airborne Velodyne HDL 32 (with bad GPS/IMU trajectory)

Martin Isenburg
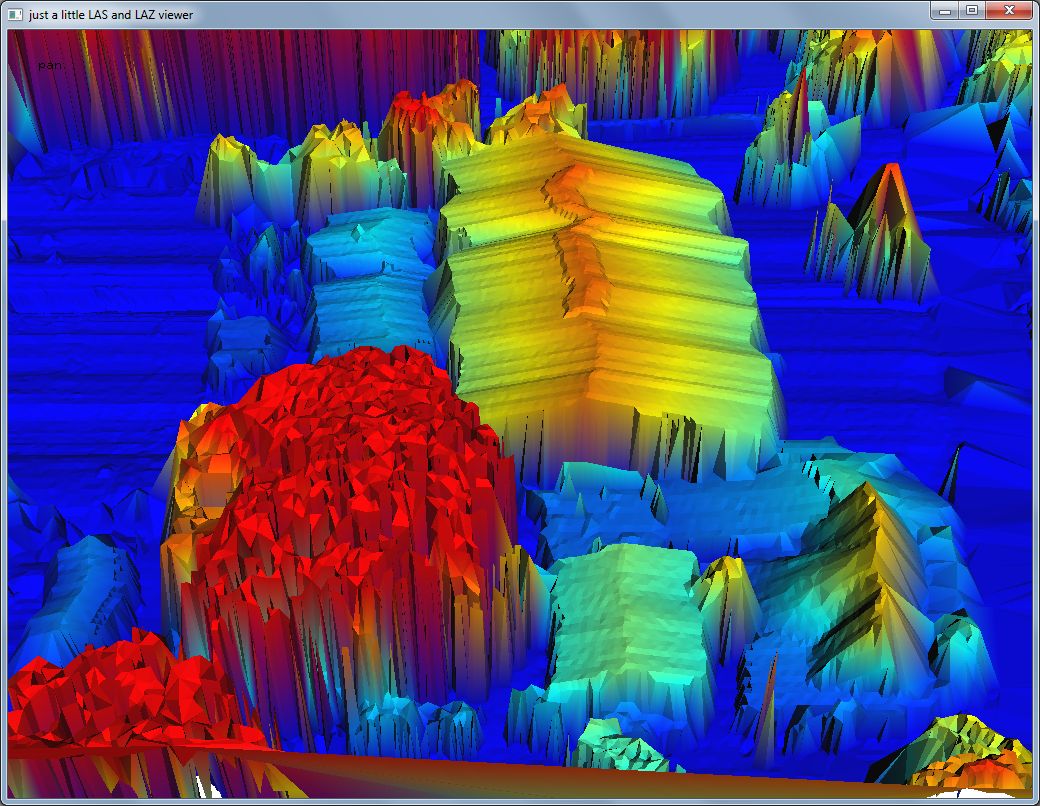
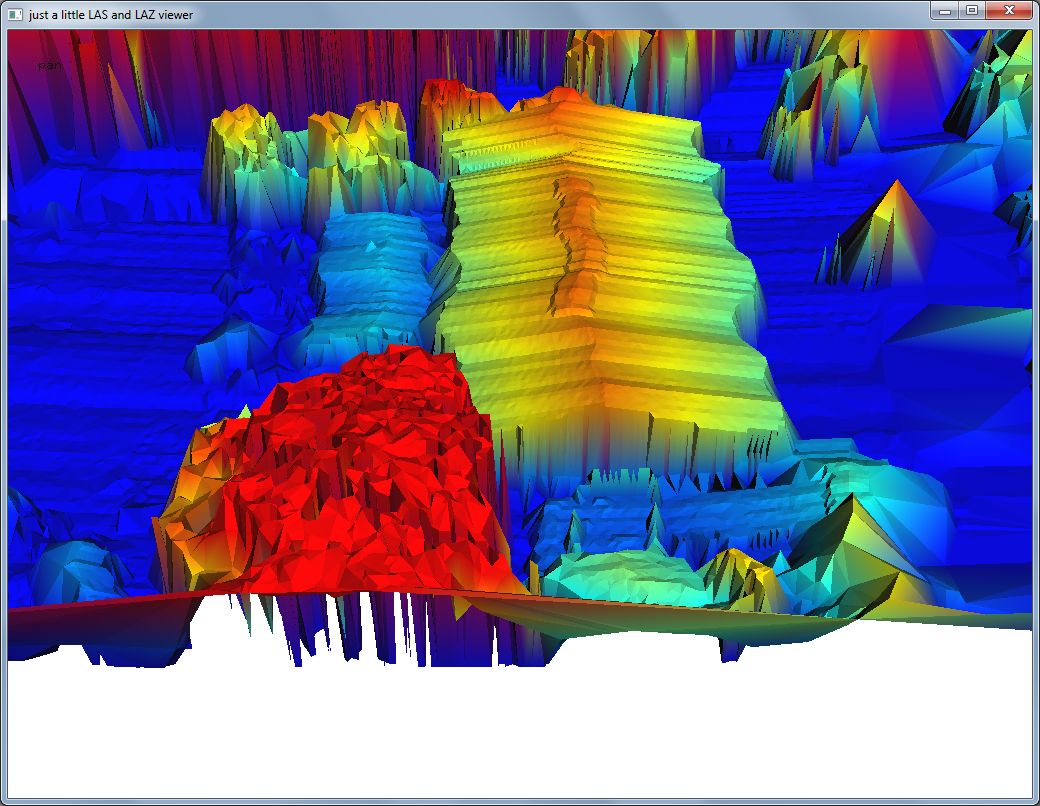
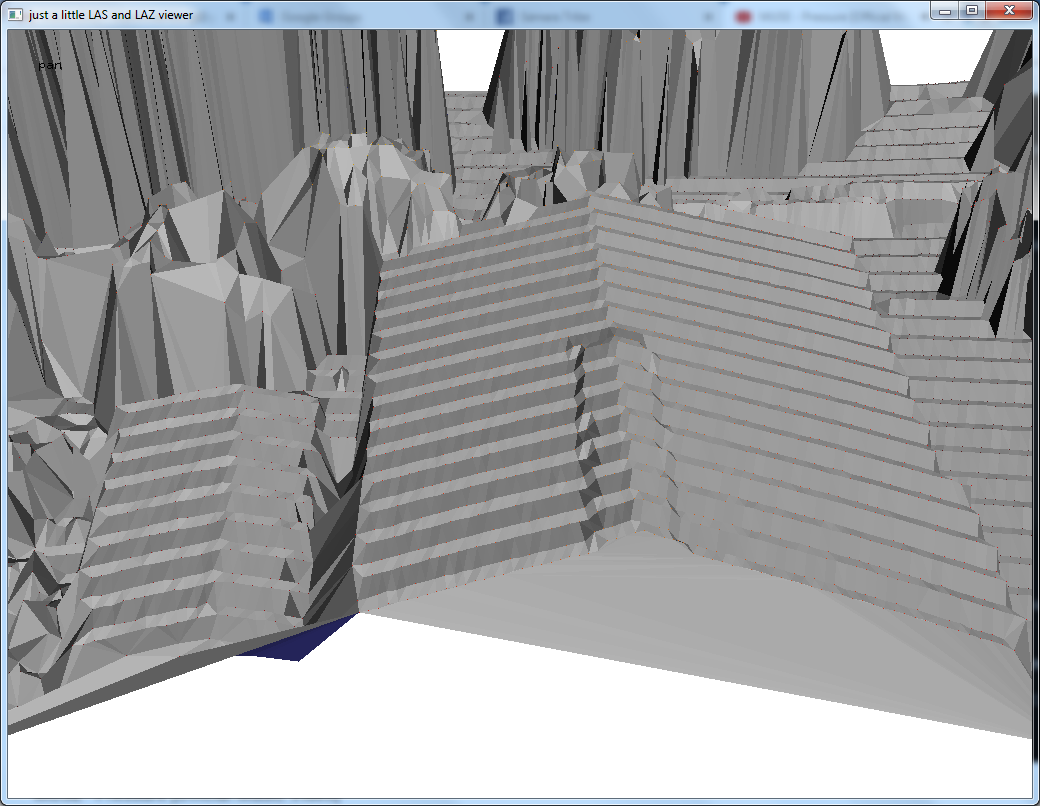
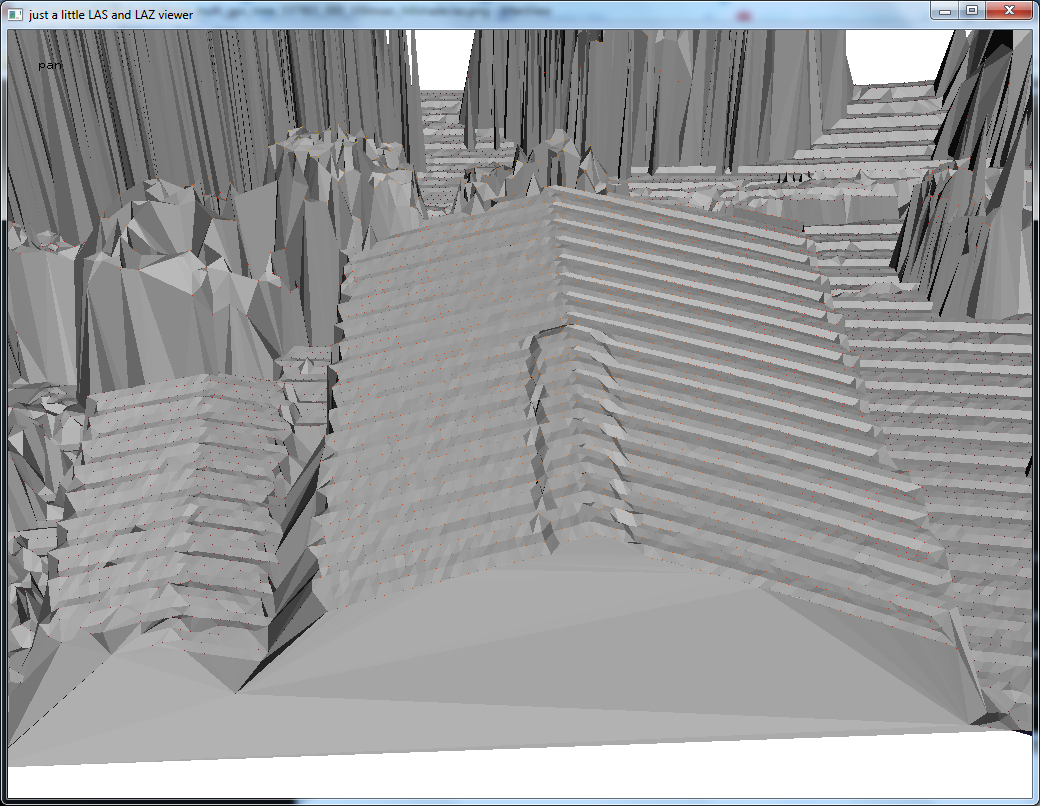
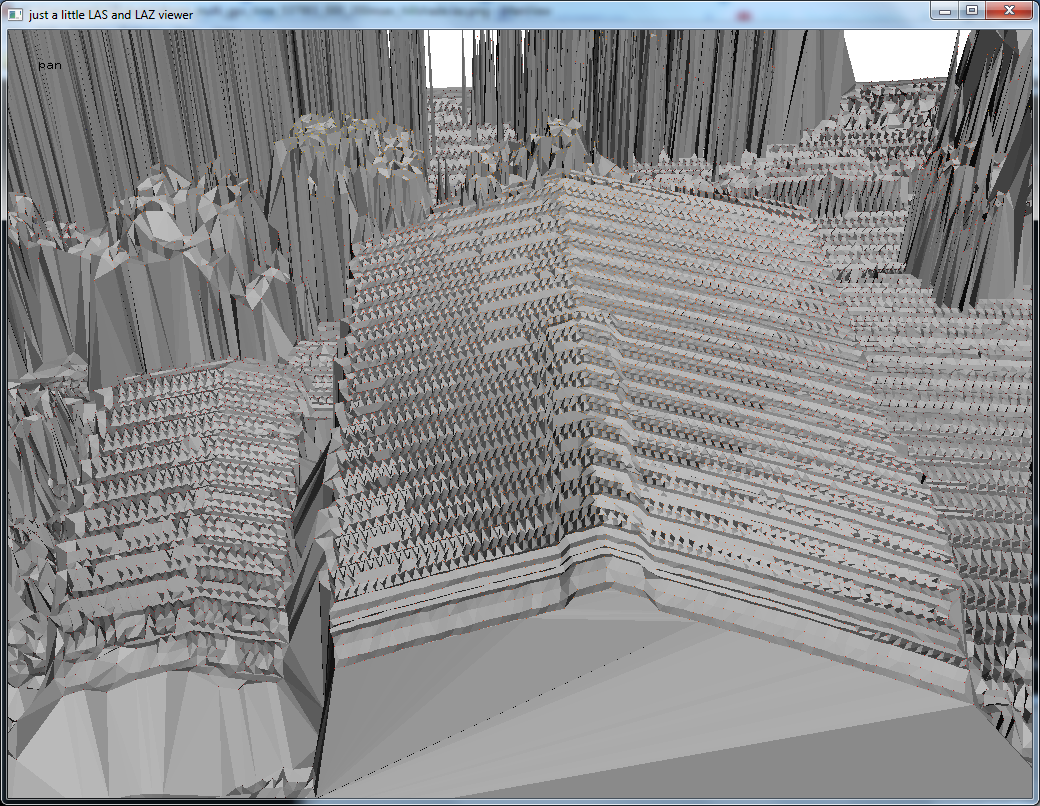
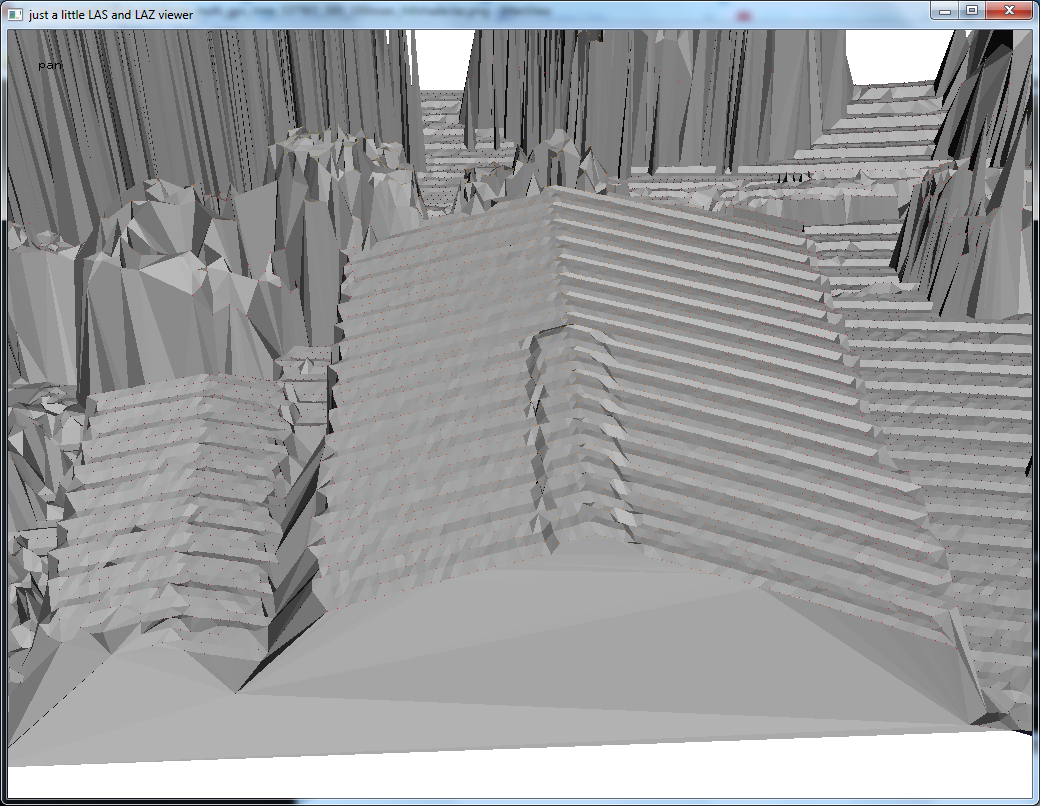
