M2 HEATED ENCLOSURE CONCEPT - ideas and constructive criticisms requested

Tony Shulthise
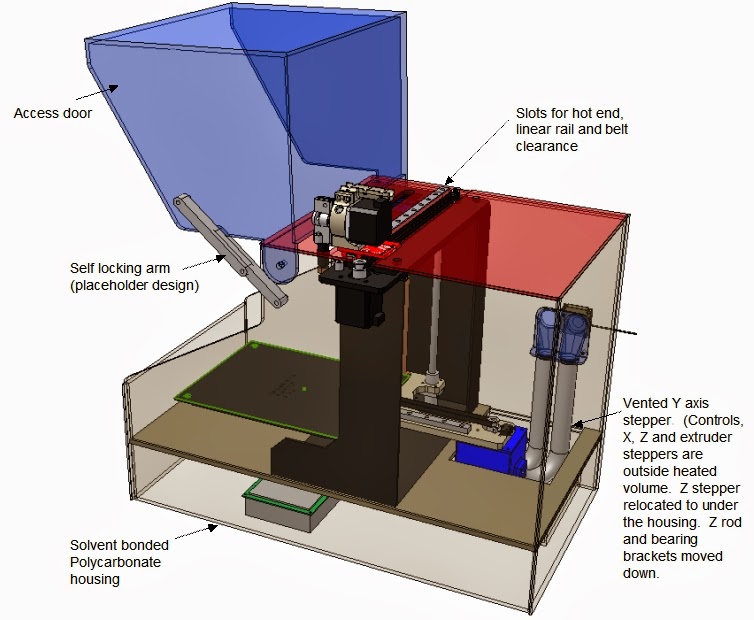
- The enclosure will be assembled by solvent bonding 1/4" smoked Polycarbonate. Poly or acrylic boxes are easy to make using a table saw and solvent bonding.
- The door will have a gravity latching arm to hold it up.
- I have the control electronics, X, Y and extruder steppers in the ambient environment so they won't overheat.
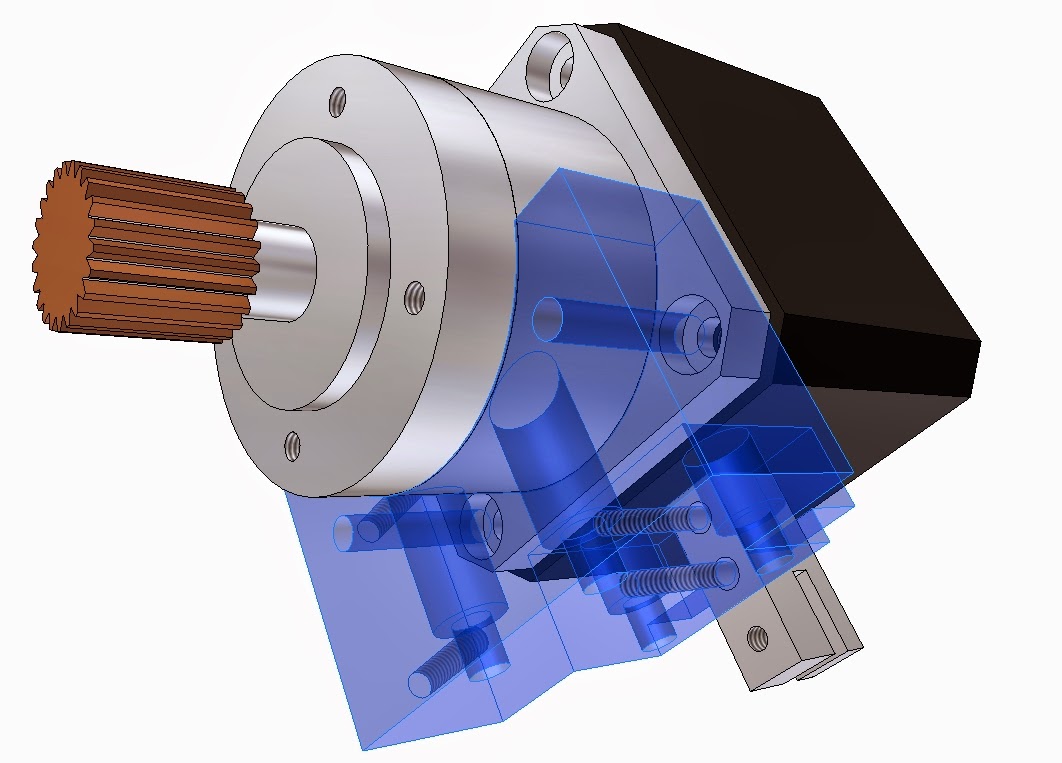
- I added a duct system with a 40 mm blower fan to keep the Y stepper cool. The Y stepper will be mounted in an printed enclosure.
- I moved the Z stepper to under the stainless frame and will machine a custom Delrin mounting plate for it and the guide rails.
- I moved the top guide rail bracket under the top of the stainless frame since the lead screw is too short to reach the original position
- I left a volume under the housing to mount the control card, a cooling fan, power supplies, an on/off switch.
- I'll mount the LCD control and lighted power switch on a side panel or on the access door
- I'll add a power plug socket for a computer power cord (rated for correct amps) to eliminate a bunch of power bricks and cords running everywhere.

