Using moveit with 5-DoF arm

Steffen P

Michael Ferguson
Steffen P
Thank you for the reply. Yesterday I have looked into moveit_ikfast but wasn't sure if it would really help me.
With this translationdirection5d ik installed can you just call move_group.pickup("object") and you get a ik solution?
What exactly do you mean with " until I had the end effector link oriented "correctly" for openrave." Did you have to change the urdf or do you give a correct grasp as parameter into the pickup call?
Thank you very much again, I'll directly try ikfast again!
Michael Ferguson

Martin Günther
Michael Ferguson <mfe...@gmail.com> wrote:
> Yes, with an IKfast solution, you should be able to call pickup and
> have things work.
>
> As for "until I had the end effector oriented..." -- yes, I had to
> change the orientation of the last link in my chain, apparently there
> is some assumption built into openrave (I found a number of threads
> point to changing the "manipulator" direction if you were using
> openrave directly, but nothing specific to my exact problem. Rotating
> the frame fixed the issue, but in looking at it, it was really a poor
> original choice that might have been the culprit -- you'll know if
> you have a problem real fast, because ikfast.py will basically die
> with some horrible error if things aren't perfect.
>
> -Fergs
Since you (Steffen) are also using a Katana arm, I thought I'd chime
in. I've been using the OpenRAVE IKFast 5Dof plugin since Diamondback
[1], but abandoned it at some point because it's made for the Katana
6M180 (with the straight gripper), and we have a 6M90A (with an angled
gripper), and the assumptions of the 5DoF IK don't hold for us.
IIRC, you have a 6M180, so the IKFast plugin should be perfect for
you. Collada descriptions for all Katana robots are here [2], plus a
README that's probably badly out of date (patches to both README and
Collada files are welcome!). I've never used Dave's moveit_ikfast, but
it looks awesome, so you should better start from the instructions
there [3].
Regarding the direction: I also had this issue back then, so this [4]
might be useful.
Let me know how it goes, maybe it gives me hope to try this path once
again for our Katana version. :-)
Cheers,
Martin
[1]: https://github.com/uos/katana_manipulation/tree/a4e040169456c93664a880cba4a3951d1c6c7ad7/katana_kinematics_constraint_aware
[2]: https://github.com/uos/katana_driver/tree/groovy/katana_description/collada
[3]: http://moveit.ros.org/wiki/Kinematics/IKFast
[4]: http://answers.ros.org/question/9988/openrave-ik-fails-to-find-a-solution-on-katana-6m90a-arm/
--
Dipl.-Inf. Martin Günther
Universität Osnabrück
Institut für Informatik
Albrechtstr. 28 (Raum 31/503)
D-49076 Osnabrück
Telefon: +49 (0)541 969 2434
http://www.inf.uos.de/mguenthe/
Steffen P

Michael Ferguson
Steffen P
Steffen P
Am Mittwoch, 19. Juni 2013 22:44:42 UTC+2 schrieb Fergs:
Ioan Sucan
https://github.com/ros-planning/moveit_core/issues/75
Steffen P
Is there already some code written to support < 6 dof arms?
Ioan Sucan:
Michael Ferguson
Martin Günther
I'm pretty sure I solved it! (Scroll down to where the code begins for
the solution, I'm not very good at making a story short.)
Disclaimer: The IKFast plugin I generated is for arm_navigation on
Fuerte, but the solution below should apply to MoveIt as well.
I spent the last 3 days generating an IKFast plugin for the Katana
6M90a (once again; my first try was more than two years ago), this time
following this [1] tutorial. I ran into similar problems as Steffen
with his 6M180. The position works, but the rotation is off. Here's
a video of that:
http://vimeo.com/69235449
The vital hint is in the ComputeIk() doc in ikfast.h:
- ``eerot``
- For **Transform6D** it is 9 values for the 3x3 rotation matrix.
