.39.14%2BPM.jpeg>
>>>>
>>>>
>>>>
>>>> <https://lh3.googleusercontent.com/-CC1AblgiGUA/Vsa5lZSVvMI/AAAAAAAAAgg/qT52cwYvtOI/s1600/Screen%2BShot%2B2016-02-18%2Bat%2B10.39.26%2BPM.jpeg>
>>>>
>>>>
>>>>
>>>> <https://lh3.googleusercontent.com/-RvuDjZK3FnM/Vsa5xWC_BMI/AAAAAAAAAgo/sI-tzVFvaTg/s1600/Screen%2BShot%2B2016-02-18%2Bat%2B10.43.58%2BPM.jpeg>
>>>>
>>>> Thats not my final thought on the homing switch, but it is all I've got
>>>> for the day!
>>>>
>>>>
>>>> Peter.
>>>>
>>>>
>>>> --
>>>> You received this message because you are subscribed to the Google
>>>> Groups "OpenPnP" group.
>>>> To unsubscribe from this group and stop receiving emails from it, send
>>>> an email to openpnp+u...@googlegroups.com.
>>>> To post to this group, send email to ope...@googlegroups.com.
>>>> To view this discussion on the web visit
>>>> https://groups.google.com/d/msgid/openpnp/e445083b-d7c3-46d4-8c6d-67d333e26973%40googlegroups.com
>>>> .
>>>>
>>>> --
>>>> You received this message because you are subscribed to a topic in the
>>>> Google Groups "OpenPnP" group.
>>>> To unsubscribe from this topic, visit
>>>> https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
>>>> To unsubscribe from this group and all its topics, send an email to
>>>> openpnp+u...@googlegroups.com.
>>>> To post to this group, send email to ope...@googlegroups.com.
>>>> To view this discussion on the web visit
>>>> https://groups.google.com/d/msgid/openpnp/4DC74D96-DAA4-4D19-B123-2E38F76E0CB7%40gmail.com
>>>> .
>>>>
>>> --
>>> You received this message because you are subscribed to the Google
>>> Groups
>>> "OpenPnP" group.
>>> To unsubscribe from this group and stop receiving emails from it, send
>>> an
>>> email to openpnp+u...@googlegroups.com.
>>> To post to this group, send email to ope...@googlegroups.com.
>>> To view this discussion on the web visit
>>> https://groups.google.com/d/msgid/openpnp/CAJGcfUgQsZawkAOu63%2Bz6EUG%3D8YeUDLFjEamPWAKyT4b_m-UJw%40mail.gmail.com
>>> .
>>> For more options, visit https://groups.google.com/d/optout.
>>>
>>
>>
>>
>> --
>>
>>
>>
>> JASON PARMENTER
>>
>>
>> Electrical Engineering | 208.339.0822
>>
>> ja...@tetontechnology.com
>>
>> tetontechnology.com
>>
>>
>>
>>
>>
>>
>> You received this message because you are subscribed to the Google Groups
>> "OpenPnP" group.
>> To unsubscribe from this group and stop receiving emails from it, send an
>> email to openpnp+u...@googlegroups.com.
>> To post to this group, send email to ope...@googlegroups.com.
>> To view this discussion on the web visit
>> <https://groups.google.com/d/msgid/openpnp/CAP3w4qFN7wCaLMxkW-c5%2BaV9dT0z1uu266XqduYNHkw2w4m77Q%40mail.gmail.com?utm_medium=email&utm_source=footer>
>> .
>> For more options, visit https://groups.google.com/d/optout.
>>
>
> --
> You received this message because you are subscribed to a topic in the
> Google Groups "OpenPnP" group.
> To unsubscribe from this topic, visit
> https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
> To unsubscribe from this group and all its topics, send an email to
> openpnp+u...@googlegroups.com.
> To post to this group, send email to ope...@googlegroups.com.
> To view this discussion on the web visit
Cri S
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/56C73DF2.7000906%40hauntbots.com.
Jason Parmenter
Sent from my iPhone
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CALsNZy35QjU-hErDC57%2BU_LLnwpFP94q1CqpKq87RgFQawwUSQ%40mail.gmail.com.
Peter Betz
Ok, lots of great feedback, I will try and hit on all of it:
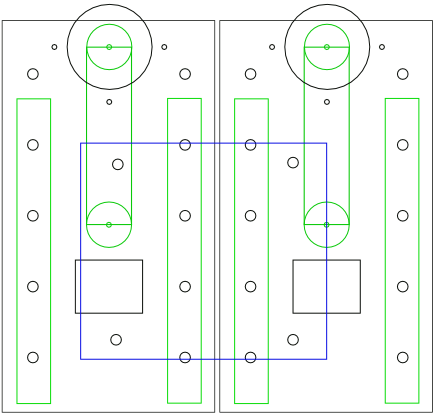
@ Michael: I understand the logic there but i am not prepared to buy into the difference in diameters between the pulleys, especially when you realize the optical difference you are seeing isn't even that much. The teeth of the belt will settle into the pulley and they will ride proud on the smooth idler. I already envisioned this difference and intend to attach the belt near the top of the carriages. Also, regarding diameter, I can't get too much smaller and move the rails together closer because one feature I am trying to keep is the ability to access the X axis carriage screws without disassembly. Also, regarding precision, I am more worried about speed than precision on spring loaded nozzles. If you or anyone else have more thoughts on all of this, please speak up and we can discuss further!
@ Maddogg: Yup, I agree with you, I will switch to mechanical. I have them on my mill and have been GREAT.
@ Cri and @ Jason: If the switch is not at the limit of one of the travels, how will it know which way to start moving to reach it? It has no idea where it is when it starts. I understand the logic here of not wanting it to slam into something if you chose to home it at the wrong spot, and you can't get it to move to a safe location forst in case it is already down.... Thoughts anyone??
@ Cri: you may have a point. Right now the rails are 100mm. 30mm of that is the carriage, so that leaves you 60mm total travel, or about 30mm on each tip. I suppose we could stick to 75mm rails, which would allow us 22.5mm travel on each tip if we run them to the end of the rails, which I assume is ok-ish. Or I could get 80mm rails made, to be safe. I don't think the price suffers from an odd cut. Based on my conversations with Sven. Thanks for pointing out your thoughts on this.
Thoughts on travel, is 22.5mm or slightly less totally fine??
Peter.
Jason Parmenter
Sent from my iPhone
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/aaa1a7b3-8480-4d01-8e4d-ad98f4f20e5e%40googlegroups.com.

