
raanan arbel

Ghica
I have this working for a Sparki robot from Arcbotics, controlling it with an AI2 app, but yours may have a very different API.
So, maybe you could be more specific about what your Arduino expects to control its servo.
Cheers, Ghica.
raanan arbel

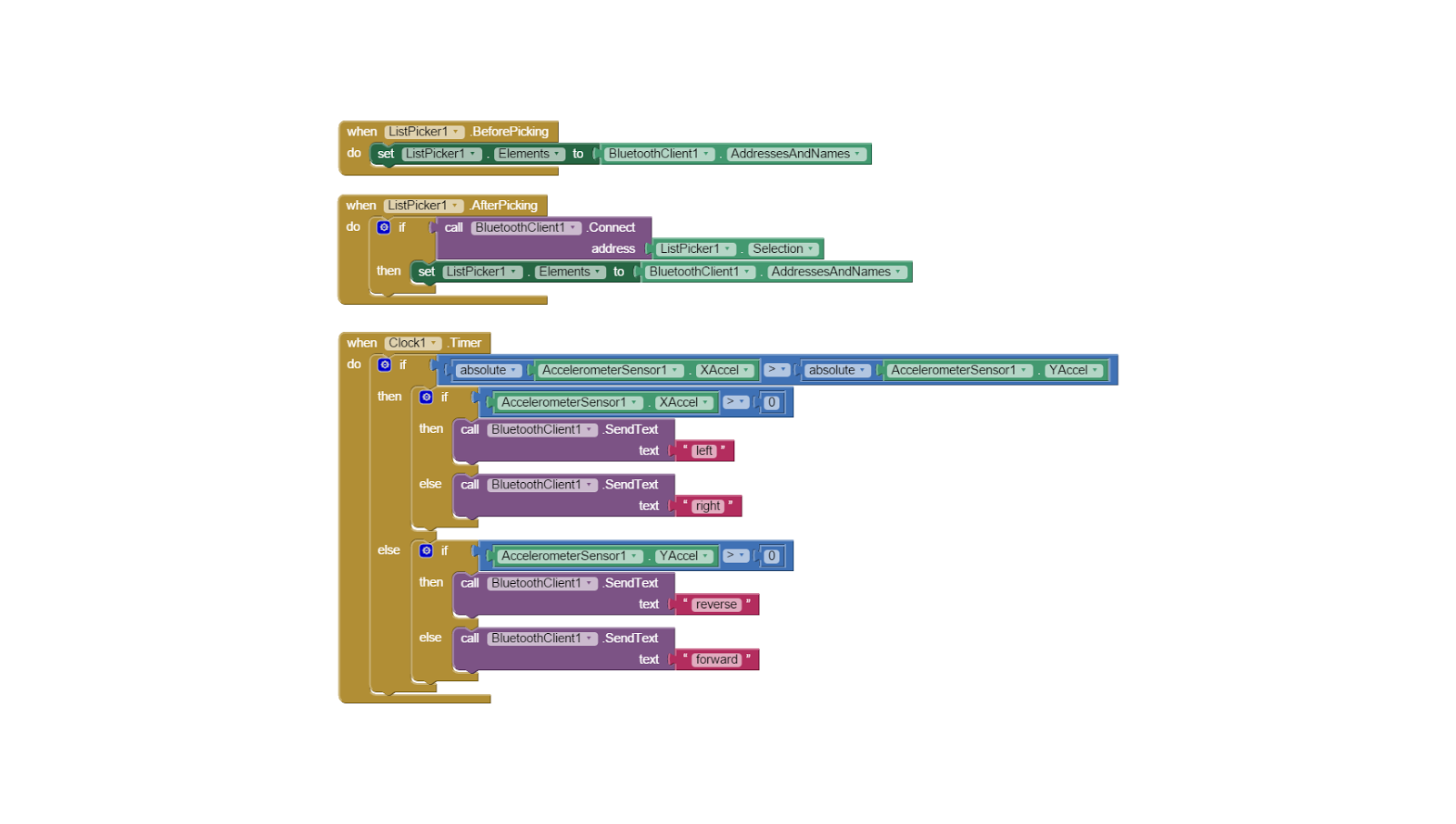
I wrote a code in App inventor 2 for controling this car with bluetooth, but I did not find the way to do it with the android acceleretor.
This is my arduino code:
#include <SoftwareSerial.h>
#include <AFMotor.h>
//creates two objects to control the terminal 1 and 2 of motor shield
AF_DCMotor motor1(1);
AF_DCMotor motor2(2);
SoftwareSerial BT(0, 1); //TX, RX respetively
String readdata;
int delayVal = 250;
void setup() {
BT.begin(9600);
Serial.begin(9600);
}
//-----------------------------------------------------------------------//
void loop() {
while (BT.available()){ //Check if there is an available byte to read
delay(10); //Delay added to make thing stable
char c = BT.read(); //Conduct a serial read
readdata += c; //build the string- "forward", "reverse", "left" and "right"
}
if (readdata.length() > 0) {
Serial.println(readdata);
if(readdata == "forward")
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
}
else if(readdata == "reverse")
{
motor1.setSpeed(255);
motor1.run(BACKWARD); //rotate the motor counterclockwise
motor2.setSpeed(255);
motor2.run(BACKWARD); //rotate the motor counterclockwise
}
else if (readdata == "right")
{
motor1.setSpeed(255); //Define maximum velocity
motor1.run(FORWARD); //rotate the motor clockwise
motor2.setSpeed(0);
motor2.run(RELEASE); //turn motor2 off
}
else if ( readdata == "left")
{
motor1.setSpeed(0);
motor1.run(RELEASE); //turn motor1 off
motor2.setSpeed(255); //Define maximum velocity
motor2.run(FORWARD); //rotate the motor clockwise
}
else if (readdata == "stop")
{
motor1.setSpeed(0);
motor1.run(RELEASE); //turn motor1 off
motor2.setSpeed(0);
motor2.run(RELEASE); //turn motor2 off
}
readdata="";}} //Reset the variable
Tnx
Raanan
Ghica
raanan arbel

I hope I am more clear now
Thanks a lot.....
Raanan
Ghica

raanan arbel
Ghica
raanan arbel
raanan arbel


Ghica
So, disable the timer before you send the stop.
You will need something to restart the car. What you could do is something like:
When canvas2 touched
If timer enabled = true
Then
set timer enabled false
Send stop
Else
Set timer enabled true
In this way you restart the car when you press canvas2 again.
I hope this helps. Cheers, Ghica.
raanan arbel

Ghica
It would be better to move the stop command into the then part, because now you also send a stop when you are restarting the car, which is not really ok, although you won't notice.
Cheers, Ghica.