- For **Direction3D**, **Ray4D**, and **TranslationDirection5D**, the first 3 values represent the target direction.
- For [...]
The IKFastKinematicsPlugin::solve() method in <my_robot>_<manipulator>_ikfast_plugin.cpp
calls ComputeIk() with a rotation matrix (as is expected for Transform6D),
but for TranslationDirection5D, ComputeIk() expects a vector.
With the following fix, everything works perfectly:
int IKFastKinematicsPlugin::solve(KDL::Frame &pose_frame, const std::vector<double> &vfree)
{
// IKFast56/61
solutions_.Clear();
//KDL::Rotation rot = KDL::Rotation::RotY(M_PI/2);
KDL::Rotation orig = pose_frame.M;
KDL::Rotation mult = orig;//*rot;
-
- double vals[9];
- vals[0] = mult(0,0);
- vals[1] = mult(0,1);
- vals[2] = mult(0,2);
- vals[3] = mult(1,0);
- vals[4] = mult(1,1);
- vals[5] = mult(1,2);
- vals[6] = mult(2,0);
- vals[7] = mult(2,1);
- vals[8] = mult(2,2);
+ KDL::Vector direction = mult * KDL::Vector(0, 0, 1);
double trans[3];
trans[0] = pose_frame.p[0];//-.18;
trans[1] = pose_frame.p[1];
trans[2] = pose_frame.p[2];
// IKFast56/61
- ComputeIk(trans, vals, vfree.size() > 0 ? &vfree[0] : NULL, solutions_);
+ ComputeIk(trans, direction.data, vfree.size() > 0 ? &vfree[0] : NULL, solutions_);
return solutions_.GetNumSolutions();
}
Best wishes,
Martin
[1]: http://ros.org/wiki/Industrial/Tutorials/Create_a_Fast_IK_Solution
Michael Ferguson

Patrick Goebel
"LookAt3D" IK to work with a pan-and-tilt head. I'll give it a try this
weekend and report back. (I already tried it without your modification
and it did not work with the generated MoveIt plugin. Now I know why.)
Thanks Martin!
--patrick
Martin Günther
Patrick Goebel <pat...@pirobot.org> wrote:
> This is very exiting since it suggests I might be able to get the
> "LookAt3D" IK to work with a pan-and-tilt head. I'll give it a try
> this weekend and report back. (I already tried it without your
> modification and it did not work with the generated MoveIt plugin.
> Now I know why.)
>
> Thanks Martin!
Not sure whether my fix will work for the LookAt3D IK, since the
ikfast.h comments for ComputeIk() don't mention it (make sure to read
that). Intuitively, I'd guess LookAt3D only requires a translation
(eetrans) and ignores eerot completely; that's something that's easy to
find out by looking into the generated code and check which elements of
eetrans/eerot are accessed. For TranslationDirection5D, it's only
eetrans[0-2] and eerot[0-2]; for Transform6D, it's eetrans[0-2] and
eerot[0-8].
Best,
Martin

Dave Coleman
Steffen P
Hello Martin,
Steffen P
Martin Günther
On Mon, 1 Jul 2013 02:52:00 -0700 (PDT),
Steffen P <s.pfi...@gmail.com> wrote:
> I first tried directly pasting your code into my ikfast_plugin.cpp
> but it was not getting better.
> So I changed the KDL::Vector to (1,0,0) which let me move around with
> the interactive markers much better.
> Why did you choose the (0,0,1) vector?
> What does the KDL::Vector exactly mean? Is it the grasp direction in
> the gripper frame?
>
> Which link did you choose as end effector link?
> I currently "use katana_motor5_wrist_roll_link" but I think it's
> orientation is a pretty bad choice.
What I did is I modified the URDF so that the katana_gripper_tool_frame
link's origin is in the center of the gripper, and that its z axis
points in the direction of the fingers.
TranslationDirection5D seems to be defined as "x/y/z of desired and
achieved pose are equal, and z axis of desired and achieved pose point
into the same direction". That means rotation around the z axis is
allowed.