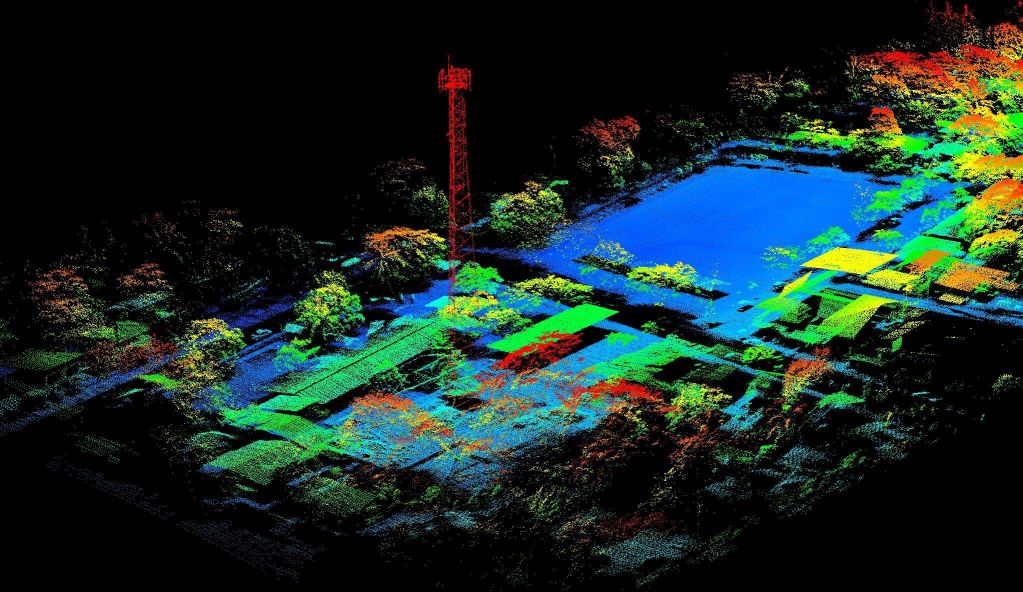
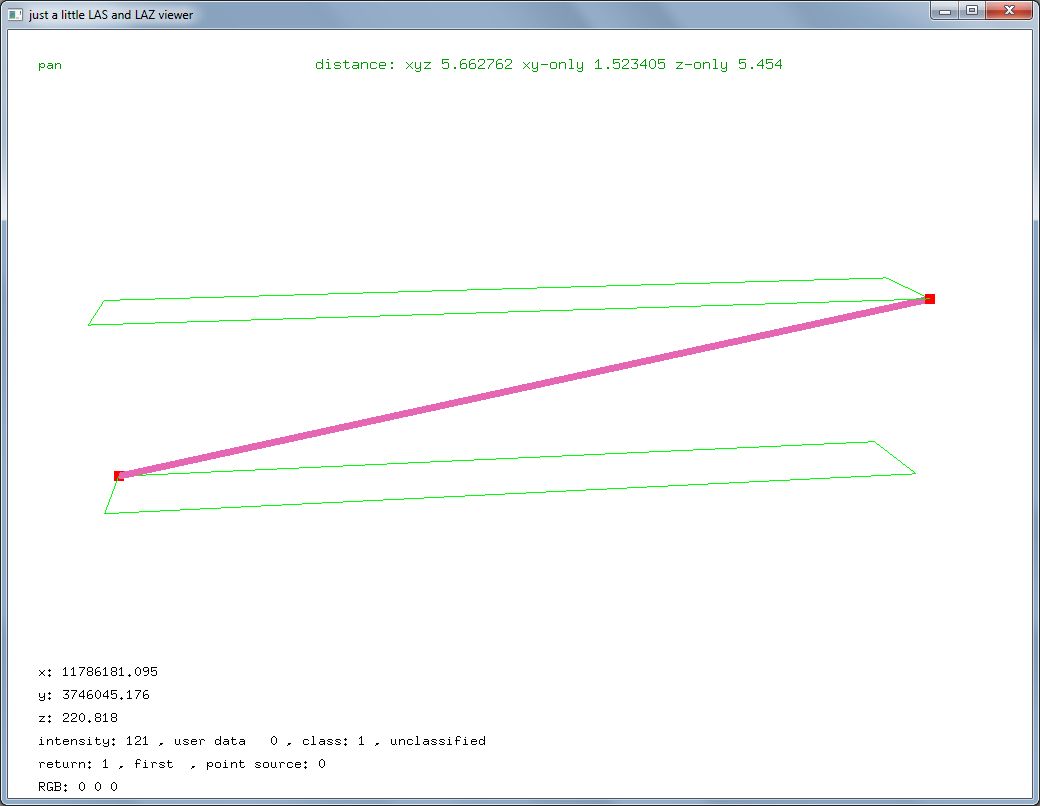
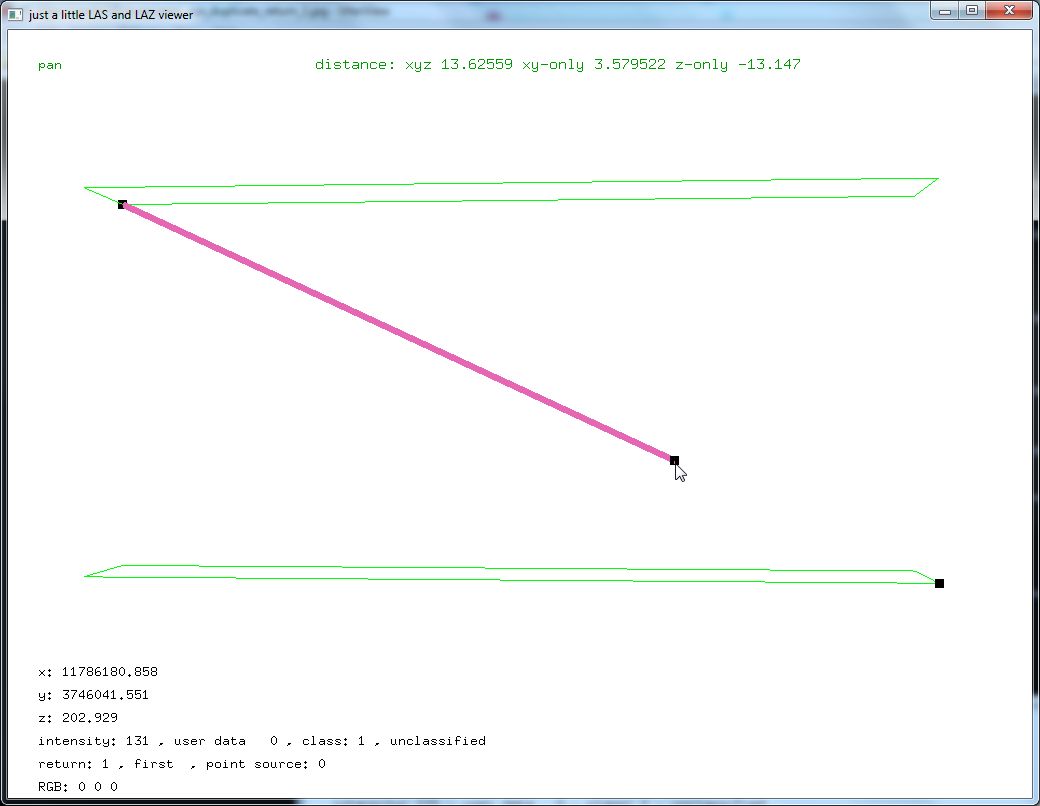
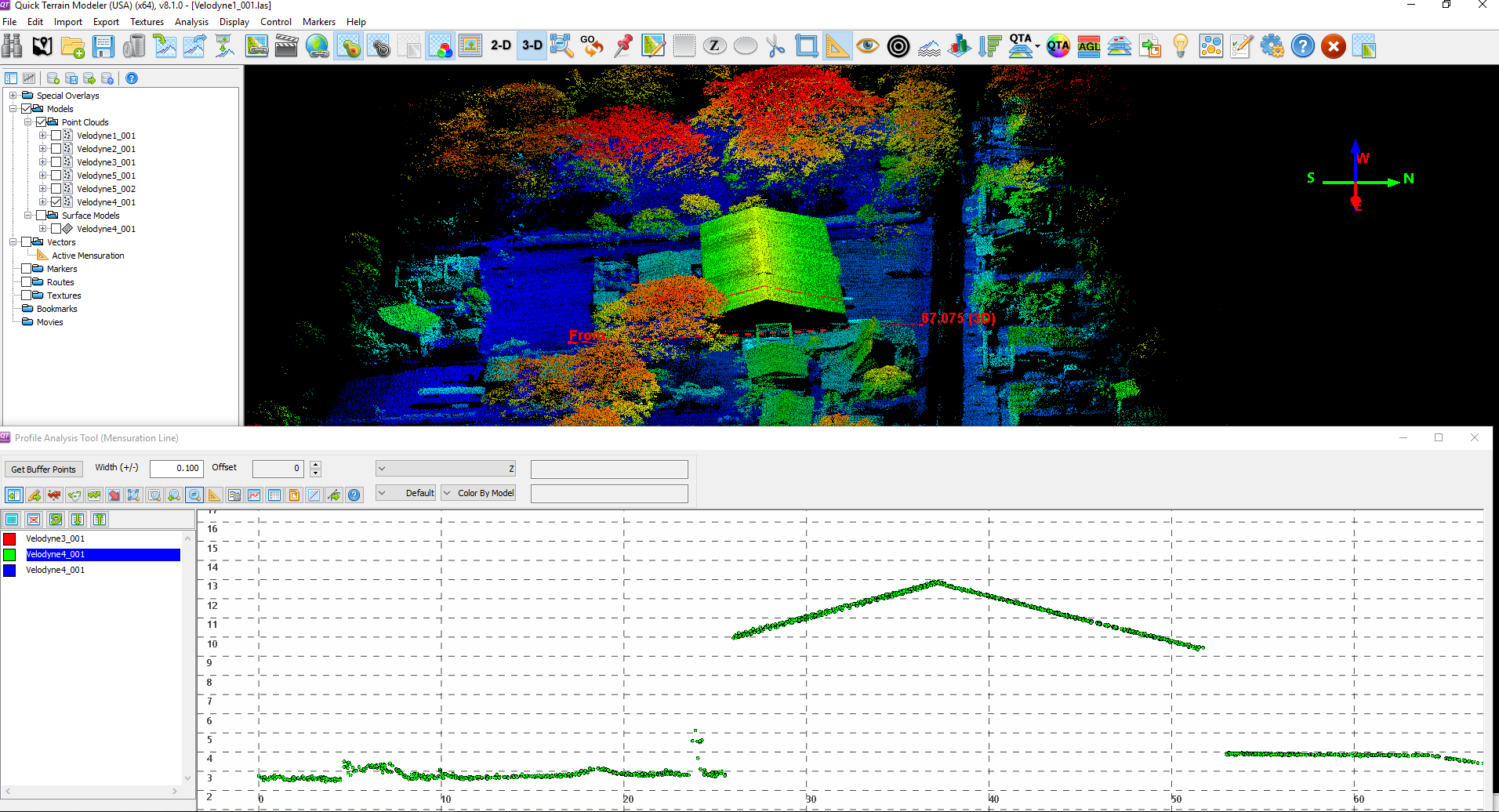
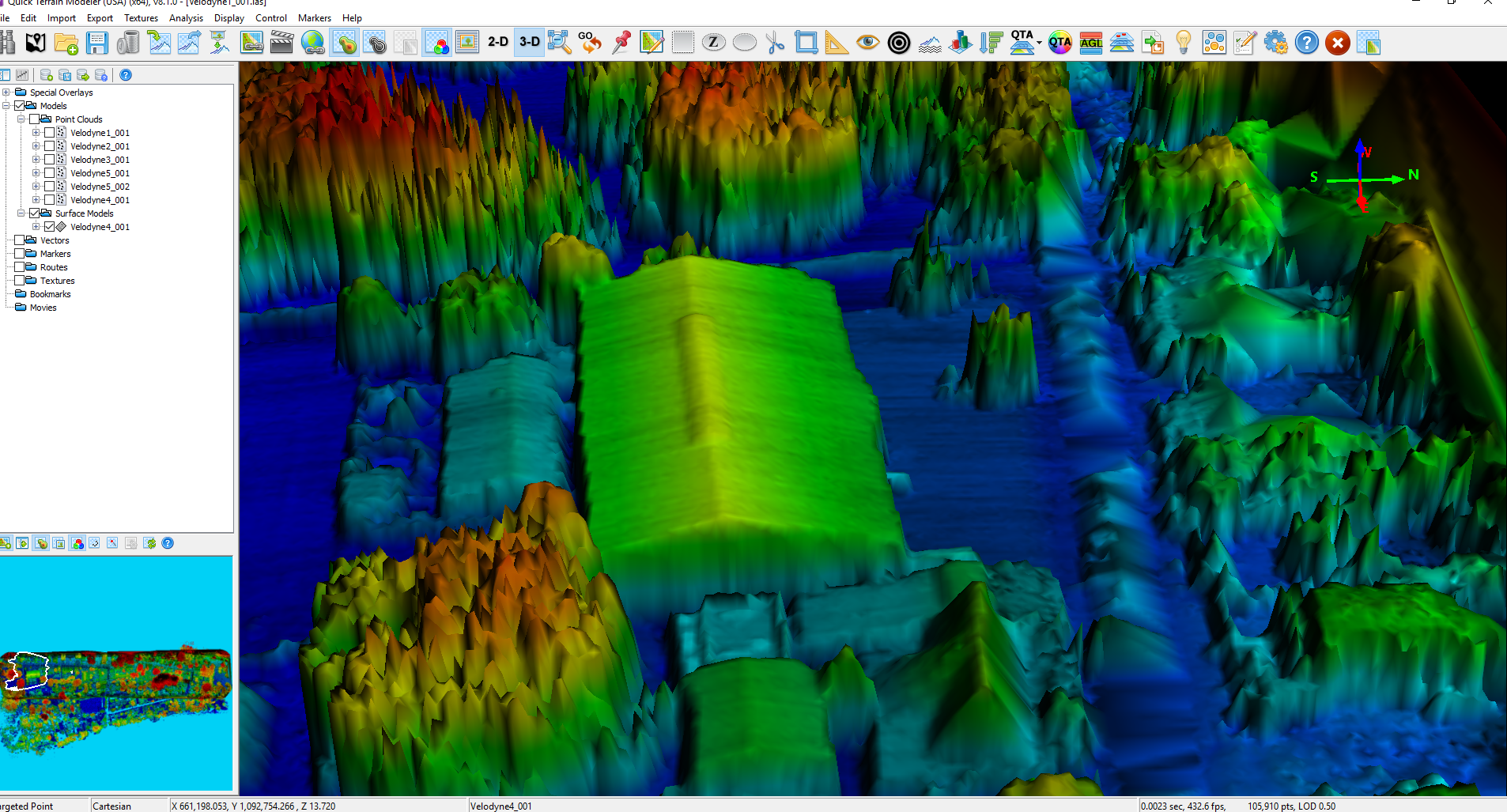
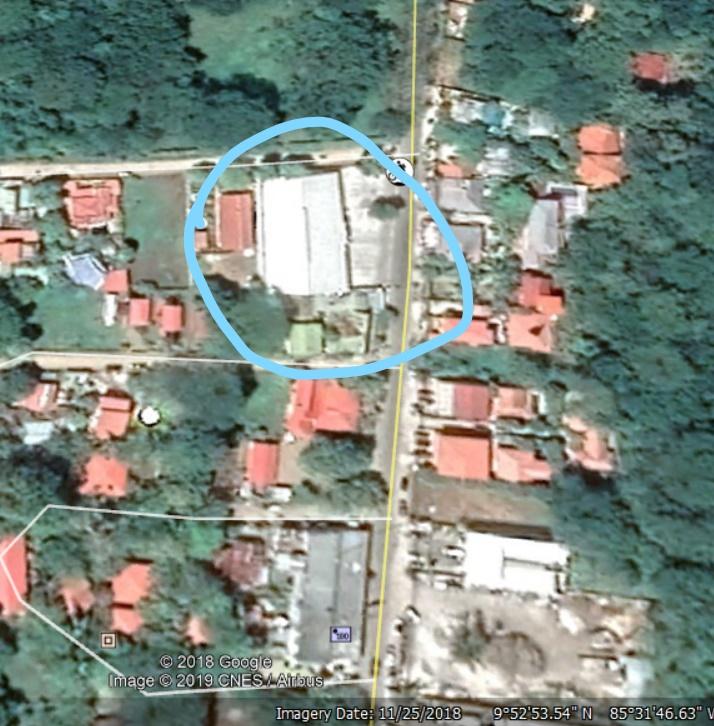
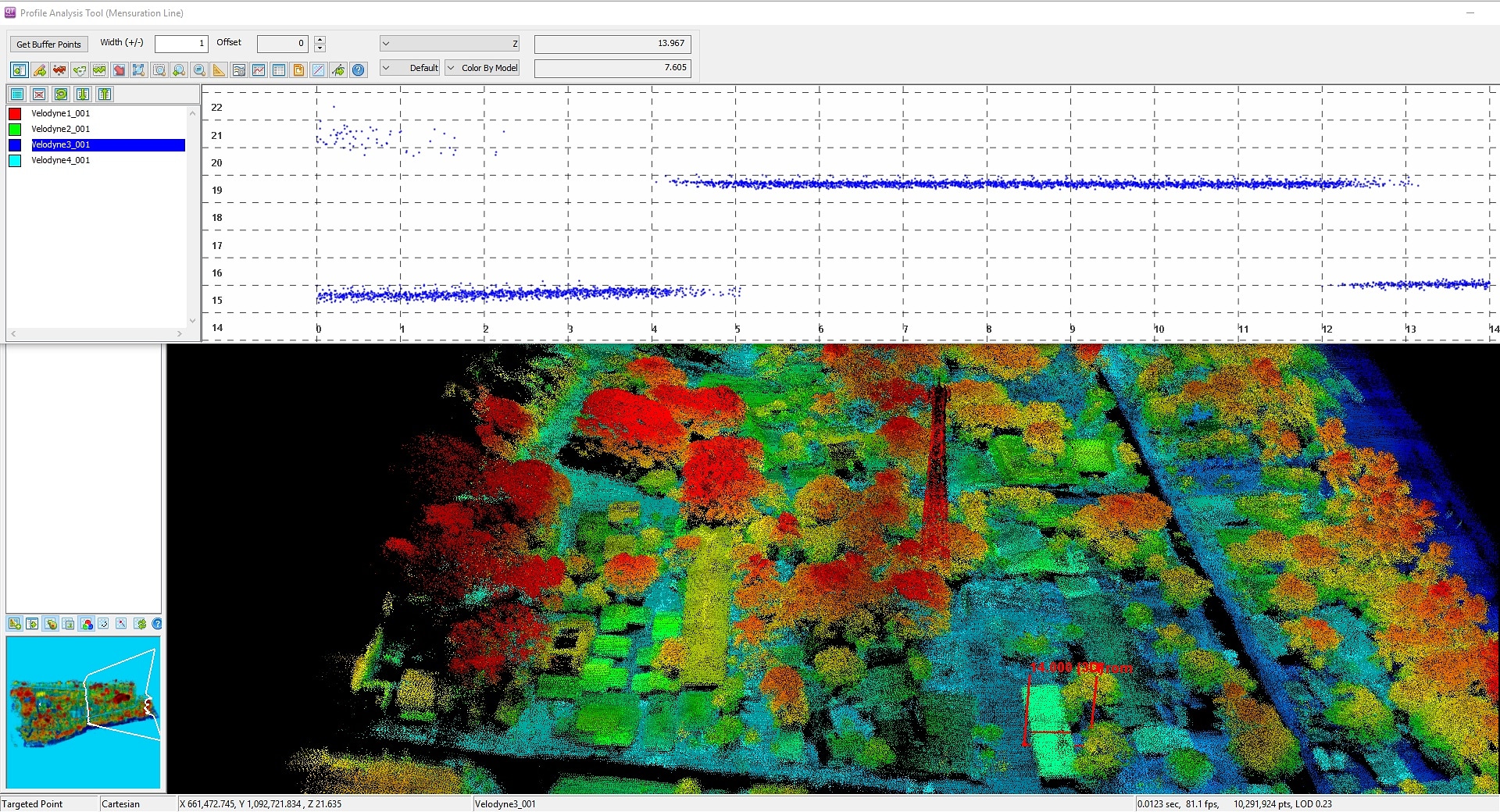
Have you seen these kind of wobbling flight lines shown in the 32 images? The composite seems to average all somewhat into place but those averages are far far less precise than I would like them to be. You see see the TIN resulting from triangulating the returns of a 15 second LiDAR drone flight. The first TIN is all returns from all beams of the 32 beam Velodyne LiDAR. The following TINs only use the returns from a single beam or channel of the system. The drone flies 70 meter above ground and carries a Snoopy Series A HD system by LiDARUSA with an integrated Velodyne HDL 32 laser scanner. The building in the center is regular shaped rectangular building (i.e. a warehouse), on its left is a small lodge and an empty field, and on its right is a concrete parking lot and a fresh tar road. Clearly the GPS / IMU trajectory was either not applied correctly, or has too low accuracy (there was no base station so that PPP was used to correct the trajectory), or something else. I am usually not involved in that part of a LiDAR processing workflow so ... what do the experts say?
