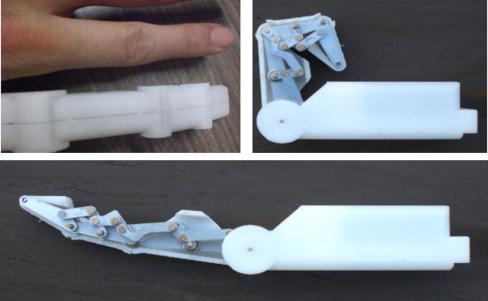
Using InMoov for a Prosthetic Arm

Brancante
Hello All,
I have been playing around with an EKG/EMG Shield to detect a muscle movement to control the InMoov Hand.
The progress is good, but needs a lot of work still.
This is the first video I have made: http://www.youtube.com/watch?v=ZUIqR2JodlY
I am using the SHIELD-EKG-EMG from olimex: https://www.olimex.com/Products/Duino/Shields/SHIELD-EKG-EMG/
But this is a single Channel EMG and I am having a hard time decoding advanced movements. I have ordered a different shield with four channels.
I will continue the development and will post the updates and Tutorials.

gael langevin
Didn''t expect through your email the other day, how advanced you were. I' m sure the Fablab of Rennes France will be happy to see this. This is full of promises!
Brancante
I have implemented new features, now I can make multiples movements controlled by the muscle with combination of specific modes. The modes can be configured by a smartphone and wifi.
Here is a small tutorial:
What you need:
InMoov Arm
Arduino uno R3
EMS Shild - https://www.olimex.com/Products/Duino/Shields/SHIELD-EKG-EMG/ (
Wifi Shield (UDP compatible)- http://www.ebay.com/itm/UART-WiFi-Server-Client-Module-Kits-Arduino-Compatible-with-shield-for-Arduino-/130766449058?pt=LH_DefaultDomain_0&hash=item1e7249a9a2
Software TouchOSC (for smartphone and Workstation) - http://hexler.net/software/touchosc
The Wifi Module should be configured as UDP Server with fixed IP (ip and network from phone hotspot) and 57600 bps
This is the TouchOSC Layout:
https://dl.dropboxusercontent.com/u/14231908/EMG.touchosc
This is the code for Arduino:
#include <Servo.h>
#include <compat/deprecated.h>
#include <FlexiTimer2.h>
#define SAMPFREQ 256 // ADC sampling rate 256
#define TIMER2VAL (1024/(SAMPFREQ)) // Set 256Hz sampling frequency
volatile unsigned char CurrentCh=0; //Current channel being sampled.
volatile unsigned int ADC_Value = 0; //ADC current value
volatile unsigned int ADC_Value1 = 0; //ADC current value
Servo myServo1;
Servo myServo2;
Servo myServo3;
Servo myServo4;
Servo myServo5;
Servo myServo6;
int pos = 0; // variable to store the servo position
int modo = 0;
int oscMsg[12]; // buffer for incoming OSc packet
int inByte = 0; // incomming serial byte
int inbyteIndex=0; // incomming bytes counter
float msgVal=0; // resulting message value
void setup()
{
Serial.begin(57600); // debug port
myServo1.attach(13); // pulso
myServo2.attach(8); //dedo mindinho
myServo3.attach(9); //dedo2
myServo4.attach(10); //dedo3
myServo5.attach(11, 576, 2384); //indicador
myServo6.attach(12); //poegar
}
void loop(){
int value99 = 0; //contador de numero de vezes
int value98 = 0; //contador de ups
while (value99 < 500) { //Here finds the muscle pattern.
if (Serial.available()) { // if we have new byte from LAN
if (getOscMsg()==1){ // add it to message while is is not ready
if (byte(oscMsg[1]) != 32){ //para evitar o envio de mensagem vazia
Serial.print(oscMsg[1]); // or print the OSC message name
Serial.print(" / ");
Serial.println(msgVal); // and vaule
int value = msgVal;
switch(oscMsg[1]){
case'a':
if(value > 0 && value <= 180){
modo = 1; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'b':
if(value > 0 && value <= 180){
modo = 2; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'c':
if(value > 0 && value <= 180){
modo = 3; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'd':
if(value > 0 && value <= 180){
modo = 4; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'e':
if(value > 0 && value <= 180){
modo = 5; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'f':
if(value > 0 && value <= 180){
modo = 6; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
}
}
}
}
delay(1);
ADC_Value = analogRead(CurrentCh);
value99 = value99+1;
if(ADC_Value > 400){
value98 = value98 + 1; //caso tenha o valor alto, adiciona um no contador
}
if(ADC_Value < 250){
value98 = value98 + 1; //caso tenha o valor alto, adiciona um no contador
}
}
if (value98 < 25){ //off
Serial.print("off"); //this is packet header for my application
Serial.println(ADC_Value);
myServo1.write(90);
myServo2.write(10);
myServo3.write(10);
myServo4.write(10);
myServo5.write(10);
myServo6.write(10);
delay(1);
}
else if (value98 >= 45){ //on
Serial.print("on"); //this is packet header for my application
Serial.println(ADC_Value);
Serial.println(value98);
if(modo <= 1){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // fechado
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(150);
delay(1);
}
if(modo ==2){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(10); // pinca
myServo3.write(10);
myServo4.write(10);
myServo5.write(140);
myServo6.write(150);
delay(1);
}
if(modo ==3){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // aponta
myServo3.write(150);
myServo4.write(150);
myServo5.write(15);
myServo6.write(20);
delay(1);
}
if(modo ==4){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(15); // Spider
myServo3.write(150);
myServo4.write(150);
myServo5.write(15);
myServo6.write(20);
delay(1);
}
if(modo ==5){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // Joia
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(20);
delay(1);
}
if(modo ==6){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(15); // hang
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(20);
delay(1);
}
}
}
// function to process simple OSC message sent by TouchOSC for iphone / ipad
float getOscMsg(){
inByte=Serial.read(); // read next serial byte
if (inByte == 47){ // if byte = slash it's message start
inbyteIndex=0; // and we set array pointer to 0
}
if ((inbyteIndex <= 11) && (inbyteIndex >= 0)){ // is it time to finish or can we start?
oscMsg[inbyteIndex]=inByte; // we add the byte to the array
inbyteIndex++; // increase array counter
}
if (inbyteIndex == 11){ // end of the message
inbyteIndex=-1; // set the pointer to -1 so we stop processing
union u_tag { // this is array to float conversation routine
byte bytes[4]; // I copied from Arduino.cc forum
float buffer;
}
u;
u.bytes[0]=oscMsg[11]; // to decode we have to supply bytes inr everse order
u.bytes[1]=oscMsg[10];
u.bytes[2]=oscMsg[9];
u.bytes[3]=oscMsg[8];
msgVal = u.buffer; // byte array to float
return 1; // signal we are ready to display value
}
return 0; // in this case the message is not ready yet

