Dealing with backlash and wind
83 views
Skip to first unread message

Scott Badger
Sep 21, 2021, 12:09:42 PM9/21/21
to Open PHD Guiding
I’m generally new to astrophotography (less than a year), and newer to auto-guiding, and am looking for any help to improve my results. In particular, help dealing with my mount’s backlash (6 – 7 seconds) and my somewhat windy home site. I have a CGEM and though the hypertune I did on it eliminated nearly all of the mount’s own gearing backlash, the DEC motor still has significant backlash in its gear box. I’ve looked at a couple replacement motors, but they were nearly as bad. Wind is an issue as well. I have a C9.25 and when the dew shield is on, even if you sneeze in its direction…..
Below are the details of my gear and PHD2 setup. I’ve also included a screenshot from a couple nights ago that shows the best guiding I’ve seen so far at a total RMS of 0.8”, but it was a best-case scenario of good seeing and dead calm (and full moon…of course!....). But to get that, I had PEC running on the mount, used PHD2’s predictive PEC for RA, bin 2x2, and had DEC set to one direction only, and had the mount balanced east & camera heavy. I tried resist switch with backlash compensation enabled, but total RMS was 1.25, at least with the settings I was using.
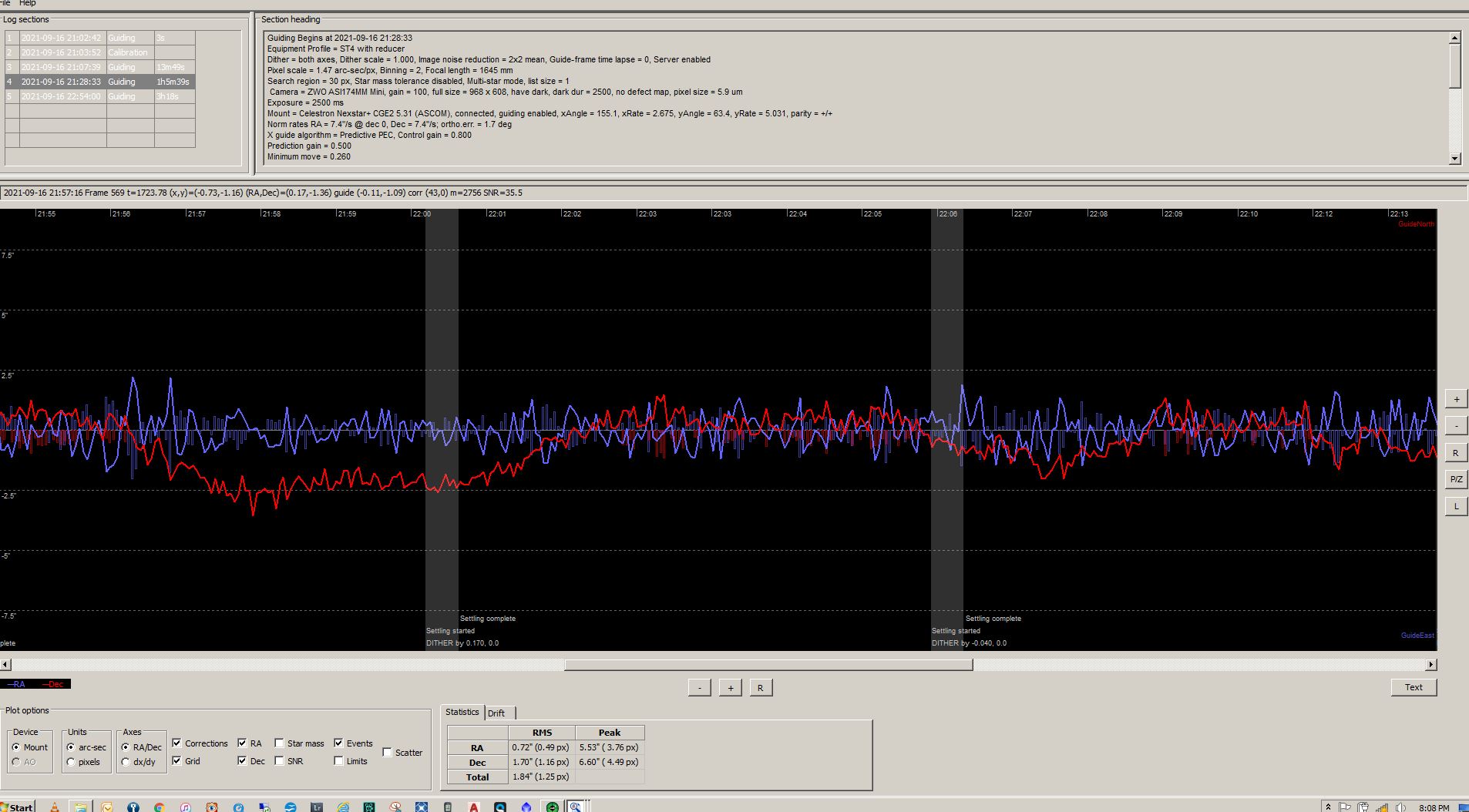
The second screenshot is from a previous night and shows the effect of a very light breeze. The bump was in the opposite direction that PHD2 was set to guide in and given the time taken for the mount to drift back to center (nearly %%% min), should I introduce more error in the polar alignment?