FredG
Peter Betz
Chicken vs. Egg.
Peter.
Cri S
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/aaa1a7b3-8480-4d01-8e4d-ad98f4f20e5e%40googlegroups.com.
FredG
Jason von Nieda
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/57e4549f-074b-41eb-9826-d3b3be536e51%40googlegroups.com.
Peter Betz
Having said that, I have a VERY VERY cool idea for this issue. Going to PM Jason about it first before sharing it. Pretty excited!
Peter.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/606c9859-e890-4581-b2bd-62698144ccea%40googlegroups.com.
Jason von Nieda
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOvy4mYjXYW_QLkfJB_JdEqk26w-_qxKkc-fju%3Dru3eL0caM8Q%40mail.gmail.com.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BQw0jyVjm1BASFV4a7oi%3Dou-9VzRe3cudFAg5knMCj3bSWVtQ%40mail.gmail.com.
Jason von Nieda
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOvy4mY2RosHUf0uqoAtEj9R0zh6YRW6J1fsRRmcWarJOsFt8A%40mail.gmail.com.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CA%2BQw0jwN0vU%3DM6YfEovfFgb2k6x6f8fxdKw8QbOr8Gm9thETJw%40mail.gmail.com.
Jason von Nieda
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOvy4mYkQdEC9ysQmKweGyBRUt7q73_rhKcFHFSVT-UniDh7LQ%40mail.gmail.com.
Peter Betz
Peter Betz
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOvy4mYkQdEC9ysQmKweGyBRUt7q73_rhKcFHFSVT-UniDh7LQ%40mail.gmail.com.