jimc

Ed Nisley
I think the slot along the X axis will admit far too much cold air exactly where you don't want it: directly above the hottest layers of the printed object. The extruder motion will stir that air, so the temperature around the object will be much lower than the average temperature in the enclosure.
It looks like a step in the right direction: science!

Patrick Smith
Ed Nisley
Pulling 5 W from a stepper would require maybe 50 W of DC input power, plus a heatsink-and-fan on the hot side, so three motors would dump 180-odd W into the chamber. Ought to keep it nice & toasty-warm in there... [grin]
jimc

Theo McCormick
I've been printing in an enclosure with my M2 for some time. I did heat it with two light bulbs as an experiment. It sure helped the ABS warping. But I noticed the electrical wires got stiff and the motors ran hotter than usual. I decided to stop heating the enclosure until I could get the computer out and rewire some runs with high temp wire. Active cooling of the steppers is a great idea. From my testing I think you will see the anti warp benefits from heating the chamber starting at 45c...
Tony Shulthise
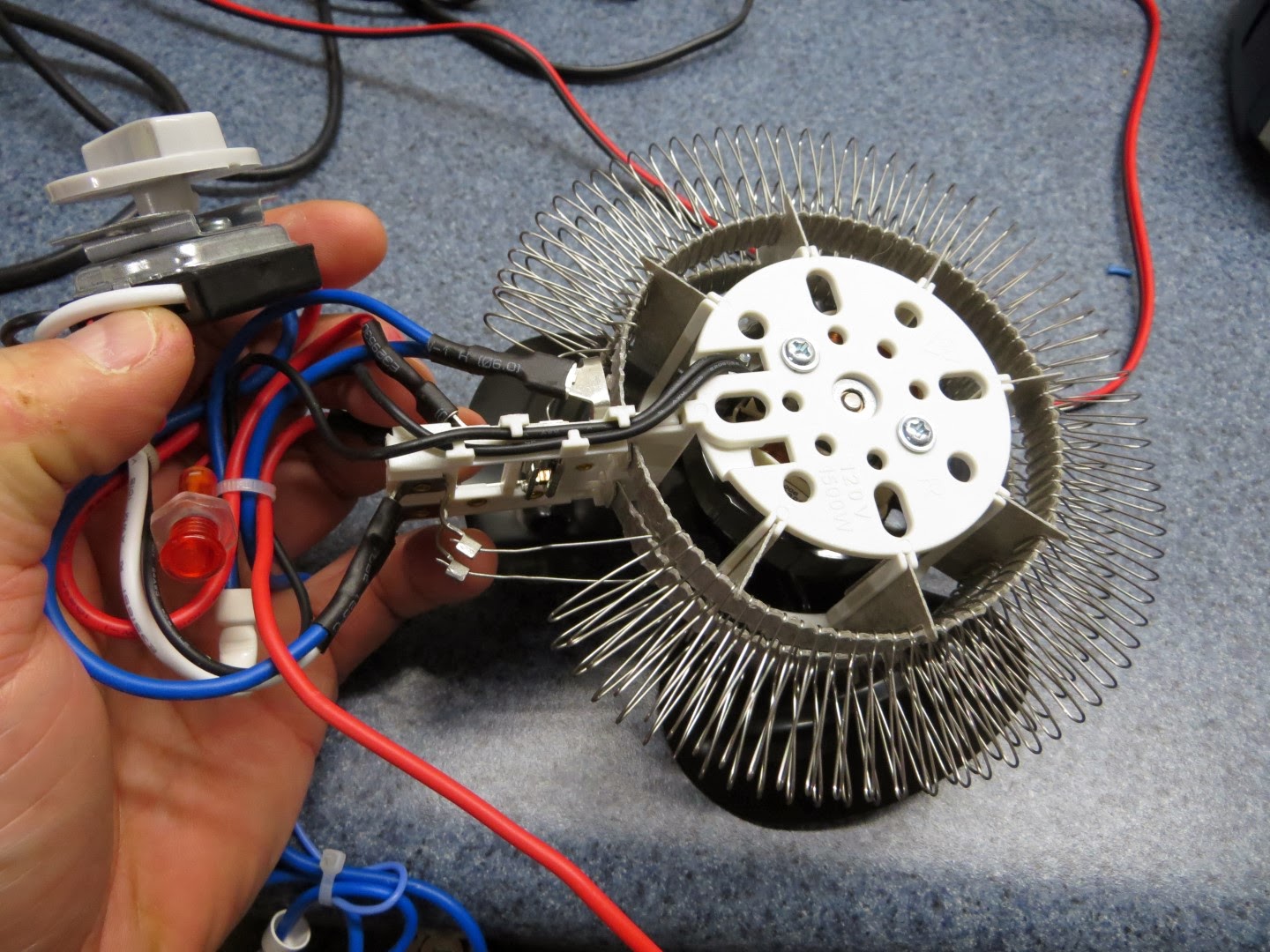
Heating - I bought a $5 toaster oven off Craig's list and took it apart. The toaster nichrome wires are too bulky and the thermostat is designed to work in the particular configuration of the toaster so I don't think that's going to work. So, I bought a cheap 12VDC window defroster and a cheap 500/1500 W 120VAC room heater that I'll play with to see which one gives me the best temp control. My guess is that if I can hold 80+/-10C I'll be fine. If not I can move to a PID control heating system which wouldn't be that expensive using an Arduino control. I hope the simple bang-bang on/off control I'm attempting will work good enough. I'm pretty sure I'll get what I'm looking for at 70-90C. A 500W setting on the cheap room heater I bought should be way more than enough to pull that off.
Wiring - Good point Theo! I'll start this way and if the wires get stiff I'll either run them in the exit cooling duct or I'll switch over to higher temp rated wires. The only wires that are in the heat are the Y axis stepper, Y axis limit switch, bed heater, and bed thermistor. My guess is the only wires of concern are the stepper and limit switch wires which would be very easy to replace with a higher temp spec wire.
Ed Nisley
http://softsolder.com/2013/03/12/stepper-motor-thermal-coefficient-vs-thermal-compound-and-forced-air/
You might want a bit of thermal insulation around the stator case, but the conductivity from air-to-case is so much less than case-to-water that it probably doesn't make much difference.
Using some flexy silicone tubing and a cable drag chain would be in order; letting the tubes flop around loose in the air can't possibly be a Good Thing.
Tony Shulthise
Tony Shulthise
Ed Nisley
Thanks...
Ed Nisley
Figure you're pulling 20 W from the motors, so allowing the water to rise 5 C = 5 K requires only 1 g/s = 1 cc/s = 1 gallon/hour. I think I have my units right: water is 4.1 J/gK, so it's (20 J/s)/(5 K * 4.1 J/gK) = 1 g/s and a gallon is 3800 cc, which is approximately 1 cc/s * 3600 s/h.
That ignores some heat transfer in the motors, but it's close enough for a first pass.
So a cubic foot of water is good for eight hours of printing: build a cubic foot box from your scrap polycarb, put a barb fitting in the bottom, fill it with cold water, and you're good for eight solid hours of printing without a pump. If you're fussy, build a sump, put a float switch in the top box, and keep it full; if the pump fails in mid-print, you're still good for another eight hours.
What's not to like?
jimc
Tony Shulthise
jimc