I experimented with different values for the <direction> tag in the
*.robot.xml, but the C++ code generated by IkFast was always the same, so
I assume it's always the z axis (and this is why I've hard coded
KDL::Vector(0, 0, 1)). If you find out that's not true, let me know. In
the end I ignored the .robot.xml file completely and used the .dae file
directly.
The katana_motor5_wrist_roll_link was also my first choice, but it
turns out it's a really bad one because its z axis coincides with
the motor5 joint axis, and since rotation around the z axis is allowed,
we completely lose the effect of moving one joint (motor5).
It turns out that z has to be oriented that way for our gripper because
this is the only axis we can't control (that's the missing DoF). For
your arm, it's different (see below).
What I'd do in your place is this:
* throw away the .robot.xml file
* edit your URDF so that your tool frame is between the fingers, but
the z axis is perpendicular to the fingers (hard to describe; if the
gripper was lying flat on the table, z should be pointing up).
* regenerate your .dae file (see tutorial)
* regenerate your ikfast file
If that works, you can still go back to making it work with your .robot.xml file.
I see you've already found my updates to the katana_driver repo;
there's also a matching branch called ikfast in the kurtana_robot repo.
FYI, here are the OpenRAVE commands used to generate the plugin code:
$ openrave-robot.py katana_450_6m90a.dae --info links
name index parents
-----------------------------------------------------------------
katana_base_link 0
katana_motor1_pan_link 1 katana_base_link
katana_motor2_lift_link 2 katana_motor1_pan_link
katana_motor3_lift_link 3 katana_motor2_lift_link
katana_motor4_lift_link 4 katana_motor3_lift_link
katana_motor5_wrist_roll_link 5 katana_motor4_lift_link
katana_gripper_link 6 katana_motor5_wrist_roll_link
katana_l_finger_link 7 katana_gripper_link
katana_r_finger_link 8 katana_gripper_link
katana_gripper_tool_frame 9 katana_motor5_wrist_roll_link
-----------------------------------------------------------------
name index parents
# generate katana_450_6m90a.dae (can also be found in katana_description/collada/)
rosrun xacro xacro.py $(rospack find katana_description)/urdf/katana_450_6m90a.urdf.xacro > katana_450_6m90a.urdf
rosrun collada_urdf urdf_to_collada katana_450_6m90a.urdf katana_450_6m90a.dae
# generate kurtana_arm_ikfast_solver.cpp (can also be found in katana_ikfast_kinematics_plugin/src/katana_450_6m90a_ikfast_plugin.cpp)
/usr/lib/python2.7/dist-packages/openravepy/_openravepy_0_8/ikfast.py --robot=katana_450_6m90a.dae --iktype=translationdirection5d --baselink=0 --eelink=9 --savefile=katana_450_6m90a_ikfast_plugin.cpp
# This lead to a "RuntimeError: maximum recursion depth exceeded", so I had to add
# sys.setrecursionlimit(100000)
# into /usr/lib/python2.7/dist-packages/openravepy/_openravepy_0_8/ikfast.py
> For our Katana the grasp direction is (0,0,-1).
katana*.robot.xml?
Cheers,
Martin
Steffen P
Hey Martin,
first thanks for the detailed description.
I saw the changes in your urdf and adapted mine and converted it to dae.
I now have it running and behaving well in rviz.
For rviz to behave correctly, I had to change the parent frame of the gripper to the gripper tool frame (in the moveit assistant). Now the interactive markers display correctly.
For the first time I was able to programmatically set a pose:
Position 0.35 0 0.90
Orientation 0 0 0 1
But if I try the same pose just with the position's y value set to 0.05 it doesn't find a solution. But I'll try more tomorrow.
Does this work for you?
I'll send you a pull request for the changes for our Katana as soon as it works.
>> For our Katana the grasp direction is (0,0,-1).