Robert Walter
What I did was mount my optical limit switch at about the 1/4 down travel position (most convenient for me) for the left head. This ensures that the switch is NOT made when the heads are in their neutral position. In the homing routine, I first disable the head stepper drive for about a half second, which causes the spring loaded heads to always return to a neutral / known position. Then the standard homing routine in most motion controllers can handle the rest. Travel in a known direction, until the switch is made. This will typically load a fixed value of user choice into the position buffer. Then command the axis to go to zero with a G command. This should put your heads at the balanced / neutral / zero position.
Essentially, what you want to prevent is the ability for the homing routine to start looking for home (ie, moving in a fixed direction), when it is already past the limit switch. Since it is past the limit switch, it wont find it and try to drive a head into the machine bottom, or worse, your board. Always starting from an absolute known position is critical. Of course, having limits on both ends of travel so you can avoid this is possible, but you can get the same effect with using the springs to push your cam back to a relatively close to neutral position, so that you are sure that heading in a fixed direction will get you to the switch.
Rob.
Anthony Webb
HauntBots
Here is a video of my machine running:
https://youtu.be/2k63xUrsnMQ
Only 1 of the 3 nozzles is in use on this test run.
Pete
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/7fe3214b-7d3b-41d1-abcb-8a273055b281%40googlegroups.com.
Anthony Webb
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/56C7CF46.2030301%40hauntbots.com.
Peter Betz
Ok, Here was my idea:






Peter Betz
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/f0b59201-5271-4b67-a164-b1e29de624d5%40googlegroups.com.
Anthony Webb
Robert Walter
Other than that, beautiful CAD drawings.
Robert Walter
On Sunday, February 14, 2016 at 12:45:56 PM UTC-8, Peter Betz wrote:
Hi Guys,Moved to a new thread to discuss the head I will implement for Anthony's PnP design. I don't want to buy the $300 robotdigg one.Here are the two contenders:1. A more compact and direct to carriage mounting robotdigg style head (tried and true):
2. A belt driven setup that will force down and force up (I will model this one to compare in the next day or so, should be really easy and use less parts.....), another variant would let gravity move it down:
Peter Betz
Peter Betz
Peter Betz
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/8b7fc824-bf1f-4448-bd25-53b6ea02aaab%40googlegroups.com.
Rich Obermeyer
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/fa628e6b-b6c0-44bd-9865-a02c9182b6c5%40googlegroups.com.
Peter Betz
Peter Betz
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CAOvy4mbNeW7hBebsecFwzOZyfdzs3JwBB9ENAWTD-4SrSwRLDw%40mail.gmail.com.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/DB8D14C8-9F08-46F7-BBA6-DEA6B8D3C0FC%40gmail.com.
Peter Betz
Peter Betz
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/3C362067-C96F-42DF-B139-1E1CA7E06413%40gmail.com.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/5630A9FF-8560-4F19-9C22-F2659F1050DC%40gmail.com.
Peter Betz
Peter Betz
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/C50E8798-F968-481D-B5FE-CC2711DD9141%40gmail.com.
Rich Obermeyer
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/2FCCB9B2-18CF-4648-9F15-CC8991F5C169%40gmail.com.

Malte R.
why not use two endstops, one for each head?
Could be trigger switch, optical, reed + magnet or hall-sensor + magnet; all have their advantages and disadvantages.
But with one motor driving two heads and a potentially unknown start position, it seems to be the safest to measure both extreme positions - or am I missing something?
Regards
Malte
Robert Walter
If you want perfection (near), get a small encoder, or better yet, get a small servo drive / motor pair or closed loop stepper system. The servo / closed loop stepper will be far easier to implement, as you can feed it with step / direction signals, so it would appear no different than a normal stepper. The matching drive will have the input for the stepper. However, you will still need to home accurately with some form of switch, unless of course, your servo / stepper encoder has a Z / Index pulse, then you could theoretically use that by disabling the drive, allowing springs to center the heads, and then search for the first occurrence of the index pulse, and call that the reference point relative to home. But in the end positional accuracy will be excellent.
Peter Betz
Peter Betz
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/95e9babf-9d4b-4b4a-96e3-0345aebb6a39%40googlegroups.com.
Anthony Webb
Peter Betz




