Landing Target Protocol
197 views
Skip to first unread message

Meenakshi Sundaram
Apr 16, 2021, 1:24:51 PM4/16/21
to MAVLink
Hi,
I'm currently trying to do visual-based Precision landing in my custom-built drone with the camera facing downwards. I'm using fiducial markers(aruco tag).
I'm currently trying to do visual-based Precision landing in my custom-built drone with the camera facing downwards. I'm using fiducial markers(aruco tag).
I am trying to understand how Landing Target Protocol works and what exactly the LANDING_TARGET mavlink message holds.
https://mavlink.io/en/services/landing_target.html
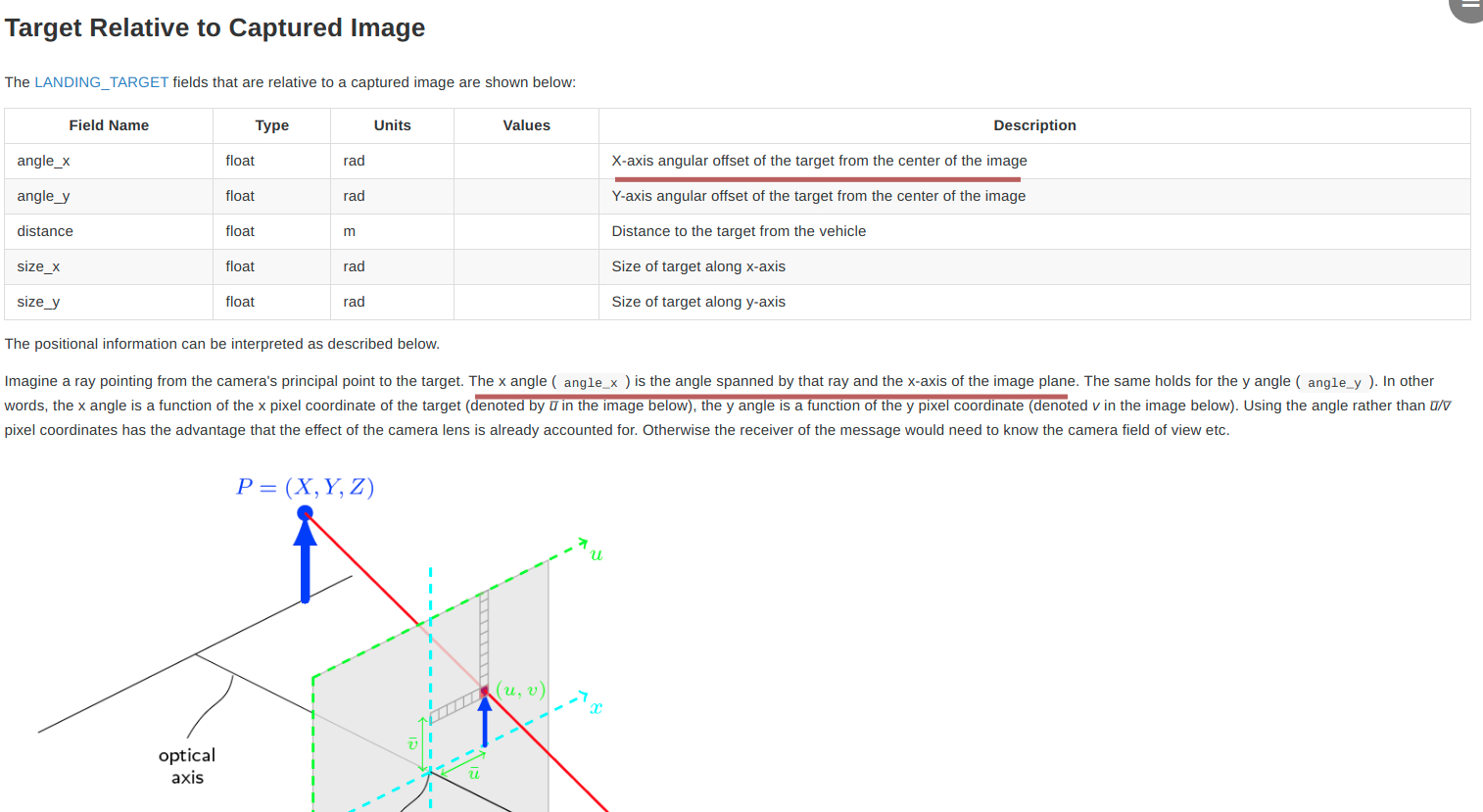
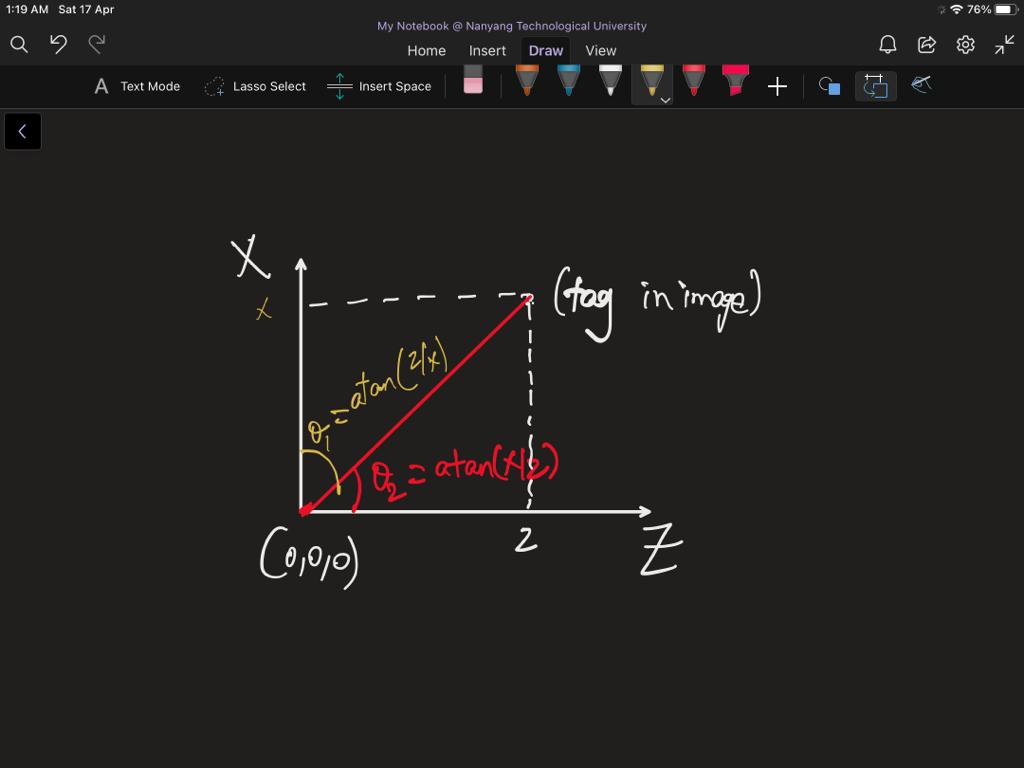
according to the table in the image attached with this conversation, the angle_x is the angular offset of the target from the center of the image which means its theta1 = atan(x/z) where x and z are the distance in m and denote how far away they are in x axis and z axis.
https://mavlink.io/en/services/landing_target.html
according to the table in the image attached with this conversation, the angle_x is the angular offset of the target from the center of the image which means its theta1 = atan(x/z) where x and z are the distance in m and denote how far away they are in x axis and z axis.
But the explanation below the table say its the angle spanned by the ray and the x-axis of the image plane which mathematically is theta1= atan(z/x) where the variables are the same as above.
As they both are denoting two different angles as shown in the attached image.
It would be really helpful to have some clarity on this.
Thank you in advance!
As they both are denoting two different angles as shown in the attached image.
It would be really helpful to have some clarity on this.
Thank you in advance!
{kind=link}
{kind=link}
Reply all
Reply to author
Forward
0 new messages