A. Elias
Ed Nisley
Remember that power ratings drop linearly as ambient temperature increases and there's a hard upper temperature limit. Makerbot ignored that in their MK5 extruder:
http://softsolder.com/2010/12/26/makerbot-thing-o-matic-mk5-extruder-resistor-abuse/
For an ambient temperature of 100 C, figure maybe 50% derating for a ceramic resistor: a 50 W resistor might dissipate no more than 25 W. Higher reliability = more derating, as always.
You have a spare build platform heater, yes? Epoxy a really big heatsink to the heated side, apply a fan, and you'll be in the right ballpark: large surface area, relatively low temperature differential, high airflow, rugged construction, decent connectors.
Marlin / RAMBo can handle two extruders, so I think you could gimmick up a second thermistor and manage the heater as a new "extruder". I'd use a DC-DC SSR to get the load current off the board, but that's in the nature of fine tuning...
Tony Shulthise

Theo McCormick
Ed Nisley
> want to have a 1000W converter
But the trouble with toaster ovens & similar resistive elements is that they run way too hot and require tremendous airflow to cool them. I'm not convinced a hot tornado around the build platform will produce Good Results.
jimc

Dale Reed
Tony Shulthise
Tony Shulthise
Ed Nisley
You could swap in an 80 A DC-DC SSR (for another $30) and a hulking DC power supply (for much more), but IMO this is one of the few cases where AC line power makes sense...
Tony Shulthise

