Bernheim Connect custom R.O.V. project details and overview
26 views
Skip to first unread message

Jon Clark
Jun 29, 2012, 3:18:47 PM6/29/12
to lv...@googlegroups.com
A while back I had mentioned that I was going to try to bring our R.O.V. to Bernheim Connect and have it swimming around in the lake and feeding the video back to the projector. Although I am still planning on doing this, I just didn't feel like bringing a commercial R.O.V. to something like Bernheim was all that interesting, so.... I have started working on a separate R.O.V. project that is coming together nicely and I thought I would share some of the details and hopefully spark some ideas on other projects, or any suggestions for this one. So first a little background.
A few months ago Chris C. forwarded me an email from the guys at Bernheim that had a topographic map containing depth "guesstimates" (which they said was the most topographic info they had on the lake). Right then I know what I wanted to for Bernheim Connect... Create an Autonomous ROV from scratch, that could navigate the lake, gather information about the lakes bed, and then create a new topographic map of the lake, as well as a 3D interactive model of the lake floor, with real data and not "guesstimates".
As of today, I've completed the basics:
- build of the basic R.O.V. structure
- GPS plotting and auto navigation
- manual navigation from android phone with touch slider mode and accelerometer mode
- depth sounding
- waypoint mapping
- 3D modeling
- live visualization
I'll be posting a bit more of a detailed overview of the different parts of the project a little later but here's some basic details:
ROV Body:
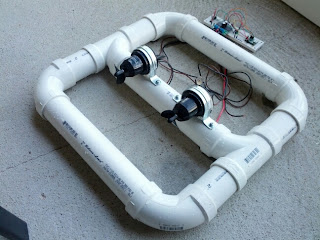
This is a picture of the start of the ROV body construction. (Yes, it's extremely simple yet works amazingly). It's being changed around a bit now to add in all the electronics but this is the basic concept. The thrusters are nothing more then Bilge Pump cartridges and the props are actually ones that you would use for a toy RC boat. There is now a third motor that mounts vertically to give the ROV the ability to dive down to depths as far as 300'. The motors are being moved to the back of the frame and the front will now hold the Depthsensor. As far as a plain jane ROV is concerned, this ended up performing way above my expectations and cost less then $50!
Electronics:
- Arduino Mega
- Temp, Humidity, Pressure Sensor
- Ultimate GPS Module from Adafruit
- Sparkfun Bluetooth shield
- Pololu 36 amp Dual motor controller
- Garmin Intelliducer (Depth Sensor, can detect depths as far as 1000')
- SD Shield
- Laptop
The ROV can either work in a stand-alone mode by reading and saving data to an SD card, or it can operate in live mode getting it's instructions from a tethered laptop.
All the software for mapping a missions coordinates, navigating the ROV, and communicating data was written as arduino code or using AutoIT for windows. (Would love to get the local side software converted into something that could run on say.... a rasberry pi!
Here's what the maps and 3D models look like:



If anyone's interested in helping out with the project just let me know. Also considering the fact that it's around $50 to create a simple ROV capable of gliding around the lake, I'm curious to hear some other peoples ideas for lake floating projects.

Nathan Armentrout
Jun 29, 2012, 3:27:15 PM6/29/12
to lv...@googlegroups.com
A while ago I was inspired to design an autonomous ROV that picked up surface debris to clean the oceans. The AROVs would deposit their loads to an autonomous barge to be processed on land. I might be interested in trying to add the garbage collection outfit to the ROV. My design involves a small conveyor system to pick garbage off the water. Camera guidance might be helpful to identify things to pick up.

Lockadoc
Jun 29, 2012, 5:00:09 PM6/29/12
to lv...@googlegroups.com, lv...@googlegroups.com
I am very interested in your work on this project
I will not be able to add any expertise to it , but would
Like to try to suck up most of your knowledge on it.
Bill S
Sent from my iPhone
Pat McCarthy
Jun 29, 2012, 5:05:54 PM6/29/12
to lv...@googlegroups.com
Can I help?
Need Offensive Weaponry?
The information transmitted is intended only for the person or entity to which it is addressed and may contain CONFIDENTIAL material. If you receive this material/information in error, please contact the sender and delete or destroy the material/information.
Jonathan Clark
Jun 29, 2012, 5:08:18 PM6/29/12
to lv...@googlegroups.com
Pat,
1. Of course.
2. Always.
I don't think those two answers will ever change regardless of the context. :)

Tim Miller
Jun 29, 2012, 5:23:26 PM6/29/12
to lv...@googlegroups.com
a shark fin.... for stability
Jonathan Clark
Jun 29, 2012, 5:25:00 PM6/29/12
to lv...@googlegroups.com
SharkFin added and moved to top of priority list, good call tim.

Barton Chittenden
Jun 30, 2012, 9:42:06 AM6/30/12
to lv...@googlegroups.com
Best. Answer. Ever.
Reply all
Reply to author
Forward
0 new messages