>Where do you specify that? In the <direction> tag of the
>katana*.robot.xml?
I never used the robot.xml. I just tried to describe the gripper direction in the wrist roll frame.
Thanks again!
I hope I can finally really start my master thesis tomorrow (after 4 months ; -) )
Greetz,
Steffen
Martin Günther
Steffen P <s.pfi...@gmail.com> wrote:
> Hey Martin,
> first thanks for the detailed description.
> I saw the changes in your urdf and adapted mine and converted it to
> dae. I now have it running and behaving well in rviz.
> For rviz to behave correctly, I had to change the parent frame of the
> gripper to the gripper tool frame (in the moveit assistant). Now the
> interactive markers display correctly.
> For the first time I was able to programmatically set a pose:
> Position 0.35 0 0.90
> Orientation 0 0 0 1
>
> But if I try the same pose just with the position's y value set to
> 0.05 it doesn't find a solution. But I'll try more tomorrow.
first is actually reachable with your arm, the second is not: If y
is != 0, yaw can't be 0, but has to have a certain angle (something
like atan2(y, x)). BUT this is exactly where 5D IK should help: because
rotations around z are okay, the IK should figure out the correct yaw
angle automagically.
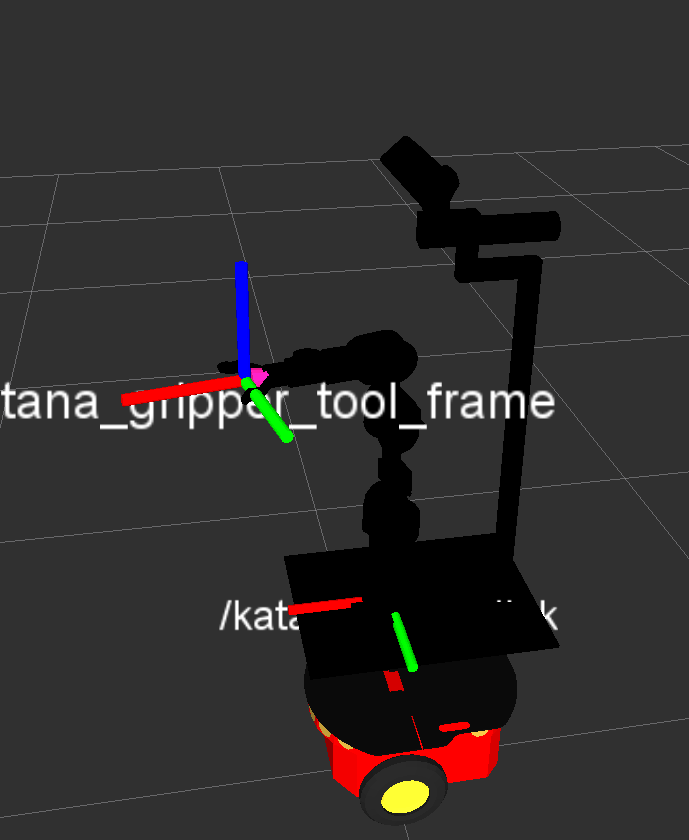
Do you have an RViz screenshot that shows the TF of the
katana_gripper_tool_frame? (To check where your Z axis goes).
A simpler explanation would be of course that the new position is
simply outside the workspace.
As a simple way to distinguish between those two possibilities, I
recommend the following. Put some debug output into your plugin like
this:
https://github.com/uos/katana_driver/commit/39156b893d6f5bc700f607dc87ba12f77d08f55d
Then set your logger level properly and move the gripper in RViz. You
should see the output. Now when you move the gripper first in the -x
direction and then in the y direction, you should see that the IK
figures out the yaw angle by itself. If not, probably the direction of
the tool frame's z axis was a bad choice.
Cheers,
Martin
Steffen P
Well, first of all the difference between the two poses is that the
first is actually reachable with your arm, the second is not: If y
is != 0, yaw can't be 0, but has to have a certain angle (something
like atan2(y, x)). BUT this is exactly where 5D IK should help: because
rotations around z are okay, the IK should figure out the correct yaw
angle automagically.