A. Elias

quaverf
Tony Shulthise
I've decided to build the enclosure first then run tests to determine exactly how much heater power I will need. Once you get over 500 watts or so, the heater design gets tricky because the outlet temperatures get relatively high. I'll design my heater to use only the power needed to maintain 90C.
I'd say I'm 90% through the design plus any heater mods that come later. I'll keep you posted as I move forward.
Tony Shulthise
jimc
jimc
Tony Shulthise
If any of you guys have any insight regarding my 24V power supply question posted on Jan 9, I'd appreciate any insights you might have.
jimc
jimc
Tony Shulthise
The M2 Rails aren't rated for very high temps either. I'm changing my rails out for longer rails that are preloaded to take the small amount of wobble out. They are also rated for 100C operation. The longer rails give me 50% more print area (9.75" x 12.175") and almost 70% more print volume (9" Z travel with a couple other changes) without having to do much cutting on the OEM setup. I'm excited to finally be close to finishing the painful final details of the design.
A. Elias
Tony Shulthise
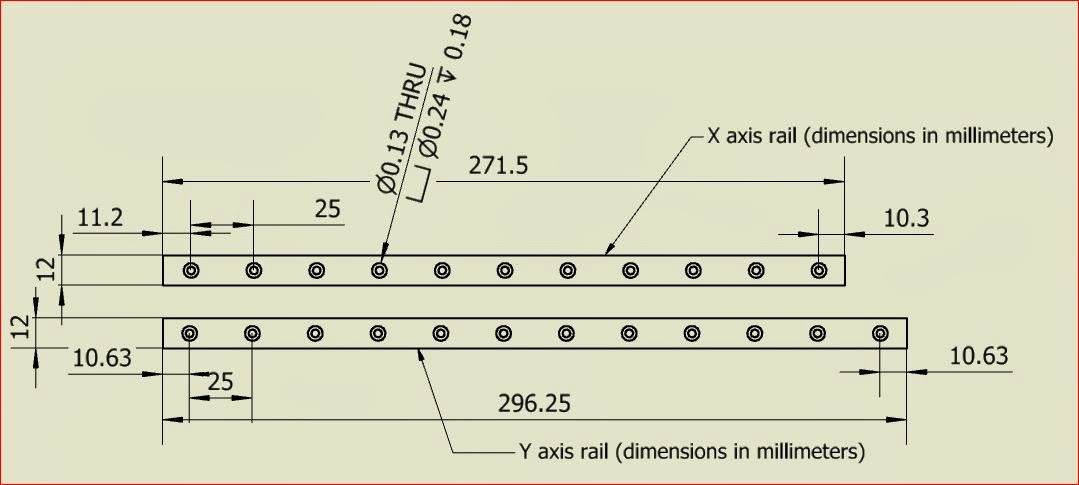
I noticed that the X axis M2 rail has been cut so one end sticks out a little further past the last hole than the other end. The OEM M2 rails are 296.25mm for the Y axis and 271.5 mm for the X axis. The 295 mm and 270 mm Misumi rails should be drop-in replacements. Check HERE for more info. WARNING... I haven't received the preloaded rails yet and I'm not sure how high the friction force is going to be. Its possible that the preloaded rails may have more friction than the M2 steppers can handle. Misumi lists some specs. for this but they are contradictory so I'll need to get the rails myself to be sure. I'll post results when they come. I hope to have them here to test within the next week.
I'll be glad to answer any questions I can to help you out.

est1983gmail
Tony Shulthise
Tony Shulthise
They also don't have any noticeable static friction and the moving friction is very low even with the preloaded bearings. I measured around 45 grams moving force with the rubber wipers in place and around half that much without the wipers. That force is a function of speed however. Part of the force is due to the thicker high temperature grease (100C rating) which will thin out a little at higher temps. Even if it didn't there is no noticeable sticking on startup which is all that I was concerned about. I'm very pleased that they have such low force even with the preloaded bearings. It should make for a much stiffer, super precise setup.
jimc