Regards,

Konstantin Lisitsyn
--
Download LAStools at
http://lastools.org
http://rapidlasso.com
Be social with LAStools at
http://facebook.com/LAStools
http://twitter.com/LAStools
http://linkedin.com/groups/LAStools-4408378
Manage your settings at
http://groups.google.com/group/lastools/subscribe
Martin Isenburg
The nearest base station for getting Rinex files from Costa Rica's National Geographic Institute network of continuous operation GNSS reference stations is 30 km from the site where we flew. What software do you use to process the output of your airborne Velodyne LiDAR system?

James Young
--
Download LAStools at
http://lastools.org
http://rapidlasso.com
Be social with LAStools at
http://facebook.com/LAStools
http://twitter.com/LAStools
http://linkedin.com/groups/LAStools-4408378
Manage your settings at
http://groups.google.com/group/lastools/subscribe
<super_new_china_channel_15.jpg>
<super_new_china_channel_31.jpg>
<super_new_china_channel_all.jpg>
Martin Isenburg
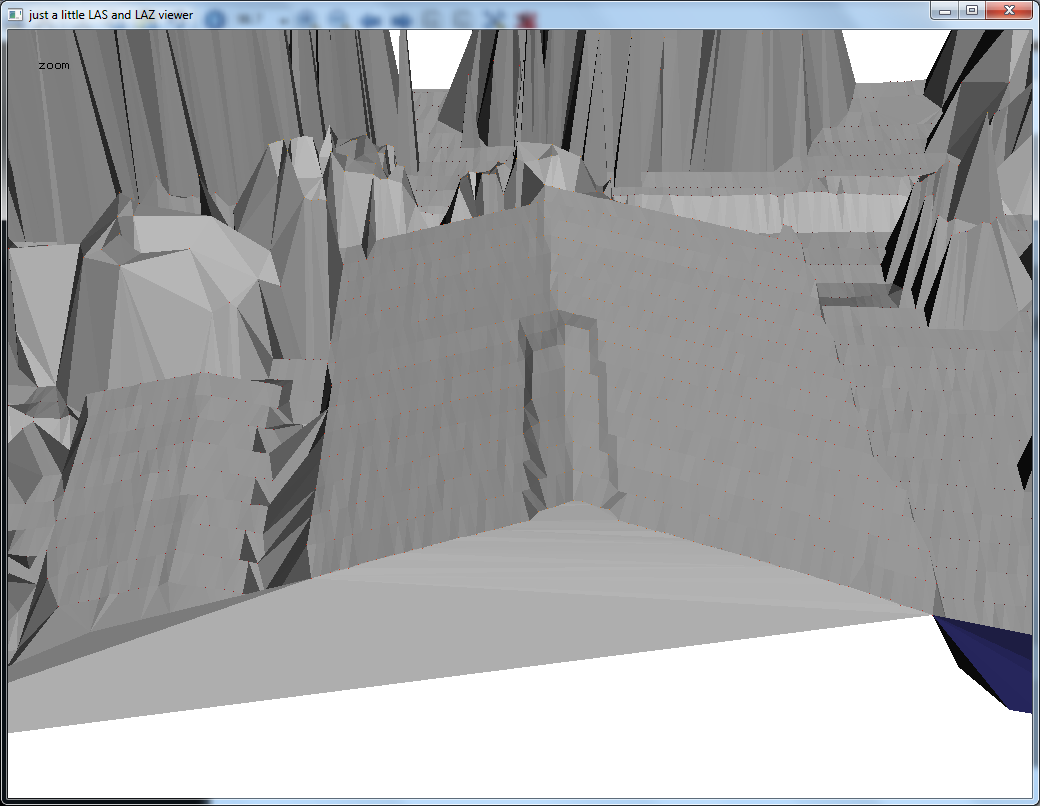
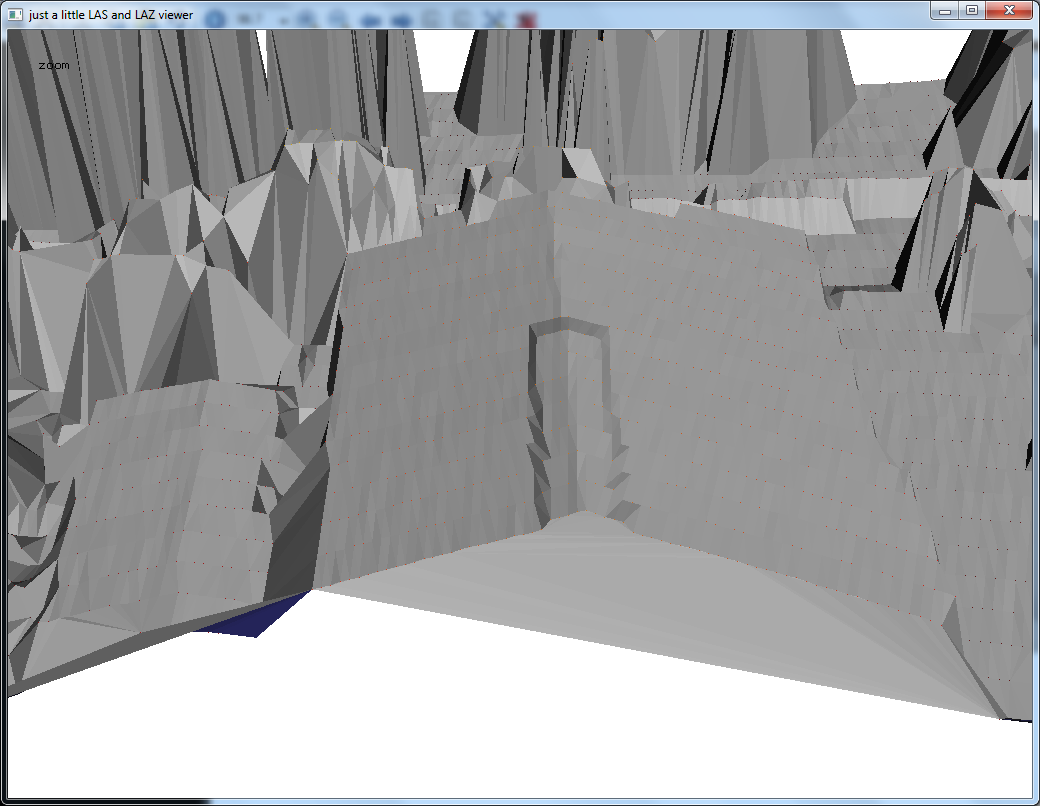
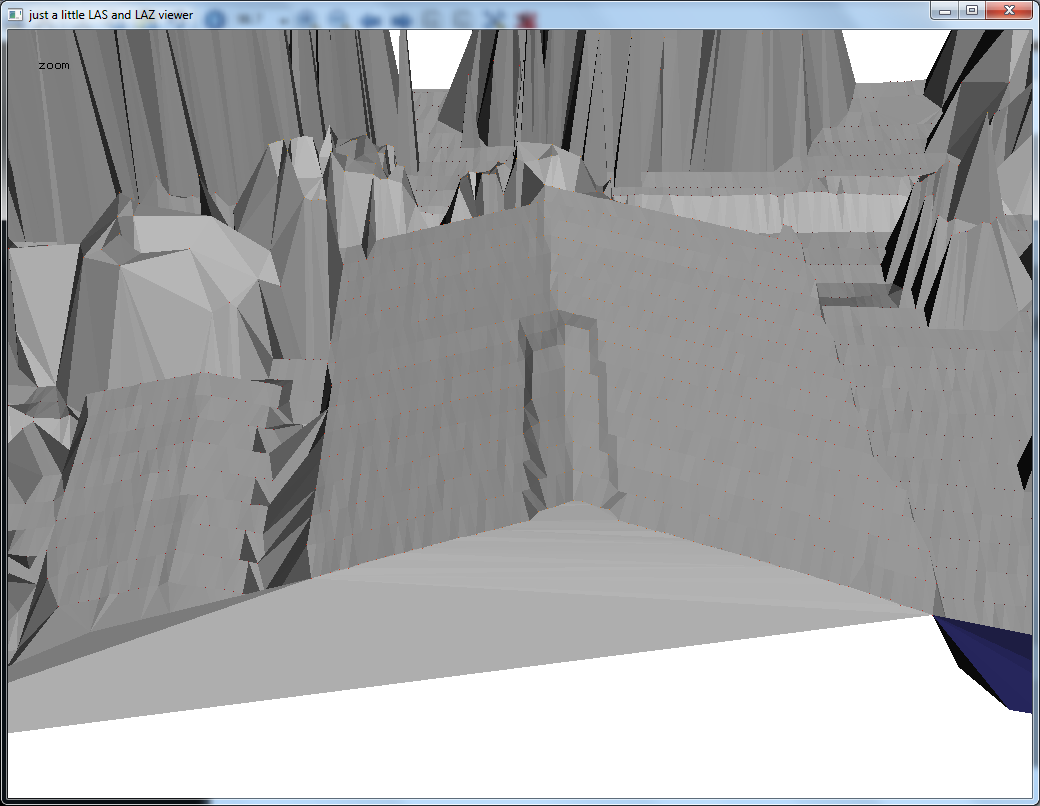
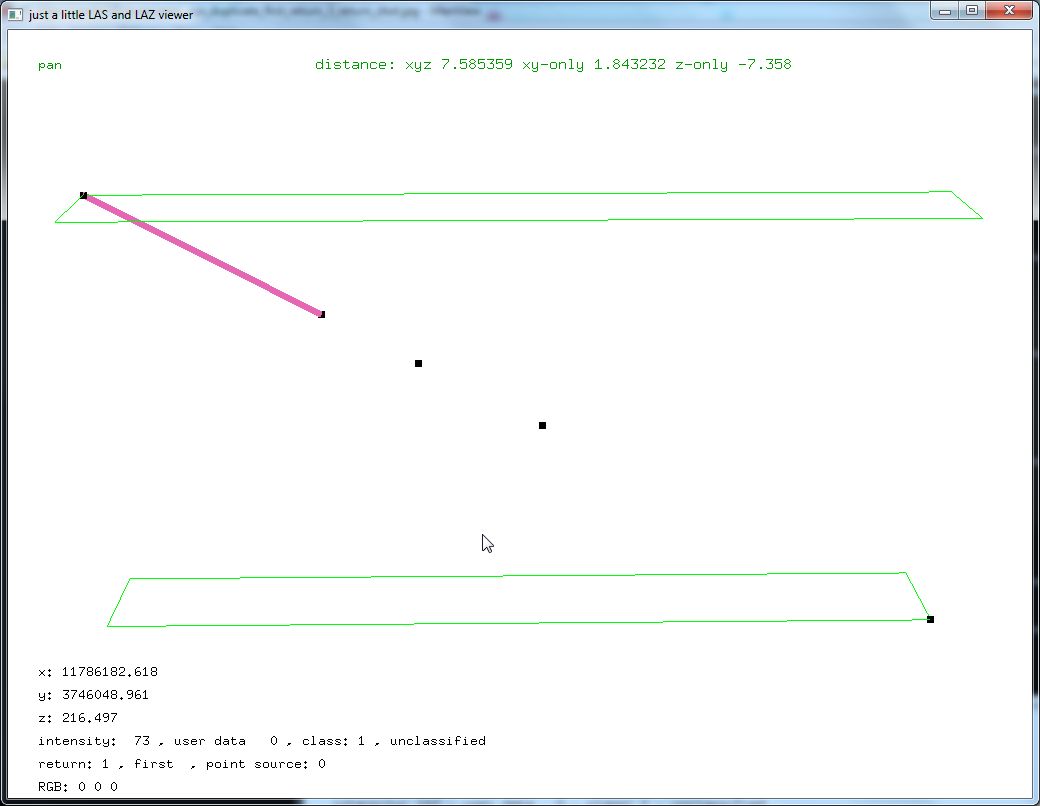
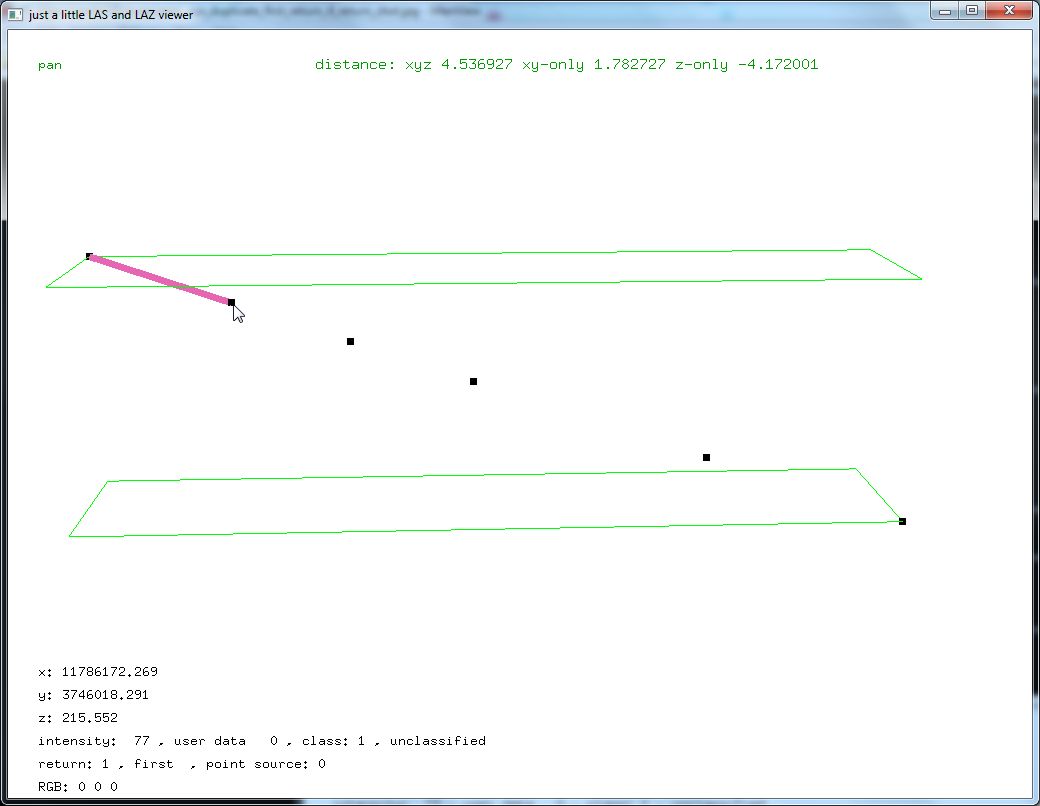
Below two individual consecutive "clean freeze frames" of 50 milliseconds of data each corresponding to one scanner head rotation. They all look this clean. But when I put 2 together aka 100 milliseconds of data the issue starts showing. And when I put 4 together aka 200 milliseconds of data it gets worse. And when I put 10 together aka 0.5 seconds of data it is really no longer pretty.

Mark Levitski
I will begin by stating that I am hardware neutral. I have processed data from both the Velodyne 32 with a good STIM IMU and the Riegl mini VUX with an even higher end FOG IMU. Both for “survey grade” uses. I can say that although the Riegl produces better results, the Velodyne was accurate enough for the same purposes with some extra but minimal processing. Our supplier did some extra work to calibrate the individual lasers, so that might explain the different opinion I have. Our current Riegl system supplier has software that makes it easier to calibrate the multiple lasers of the Velodynes.