Do you have an RViz screenshot that shows the TF of the
katana_gripper_tool_frame? (To check where your Z axis goes).
A simpler explanation would be of course that the new position is
simply outside the workspace.
As a simple way to distinguish between those two possibilities, I
recommend the following. Put some debug output into your plugin like
this:
https://github.com/uos/katana_driver/commit/39156b893d6f5bc700f607dc87ba12f77d08f55d
Then set your logger level properly and move the gripper in RViz. You
should see the output. Now when you move the gripper first in the -x
direction and then in the y direction, you should see that the IK
figures out the yaw angle by itself. If not, probably the direction of
the tool frame's z axis was a bad choice.
Martin Günther
On Wed, 3 Jul 2013 09:45:57 +0200,
Steffen P <s.pfi...@gmail.com> wrote:
> Yes, in RVIZ I can nicely move the gripper around and it automatically
> adjusts the yaw angle.
> I have just noticed that my ikfast_moveit_plugin.cpp looks different
> than your's:
> Did you use the moveit ikfast script or do you currently use ikfast
> without moveit?
arm_navigation for now:
http://ros.org/wiki/Industrial/Tutorials/Create_a_Fast_IK_Solution/arm_navigation_plugin
Yesterday I've also gone through the moveit tutorial and added a moveit
plugin here, which should look much more similar to yours:
https://github.com/uos/katana_driver/tree/groovy/katana_moveit_ikfast_plugin
Patrick Goebel
However, when I try to launch the demo.launch file for my robot, I get the following fatal errors:
[ INFO] [1372858979.940463944]: No root joint specified. Assuming fixed joint
[ INFO] [1372858980.400225773]: head_pan_joint -2.9 2.9 1
[ INFO] [1372858980.400310319]: head_tilt_joint -2.9 2.9 1
[FATAL] [1372858980.409408785]: Joint numbers mismatch: URDF has 3 and IKFast has 2
[ERROR] [1372858980.409559244]: Kinematics solver of type 'pedestal_pi_no_gripper_right_arm_kinematics/IKFastKinematicsPlugin' could not be initialized for group 'right_arm'
I've double-checked my URDF file and it only has 2 non-fixed joints for the head group. Also, if I edit my kinematics.yaml file and change the IK solver for the head to KDL instead of the IKFast lookat3d plugin, then demo.launch runs fine--both solvers are loaded without error but of course now I don't have the IKFast solver for the head group.
Any thoughts about what might be going on?
Thanks,
patrick
P.S. My kinematics.yaml file looks like the following. (If I un-comment the first line and comment the second line to use the lookat3d solver for the head, I get the errors described above).
head:
#kinematics_solver: pedestal_pi_no_gripper_head_kinematics/IKFastKinematicsPlugin
kinematics_solver: kdl_kinematics_plugin/KDLKinematicsPlugin
kinematics_solver_attempts: 3
kinematics_solver_search_resolution: 0.005
kinematics_solver_timeout: 0.05
right_arm:
kinematics_solver: pedestal_pi_no_gripper_right_arm_kinematics/IKFastKinematicsPlugin
kinematics_solver_attempts: 3
kinematics_solver_search_resolution: 0.005
kinematics_solver_timeout: 0.05
Michael Ferguson
Patrick Goebel
I don't have a torso lift joint and I believe my base frame is correct (I just use the base_link frame). I tried your hack anyway but I still got the same "joint count mismatch error". I'm thinking there is a problem with the way the generated IKFast .cpp code is counting the joints in my use case so I'll look at that in more detail.
--patrick
Steffen P

Ioan Sucan
It looks like the call to searchPositionIK() in the IK plugin does not call .resize() on the solution vector. If you insert that call, that assertion should be met.
Ioan

{kind=link}