Gregg Bone
Tony Shulthise
est1983gmail
On Friday, January 31, 2014 6:12:53 AM UTC+1, Tony Shulthise wrote:
est1983gmail
Tony Shulthise
Remember that the part number I listed is a longer travel than stock which requires some mods to work. You could also replace the stock M2 guides with ones near the same size. The stock Y rail is longer than the X rail.
Stiffening up the bed mount is probably the first thing to work on before replacing the linear guides since there's more compliance there than in the guides.
jimc
tony, do me a favor and double check me here...so if i understand misumi's part # system right then the correct "Y" replacement rail according to your measurements would be SSEBT13-295?
Tony Shulthise
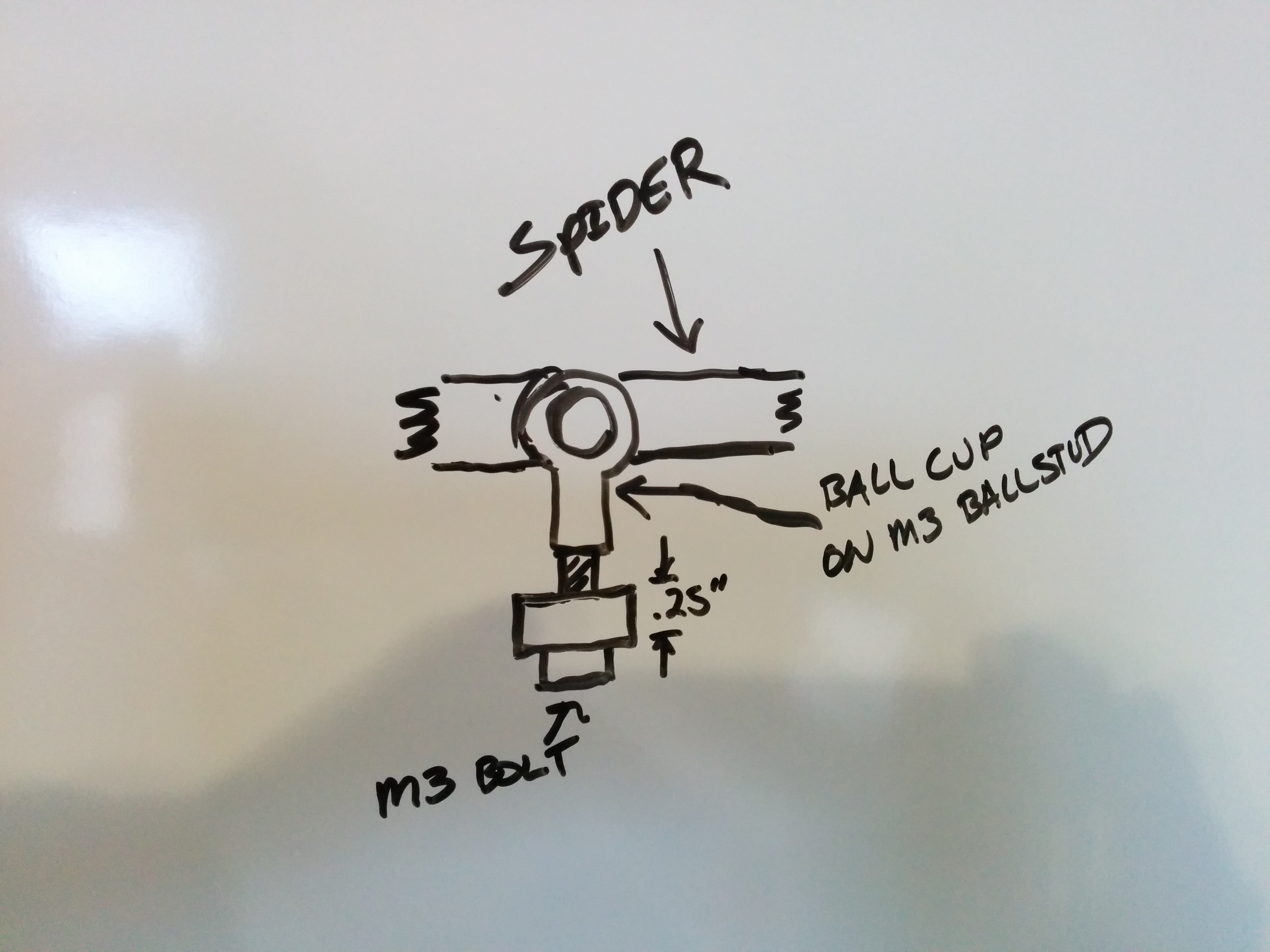
The stock M2 X and Y rails are different lengths and the X rail has one end cut. I'll attach a diagram showing what I measured and modeled. Keep in mind, the picture below shows what I measured from my printer parts with calipers. These are not super precise measurements. If you go to the Misumi PN I posted earlier you will get exact dimensions for things like the rail profile, overall height, exact hole and counter bore dimensions, etc...
jimc
Tony Shulthise
Tony Shulthise
The stock M2 guide doesn't have a wiper so removing this wiper should not decrease the longevity or performance for the M2. I suggest not printing in a very dirty or really dusty environment. Covering the X rail with something when you aren't printing will keep typical ambient dust from accumulating in the bearing grease over time.