Alan Hart R & D Robotics
Just had a look at your video and one of the comments We would like to put the motors outside of the arm (for disabled people) and Gael langevin comes to meet us in Rennes at the end of June with Nicolas Huchet to explore solutions
gael langevin
I'm glad you have published this. I also heard you got in contact with the FabLab of Rennes, and they were impressed about your work. I beleive this prosthetic system could really be benefic for low budget help.
I have been looking for very small linear actuators to integrate the hand or in the forarm to reduce even more the space used by the servos. The challenge in Rennes is that the person, Nicolas Huchet, is missing the hand, and therefor the forarm isn't needed. So the idea is or to create a socket on the forarm with the actuators, or to totally modify the InMoov hand for to integrate small actuators inside.
This being said, it seems that linear actuators are slow, expensive and not very powerfull and I wonder how this could be processed differently.

Jackie Huen
gael langevin
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.
To post to this group, send email to inm...@googlegroups.com.
Visit this group at http://groups.google.com/group/inmoov.
For more options, visit https://groups.google.com/groups/opt_out.
Brancante
Brancante
Hello Jackie,
As myoelectric is something relative new, I could not find material about it. My tip is start on the big muscles and attached to the computer to find your patterns and than take down to lower platform like arduino. I have ordered a myoelectric sensor with more channels so soon I will be able to decode more complex movements. For now I am combining the myoelectric stimulation with different modes chosen on a smartphone to be able to do practically any movements.
Have you seen this: http://pranoysaji.wordpress.com/2013/05/30/myo-the-band-that-control-the-computer-by-listening-to-our-muscle-movement/
I think might be of help.
gael langevin
--
Jackie Huen
--
You received this message because you are subscribed to a topic in the Google Groups "InMoov" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/inmoov/vI1sG6WvnQc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to inmoov+un...@googlegroups.com.
Brancante
@ Jackie,
I see now what you mean! That is a good project.
Since the muscle might have atrophy, the fine-tuning can be hard, but can be done.
Everything I use is Arduino based. A Shield from Olimex to get the signal( OLIMEX-EKG/EM) and I a PC Software to see the patterns. The software is ElecGuru. (https://www.olimex.com/Products/Duino/Shields/SHIELD-EKG-EMG/resources/ShieldEkgEmgDemo.zip)
I started with try and error to manage the first movements, but since you are going to have weaker signals, I recommend you reading this article:
http://www.stanford.edu/~shenoy/GroupPublications/RiveraAlvidrezEtAlIEEEEMBC2010.pdf
@ Gael,
Yes, that ought be very fragile, thus, not practical!
Have you seen this Linear Servos?
I am developing an Open Source Myoelectric Prosthetic Arm and the size and power consumption of the SparkCore will be decisive.
Take a look:
Jackie Huen