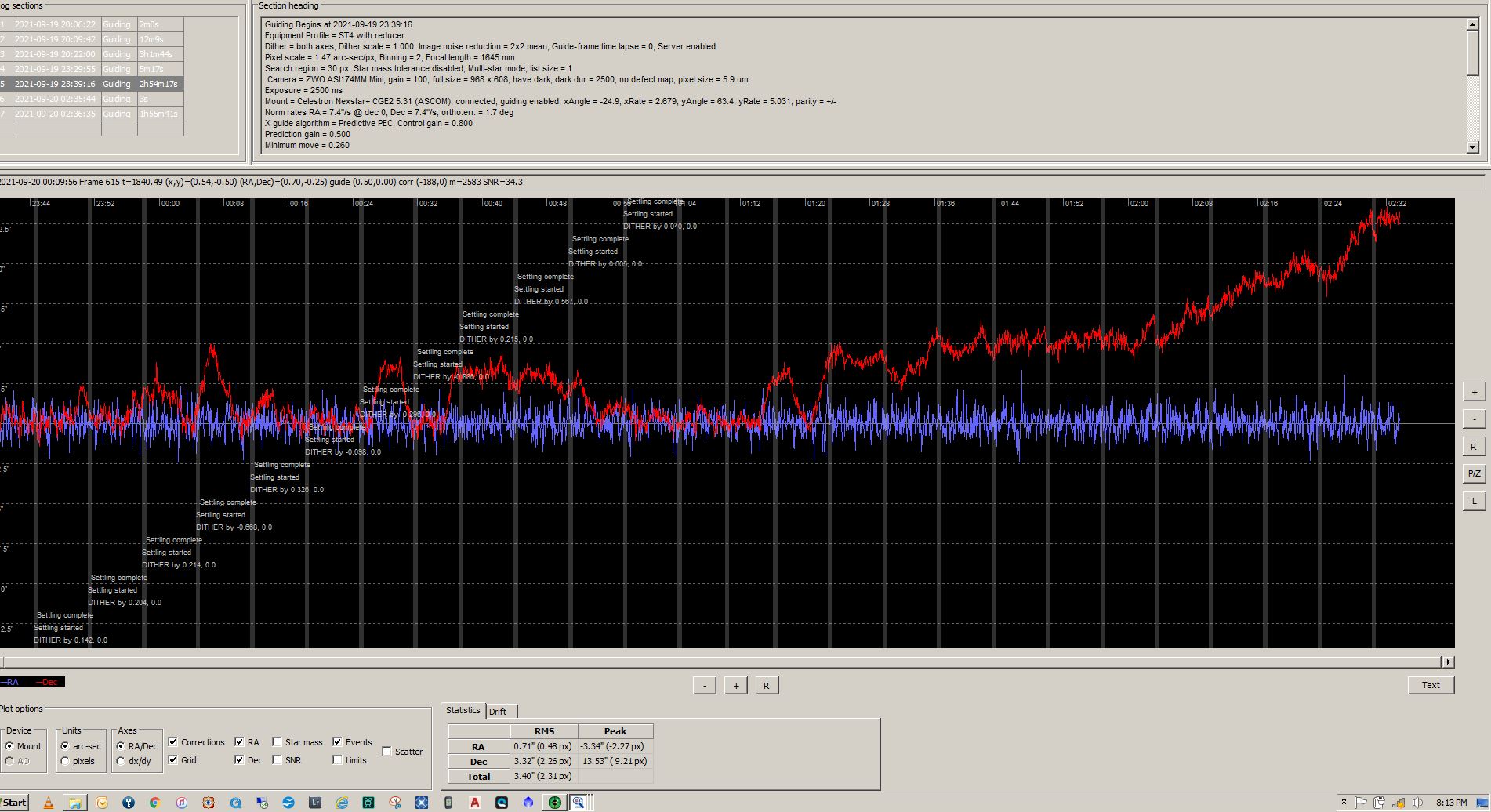
The third screenshot is also from my last night out and shows what happened after I re-slew to the target to force a meridian flip and then went back to bed thinking everything was going fine…... Obviously, I had DEC guiding set to the wrong direction, but wonder why it appeared start out fine, and even return to center after being ‘bumped’ (breeze, probably) a couple times, and then &&& min later finally start to drift.