Robert Silvers
Tony Shulthise
Tony Shulthise
Ed Nisley
It's really hard to make a good, cheap kinematic mount with four sliding bushings. A mount with two sliding bushings and a rolling rotation control seems better, but it looks tacky... and that counts for a lot.
Somebody showed me a hulking printer with a platform with (what looked like) sliders on four vertical rods at the corners and driven by two leadscrews on the long sides. It wasn't obvious how they built a kinematic mount with all those constraints; there weren't any visible adjustments and they didn't tout how they pulled it off.
> Bed mounting plate and spider deflections
With my modified silicone-pad platform mounts, I see about ±5 mils = ±0.125 mm of slop parallel to the X axis when pushing not-too-hard on the edge of the platform, which isn't enough to worry about. In any event, there's no way to impose offset forces on the platform in the XY plane during normal operation.
There's less than that in the Z direction, again at the end of the plate with gentle pressure, which would be maybe half of a 0.20 mm layer thickness; I've never seen imperfections that large in the tops of extruded threads. Those forces would come from the offset between the platform center-of-mass and the Y-axis linear bearing, which has the lowest acceleration of the three.
The stock spring-mounted platform, on the other hand, will have far more slop due entirely to the wobbly screws and spring loading, even with those low forces. All bets are off in that case!
I've been bringing my old Thing-O-Matic back to life with a new controller and, wow, I'd forgotten how non-rigid that thing was... [grin]
Tony Shulthise

Curtis Menard
--
You received this message because you are subscribed to the Google Groups "MakerGear - Make Today, Change Tomorrow" group.
To unsubscribe from this group and stop receiving emails from it, send an email to makergear+...@googlegroups.com.
For more options, visit https://groups.google.com/groups/opt_out.

Bryan Boettcher
A. Elias
Bryan Boettcher
A. Elias
Ed Nisley
And, yeah, I've made quite a few original mistakes along the way... [grin]
Tony Shulthise
IMO, anything that increases stiffness is good unless it creates a resonant frequency that's close to some normal operation frequency somehow.
As far as the play in the linear guides, lowering the acceleration will help but I can't imagine that it would take the ghosting away totally. Can you post some before/after pics showing prints and the associated acceleration settings?
Tony Shulthise

jimc
Tony Shulthise

Jin Choi
Jim Caruso
--
You received this message because you are subscribed to a topic in the Google Groups "MakerGear - Make Today, Change Tomorrow" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/makergear/Jj9kOsaedF0/unsubscribe.
To unsubscribe from this group and all its topics, send an email to makergear+...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
Tony Shulthise
Tony Shulthise