UAV lidar is not as simple as attaching a lidar to a drone and looking at the resultant point cloud. The industry is following the same evolution as did (is) UAV photogrammetry and SFM software. I think at one time everyone thought they could buy a cheap drone and a camera and pull it out of the trunk of their car to fly for survey data. Eventually the wake up call came.
Good GNSS, IMU, and flight parameters are needed. Some of that costs money, more than most are willing to invest. Then there’s the know-how to post process and the software needed. More investment, but worthwhile. The survey people are by nature accuracy freaks. And they have formed much of the world with their work. We need to give them what they need.
Unless for research, educational uses, or just playing around with the technology for fun, my advice is to stay with a supplier who has put his business reputation on assembling a turn-key package that is already proven to yield a deliverable result that will not put your own business reputation at risk. Many of our potential clients have been through and experience with someone who gave them bad data. Their attitude is difficult to overcome to sell them the real thing.
Too much coffee, I digress. Main point here is no differential corrections, question re: IMU, and individual laser calibrations for my two cents.
Mark
Sent from Mail for Windows 10

Sam Hackett
Mark Levitski
Having been advised by different lidar hardware suppliers as well as surveyors, 30KM is too long of a baseline to rely on for CORS corrections, that is if it is the sole source. We go no more than 5-6 miles.
For fluctuation corrections (they are extremely minor with the system we fly with) we use Terramatch as a routine part of the workflow.