Cheers,
Gear:
C9.25 edgeHD with .7x reducer (FL = 1645mm)
CGEM mount (bought used, about 7 years old) balanced camera and east heavy.
ZWO OAG
ZWO ASI174MM (guide camera)
PHD2 settings:
RA – algorithm=Predictive PEC, PredWt=50, ReactWt=80, MinMo=.26
DEC – one direction only, Agr=100, MinMo=.26
Site: Bortle 2/3
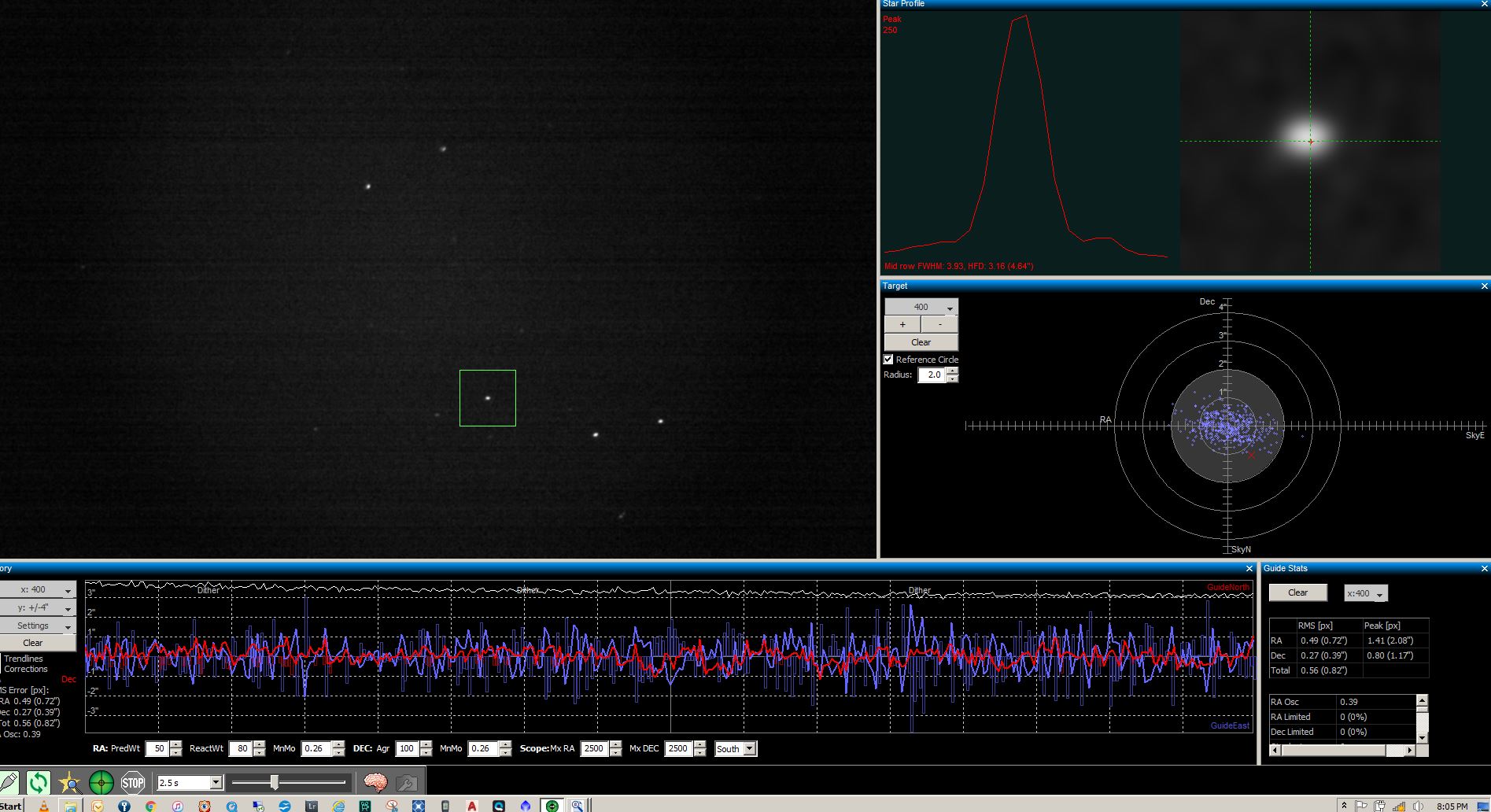
Below are the details of my gear and PHD2 setup. I’ve also included a screenshot from a couple nights ago that shows the best guiding I’ve seen so far at a total RMS of 0.8”, but it was a best-case scenario of good seeing and dead calm (and full moon…of course!....). But to get that, I had PEC running on the mount, used PHD2’s predictive PEC for RA, bin 2x2, and had DEC set to one direction only, and had the mount balanced east & camera heavy. I tried resist switch with backlash compensation enabled, but total RMS was 1.25, at least with the settings I was using.