Tony Shulthise
- Accomplished using the stock M2 frame with a few mods.
- Using stock Z axis bearing system, motors and controls
- Longer travel preloaded high precision grade X Y bearings, used Y axis belt on X axis.
- Surprisingly, the preloaded precision grade bearings still have some "slop". A little less than the stock M2 bearings.
- Digital closed loop temperature controller
- Polycarbonate housing. All electronics relocated outside heated volume, under the printer except Y stepper.
- Ventilated enclosure system to cool the Y stepper
- External resettable circuit breaker
- Housing mounted USB connector
- Updated to 24 VDC power supply and hot end
- Custom angled LCD control panel enclosure mounted to the front of the housing
- Added lighted rocker switches for 110 VAC power, 110 VAC heater, 24 VDC LED lighting, and 24 VDC Aux to front panel
- Simplified, lower (production) cost aluminum mounting frame
- Hard mounted the bed frame to the Y axis guide block
- My assumption is that this system will be precise enough to allow change outs of the build plate and glass plate without requiring re-leveling. I haven't tested that assumption yet. I just finished machining these mods last night.
- Two point leveling. Rear adjustment remains fixed.
- Procedure...
- Home Z
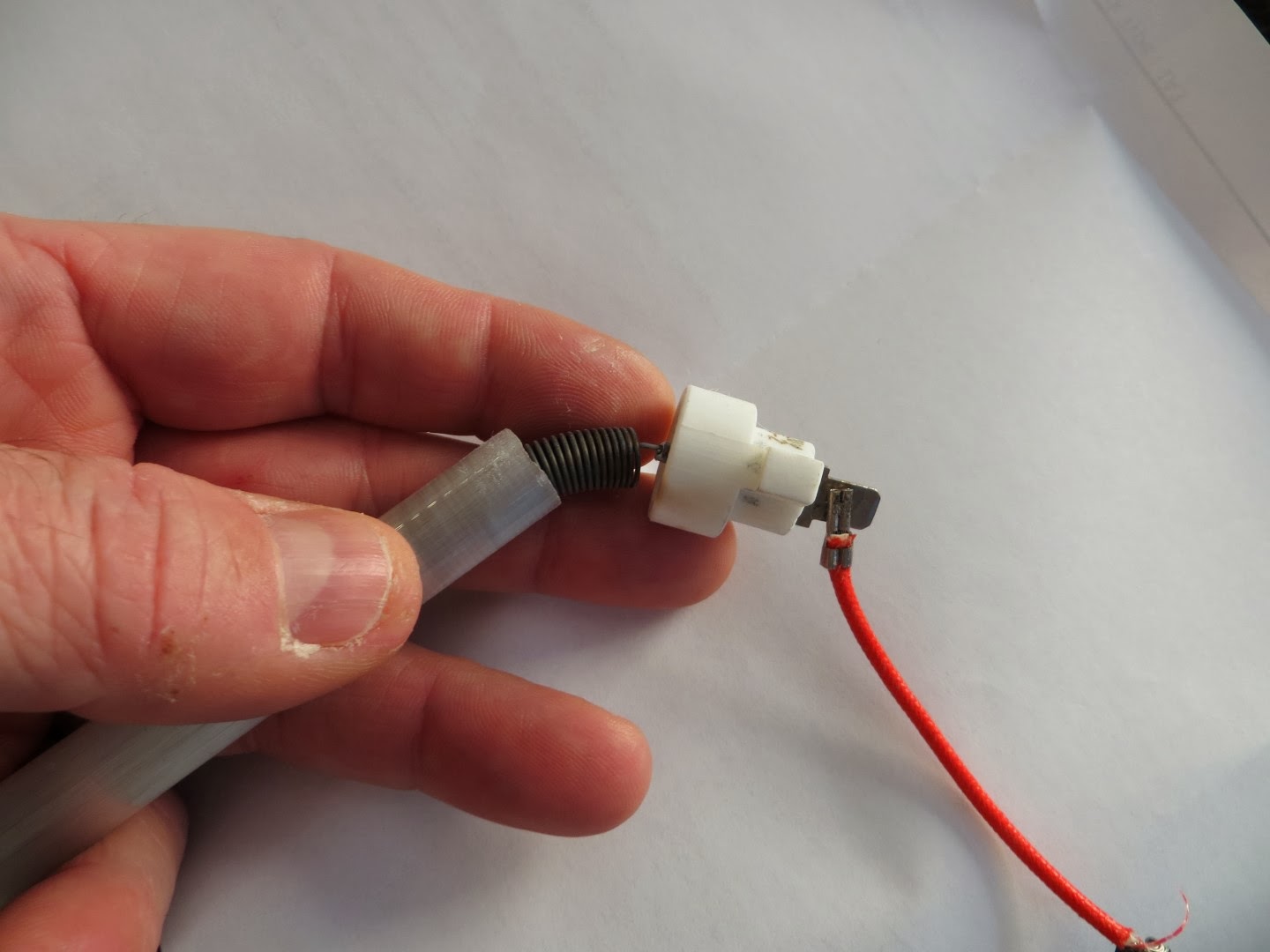
- The redesigned z offset switch touches the glass bed over the rear mounting point and a light comes on.
- Move the bed until the left front adjuster is directly under the z switch
- Adjust left adjuster knob until the light comes on
- Repeat for the right side
- Repeat process to double check and fine tune left and right adjustments.
- Z offset and bed leveling complete
- 24 VDC 1000 lumen light strip
- The on/off witch is mounted on the front of the housing
- Simpler, stiffer mount design
- Finish design, fab and install z switch actuator/switch assy that uses the bed to set the z-offset automatically.
- Update S3D scripts and possibly firmware as reqd.
- Design a blower mount to pass air across the extruder
- Design a blower mount to pass air past the heat zipper to cool PLA parts
- Make part blower mount removable and use same mounts to attach a dial indicator to test level and plumb
- Fab and install blowers/ducts
- Test
- Build prototype that will diffuse the air and heat enough to keep all exposed surfaces under 250F. Getting closer.
- Integrate prototype concept into housing which has been scarred to accept the system
- Test to ensure the Y stepper stays cool enough, the internal temp is controllable within +/-10F without excessive surface temps.
- Test heat "zipper" that will minimize heat loss around the hot end
- Test to understand how heated volume affects hot end control, belt tension, and printing characteristics for various filaments. Especially interested to see if this makes printing larger objects with ABS and Flex filaments less problematic.