Sam, I’m afraid my source is commercial and would likely not share their proprietary work. I know that LidarUSA, the supplier of the previous system I worked with, somehow calibrated the lasers in a more manual and tedious way. But they are also commercial and I suspect guarded about sharing things. They are great people and I wouldn’t hesitate to contact them. They have a lot of experience with Velodyne for surveying. I am a bit out of my league with the research and educational world of lidar. I am a true turn-key end user that relies mostly on GUIs and only strives to learn what I need to produce the best data for my clients. I am in awe of what it takes behind the scenes for all this to work. God bless the developers and code writers! Swapping is uncommon in this world. LOL
Best……………Mark
Martin Isenburg

Shavers, Ethan
Martin Isenburg
PS: Btw ... if you use MiniVUX system by LiDARUSA and export with ScanLook to LAZ there is a good chance that you cannot distinguish between shots resulting in single, double, triple, and quadruple returns because of an error in the way the "number of returns" is exported. Contact me if you have such exports for how to fix them.
Martin Isenburg
Martin Isenburg
(a) has an older bug-free versions of LiDARUSA's ScanLookPC software to re-process the data
(c) has software from another vendor that can process these files also, or
(d) is willing to try a SLAM solution to align and self-georeference the data
Martin Isenburg

jordan.litt...@gmail.com
jordan.litt...@gmail.com
Martin Isenburg
I would like to add that it is very difficult to learn proper operation of these systems without in-depth, hands-on training. I hope I did not come off as rude in my previous comment. Have a good weekend everyone!
--
Martin Isenburg
Martin Isenburg
Another blog post detailing the 5 "LAS export bugs" that have existed at least in ScanLookPC 1.0.181 though 1.0.191 is in the works but we are still waiting (sigh ... |-:) to get the exact same second of UAV data exported both from an older (correct GPS time stamps) and newer (buggy GPS time stamps) version of ScanLookPC to finally conclude this odyssey ... (-:
drone:
https://mega.nz/#F!zJ9EkCBT!wQ9WfPbsFQ_OLp723WZttg

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Blake Lytle
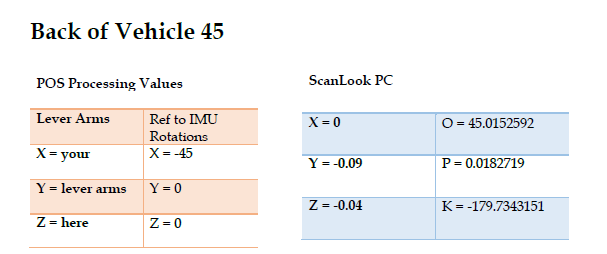
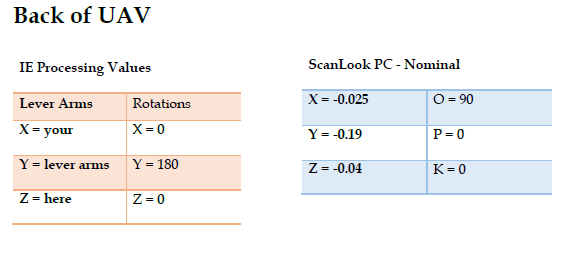
Martin, do you have the boresight information for your platform?
Martin Isenburg
{kind=link}