FredG
in my opinion this is the best solution! When you reach the index position you know (after configuration) how far you can go in both directions. In this way it is defined to lift the lower head for homing.
Maybe its easier to screw a stripe of metal or plastic on the side. It will also reach deeper into the optical sensor...
FredG
FredG
Anthony Webb
Peter Betz



Jason Parmenter
Michael Anton
Peter Betz
Peter Betz
--
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/2aa81506-70a8-4b6e-b8b3-0f39ff110eed%40googlegroups.com.
Robert Walter
If you go limit switch, no problems at, just connect between the input and ground. The input has a built in pullup.
If you go photo-interrupter, then make sure you have a current limit resistor in place on the emitter side to properly drive the LED. This resistor would be in series between the source voltage and the LED.
Rob.
Rich Obermeyer
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/7722627b-9819-4e70-9096-e255188d005a%40googlegroups.com.
Peter Betz



Peter Betz

Anthony Webb
Sent from my iPhone
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/b68e3f4a-22f0-47fb-bc31-f86c62f18a6a%40googlegroups.com.
Peter Betz
Michael Anton
Michael Anton
Peter Betz
Yes on the backlash, I am sure there will be, but like you said, I think it won't matter.
I think the only thing you are missing is room to have the sensor near the rail and carriage. Maybe you mean to turn the sensor on its side.... interesting. I am sure things could be tightened up a bit, I am going to try and only make the new head grow in height for homing. I am also trying to keep the number of machining operations to a minimum, for example, the wing sensor idea requires only milling and drilling in the Z plane, no holes to drill and tap on the sides, etc.
Stand by for more!
Peter.
Peter Betz
Completely re modelling to make it clean.... Pretty much back to where you all saw it last:

Anthony Webb
Peter Betz





Will be refining, and some dimensions need tweaking, for example, if We are going to have the opto sensor interrupter on the back side of the Z carriage, I will need to move the NEMA 8's out a bit to make room for the screws, don't want to have to machine on both sides (pockets for the screw head).
For a full view, click here.
Let me know what you guys think. Ordering all the rails tonight!
Oh, Anthony, will I be able to attach the belt to the bottom of this thing? Or maybe I should just mount this to one of your carriage blocks.....
Peter.
Peter Betz
Jason Parmenter
Oh, and I made this version to incorporate the cheap opto endstops that Anthony spec's for the rest of the machine. Now they are all the same.Peter.
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/eced2693-4ff1-4202-b764-b017c9f02d8c%40googlegroups.com.
Anthony Webb
Peter Betz
Anthony Webb
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/28d87a00-64b9-474c-9a81-6342573515e7%40googlegroups.com.
Peter Betz
You received this message because you are subscribed to a topic in the Google Groups "OpenPnP" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/openpnp/-XGpRTdaTrk/unsubscribe.
To unsubscribe from this group and all its topics, send an email to openpnp+u...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/CALsNZy2NVoBsZ%3DPLHJyQ6GRiY3rnf5wuYF%2BkYsiqF43JdOVRmg%40mail.gmail.com.
Anthony Webb
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/EADE29DB-DB05-48FF-949F-E1113982876D%40gmail.com.

Tim Kent
Michael Anton
On Tuesday, February 23, 2016 at 10:29:07 PM UTC-7, Peter Betz wrote:
Peer review time!!Introducing...... the ICE PICK.. (Name TBD)

Joao Matos
Anthony Webb
--
You received this message because you are subscribed to the Google Groups "OpenPnP" group.
To unsubscribe from this group and stop receiving emails from it, send an email to openpnp+u...@googlegroups.com.
To post to this group, send email to ope...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/openpnp/fdda6b24-7766-4844-9156-c8a3f959baa5%40googlegroups.com.