Haasen
Tony Shulthise
Michael Haas
--
You received this message because you are subscribed to a topic in the Google Groups "MakerGear - Make Today, Change Tomorrow" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/makergear/Jj9kOsaedF0/unsubscribe.
To unsubscribe from this group and all its topics, send an email to makergear+...@googlegroups.com.
For more options, visit https://groups.google.com/d/optout.
😊
Tony Shulthise
Michael Haas
Tony Shulthise
How well does your dual extruder setup work? Is it much trouble to get set up and going?
Michael Haas

{kind=link}
Dusty
https://www.youtube.com/watch?v=Ym7PK_hCkrY&list=UU06I1KGddyf1484umnuwRWQ
Regards

jimc
thats nice. so in your vid it says you overheated the stepper motors. how hot does it get inside the enclosure? what was happening that tipped you off that the steppers were overheating?
jimc
Jin Choi
Tony Shulthise
Dusty
Ikea Parts
BESTÅ VARA Glass door
http://www.ikea.com/us/en/catalog/products/20253874/#/40178586
STUVA Frame, white
http://www.ikea.com/us/en/catalog/products/30128177/
DIODER LED 4-piece light strip set
http://www.ikea.com/us/en/catalog/products/20119418/
Also the kickstarter Tony is talking about is https://www.kickstarter.com/projects/1045344246/maker-kase-universal-printer-cabinet and it was $250 ($300 shipped) and the dimensions are 24” Wide x 22” High x 22” Deep. My case is 22 1/4” Wide x 22 3/4” High x 18 3/4” Deep.
The only motor that is getting hot to the touch is the extruder motor so I am going to print http://www.thingiverse.com/thing:254514, since I do not use the 50mm fan.
I am not planing on adding a heater at the moment.
Tony Shulthise
Tony Shulthise

- The longer X, Y and Z travel works great. I still need to install a larger glass build plate to take advantage of all the extra volume (60% larger build area!)
- I printed a 0.3" tall by 6" long part on glass with leftover hairspray at around 75C and it stayed in place without lifting. Once I get all the little tasks on my growing to-do list finished I'll try to print a very large and tall ABS part to see what happens.
- 400 watts gets the inside up to around 85C when using a 100C setting for the heated bed. I just put a small hair dryer inside set on low. Its not connected to temperature controller yet but the temperature held very steady once it reached equilibrium.
- The Y stepper motor runs about 10C above the surrounding air temp so I'm going to skip enclosing it with outside ventilation for now. If it fails then its not very expensive to replace it and add the enclosure later.
- I love having a lighted power switch and a switch to turn on internal LED lights on the front of the housing
- At 85C build volume temperature, the air in the electronics housing has not exceeded 120F. That should be fine since I have good air circulation going by the Z stepper and the power supply and RaMBO board.
- My new magnetic bed system doesn't provide any better repeatability than the stock M2 system. Needs tweaks since I still have to level the bed frequently.
- The blocks I made to hold the X and Y axes to the belts need to be made from steel vs. Polycarbonate. They are very small to maximize travel so they need stronger threads.
- The y axis cable track works great but I think it my be catching somewhere very infrequently. Still troubleshooting that one.
- The preloaded high precision Misumi linear guides have the same amount of "slop" as the original M2 guides. I don't think linear guides are a good choice unless 3 or more on 2 different rails are used.
- The enclosed system is just as noisy as the original. I had hoped it would muffle most of the noise. The housing muffles the electronics but amplifies other sounds. The blower in the electronics enclosure is pretty noisy too. I need to isolate it. I think I can get the noise down quite a bit with just a little focused effort.
- I'm using just one fan for the extruder and parts right now. For ABS I rotate it so that it blows horizontal across the hot end only. For PLA I rotate it to about 45 degrees to that it blows on the hot end and the part. So far that seems to work very well but I eventually want to have independent fans so that will come later.
Bryan Boettcher
--
You received this message because you are subscribed to the Google Groups "MakerGear - Make Today, Change Tomorrow" group.
To unsubscribe from this group and stop receiving emails from it, send an email to makergear+...@googlegroups.com.
Tony Shulthise
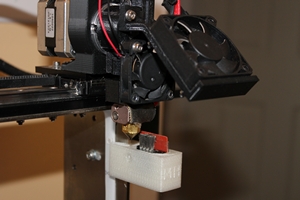
The clamp will be replaced with a desiccated box to hold filament soon. Its been so long since I've printed anything I just wanted to make sure I could ;-) Its coming together one little step at a time... Only 273 more steps to go...
Robert Silvers
Can you really put an Ikea door on each side? It would seem that would destroy the structural integrity of the box to have two sides with no support. I guess I could use glue and make it stronger. But if the STUVA is large enough with one door, please let me know.
Dusty
I do believe you can put a door on both side and yes that would hurt the structural integrity of the box, I would suggest not putting 100lb on top of your enclosure.
I have not had the inspiration to work on my printer so nothing really has changed yet. But when I worked on my prusa I did mess with the stepper controller to cool them, I have not look into it on the RAMBO board yet. That is a good idea.