The second screenshot is from a previous night and shows the effect of a very light breeze. The bump was in the opposite direction that PHD2 was set to guide in and given the time taken for the mount to drift back to center (nearly %%% min), should I introduce more error in the polar alignment?
The third screenshot is also from my last night out and shows what happened after I re-slew to the target to force a meridian flip and then went back to bed thinking everything was going fine…... Obviously, I had DEC guiding set to the wrong direction, but wonder why it appeared start out fine, and even return to center after being ‘bumped’ (breeze, probably) a couple times, and then &&& min later finally start to drift.
Cheers,
Scott
Gear:
C9.25 edgeHD with .7x reducer (FL = 1645mm)
CGEM mount (bought used, about 7 years old) balanced camera and east heavy.
ZWO OAG
ZWO ASI174MM (guide camera)
PHD2 settings:
RA – algorithm=Predictive PEC, PredWt=50, ReactWt=80, MinMo=.26
DEC – one direction only, Agr=100, MinMo=.26
Site: Bortle 2/3
Scott Badger
Sep 21, 2021, 4:11:22 PM9/21/21
to Open PHD Guiding
Sorry, forgot to fill in the time to return to center (4 min) and time to start drifting (almost 90 min) in my original post.
Scott

bw_msgboard
Sep 21, 2021, 4:16:46 PM9/21/21
to open-phd...@googlegroups.com
Hi Scott. What you really forgot was to submit your PHD2
log files. You can use the built-in log upload facility, Help/Upload
logs...
https://openphdguiding.org/getting-help/
Screen-shots aren't sufficient to do any meaningul analysis of problems.
Regards,
Bruce
From: open-phd...@googlegroups.com [mailto:open-phd...@googlegroups.com] On Behalf Of Scott Badger
Sent: Tuesday, September 21, 2021 1:11 PM
To: Open PHD Guiding
Subject: [open-phd-guiding] Re: Dealing with backlash and wind
--
You received this message because you are subscribed to the Google Groups "Open PHD Guiding" group.
To unsubscribe from this group and stop receiving emails from it, send an email to open-phd-guidi...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/c0a35abd-b4ef-4d69-b01f-778fca3b7a21n%40googlegroups.com.
You received this message because you are subscribed to the Google Groups "Open PHD Guiding" group.
To unsubscribe from this group and stop receiving emails from it, send an email to open-phd-guidi...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/open-phd-guiding/c0a35abd-b4ef-4d69-b01f-778fca3b7a21n%40googlegroups.com.
Scott Badger
Sep 22, 2021, 10:40:42 AM9/22/21
to Open PHD Guiding
Hi Bruce, I don’t have the logs at hand right now but will send them tonight
when I get home. Note that in the logs there are a number of disturbances caused by my
changing the battery in my DSLR (didn’t stop guiding because I didn’t want to
re-start the Predictive PEC process), my blasting the corrector plate with a
hair dryer to clear the dew, and star loss due to clouds or dew but while I was
in bed and not available to make corrections, so I wasn’t sure how valuable the
data is. The screenshots were intended to show periods of guiding without those other types of disturbances.
Cheers,
Scott
Scott
Scott Badger
Sep 22, 2021, 5:03:08 PM9/22/21
to Open PHD Guiding
Here's the link to the logs https://openphdguiding.org/logs/dl/PHD2_logs_8SKL.zip.
Regarding the delayed drift (third screen shot, 5th guiding session in the 9/19 log), here a bit more information. Initially, the scope was on the west side and I had guiding set to south only. After a couple hours, the mount had almost reached the RA limit for that side, so I re-slew to the target using the mount's goto which moved the scope over to the east side and as with other nights, I the switched guiding to North only. After guiding as expected for 10 minutes or so, I went back to bed. A couple hours after that, I came back out to change the camera battery etc. and saw that the guide star had drifted. So, I switched guiding back to south only and the rest of the night went fine. FWIW, at the point that I came out and found the star had been drifting, the scope was nearly directly over the pier. Also, I just read in PHD2's documentation about the 'reverse DEC output after meridian flip' setting which I have disabled (didn't know anything about it until just now)....does that play into this at all?
Thanks!
Scott
Reply all
Reply to author
Forward
0 new messages