High voltage/current board

Pablo Vila Ferrero
Since I discovered Mechaduino while looking about info of absolute encoders, for a BLDC servodrive I'm working on, I thought it was an awsome project. While the
hardest part is done (programming), it's a shame that the boards are so limited in power. I come from the world of DIY CNC machines and they usually need way more
powerfull steppers than NEMA 17 (although I have one that works with them but is very small), or low power NEMA 23, than 3D printers if you don't want be stalling the
Most people would think that the weakest point of this drive is the low amperage. Since torque is proportional to amperage, when people start loosing steps while they
rise the speed of theirs motors, they try to fight it by increasing the amps, but they sould be increasing the voltage. Happens that because of the high impedance of
the steppers motor, the back EMF limits the amount of current that the motors can get. For example I tried the other day to increase the voltage of my steppers drive
of my milling machine from 48V to 67V. I use NEMA 24 motors and I could get 3000mm/min in the headstock (around 60kg) at 48V, increasing it to 67V I could get it twice
So to improve more the performance I'm thinking on installing new drives based on the Mechaduino, but I will need a new power section. My goal is to make a discrete
MOSFET version, compatible with the Mechaduino software, encoder and Arduino Zero/SAMD21 MCU. In fact, I was working to get my software working with Arduino DUE but,
I have selected N-channel IRF740 MOSFET. They are high dV/dt, 400V, 10A MOSFETs. To drive the high side of the H-bridge with N-channel MOSFET I will use a couple of IR
2101 MOSFET drives per H-bridge. Also, to get the same kind of input that the A4954 drive has, I will use a couple of 2 input AND gates, that will mix the PWM signal
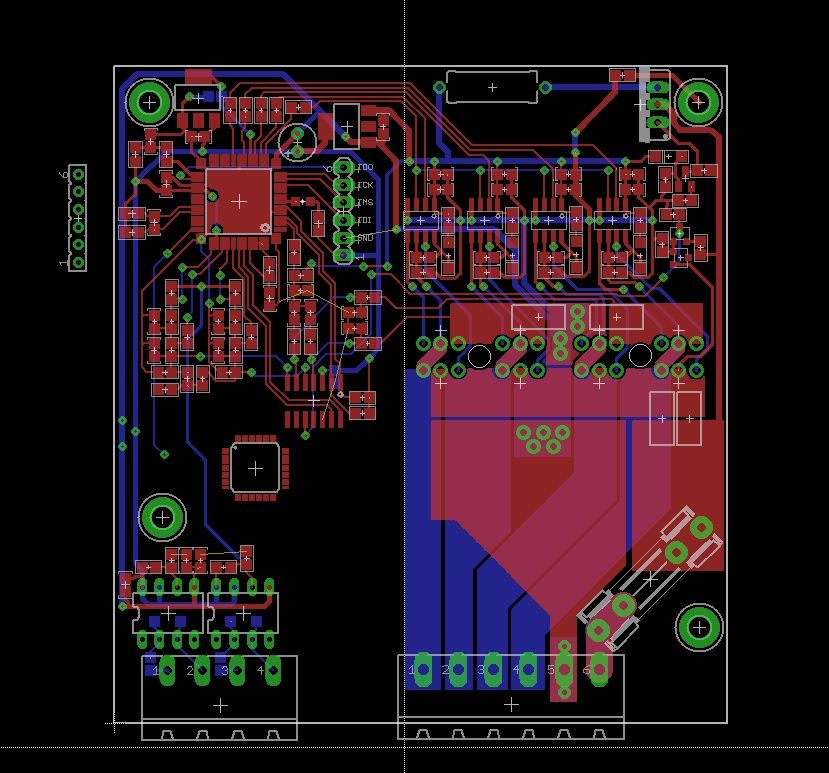
of each coil, with the signal that determines the direction of the current. This is the scheme of the H-bridge I'm working on (of course the drive will need two of

I'm not an expert on hardware or electronics so any help, advice, idea or recomendation on the design will be very apreciated!

Trampas Stern


The 3D model of the capacitors show 25V parts but I am using higher voltage rate caps with lower capacitance that are same form factor.
There are few changes from the Nano Zero Stepper (NEMA 17 board, www.misfittech.net):
1. The logic voltage is generated from the motor power supply, no need for external powering of the board.
2. The addition of enable pin, and all logic pins on the green connector has level shifting, even the UART pins.
3. 300Mhz cortex-M7 with hardware double precision floating point.
4. High Speed USB, not sure what to use for but someone will have an idea.
5. Of course high current with the ~10mOhm FETs, which should have little heating of board.
6. Support for 48V, not the 67V you would like but it is a start.
There are a lot of parts on this board and it is tough to even get the trace width wide enough to support 10A, much less heat sinks and trace and space to support 2oz copper.
Trampas Stern

Cristian Nicola
Trampas Stern

pa...@strotten.co.uk
Many thanks Paul
Trampas Stern

Ti Voi
Ti Voi

Trampas Stern
Ti Voi
Trampas Stern
Ti Voi
Trampas Stern
Ti Voi
Trampas Stern
Ti Voi
fast run
http://i1232.photobucket.com/albums/ff370/nhatsonelec/DSC_3583.jpg
slow run
http://i1232.photobucket.com/albums/ff370/nhatsonelec/Mobile%20Uploads/DSC_3586.jpg
Ti Voi
Trampas Stern

sup...@nhatsonelec.com
Ti Voi
Ti Voi
Ti Voi
Trampas Stern
Ti Voi
Ti Voi

Lamont Cranston

next step, i try replace as5047d by as5147p
Cristian Nicola
Ti Voi

Pablo Vila Ferrero
Pablo Vila Ferrero



{kind=link}
{kind=link}
{kind=link}
{kind=link}