10beema...@seecs.edu.pk
I have started working on same idea as part of my electrical engineering major project but my area of focus is sEMG feature extraction and recognition. I used this single channel olimex emg shield but I need to get other shield with multiple channels. Despite of lot online search, I haven't been able to find one. Could you tell me what multi-channel EMG shield have you ordered?

Abrar Satar
10beema...@seecs.edu.pk
gael langevin
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.

Uhebe UAV
I want to get started , my 3D printer will be arriving soon , and need to plan , I want to build a right hand and fore arm . to eventually evolve into my end goal which a bionic hand with super strength. this leaves me with a few questions. hope some one can help. with the InMoov hand as is what is the current grip force that the hand can deliver ? equal to human ? more ? less ? other question what is the total cost of manufacturing for a hand and forearm ? i want to start by designing a skin for the hand that has feeling.

Erin
There is a lot of potential for this project. I personally have done most of my work in signals analysis and software but this work combined with mechanical improvements can make an accessible, cheap product for potential amputees.
on track
Sent from my iPhone
--
You received this message because you are subscribed to a topic in the Google Groups "InMoov" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/inmoov/vI1sG6WvnQc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to inmoov+un...@googlegroups.com.
To post to this group, send email to inm...@googlegroups.com.
Visit this group at http://groups.google.com/group/inmoov.
For more options, visit https://groups.google.com/groups/opt_out.
<photo1.JPG>
<photo2.JPG>
Muhammad Abdullah

Oleg Galtsev
Full description about hands you can find by this link: http://www.rehab.research.va.gov/jour/2013/505/belter505.html
gael langevin
I read about Bebionic hand and that guys use servos in the hand. I found some information how they build there fingers. It seems very easy(see point (C)): http://www.rehab.research.va.gov/jour/2013/505/images/belter505f02th.jpg
Full description about hands you can find by this link: http://www.rehab.research.va.gov/jour/2013/505/belter505.html
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.
Brancante
gael langevin

Joel Hackett
a quick a dirty way to get your hand up and running it to transplant the circuit board out of a servo and wire it up to you're motor and pot, just need to use a servo with the same size motor or bigger and it should be fine.
gael langevin
Oleg Galtsev
среда, 6 ноября 2013 г., 2:48:09 UTC+3 пользователь gael langevin написал:
gael langevin
Oleg Galtsev

John McGrath
On Monday, June 17, 2013 7:14:51 PM UTC-4, Brancante wrote:
Thanks Gael.As promised, here is a new video and the tutorial.
I have implemented new features, now I can make multiples movements controlled by the muscle with combination of specific modes. The modes can be configured by a smartphone and wifi.
Here is a small tutorial:
What you need:
InMoov Arm
Arduino uno R3
EMS Shild - https://www.olimex.com/Products/Duino/Shields/SHIELD-EKG-EMG/ (
Wifi Shield (UDP compatible)- http://www.ebay.com/itm/UART-WiFi-Server-Client-Module-Kits-Arduino-Compatible-with-shield-for-Arduino-/130766449058?pt=LH_DefaultDomain_0&hash=item1e7249a9a2
Software TouchOSC (for smartphone and Workstation) - http://hexler.net/software/touchosc
The Wifi Module should be configured as UDP Server with fixed IP (ip and network from phone hotspot) and 57600 bps
This is the TouchOSC Layout:
https://dl.dropboxusercontent.com/u/14231908/EMG.touchosc
This is the code for Arduino:
#include <Servo.h>
#include <compat/deprecated.h>
#include <FlexiTimer2.h>
#define SAMPFREQ 256 // ADC sampling rate 256
#define TIMER2VAL (1024/(SAMPFREQ)) // Set 256Hz sampling frequency
volatile unsigned char CurrentCh=0; //Current channel being sampled.
volatile unsigned int ADC_Value = 0; //ADC current value
volatile unsigned int ADC_Value1 = 0; //ADC current value
Servo myServo1;
Servo myServo2;
Servo myServo3;
Servo myServo4;
Servo myServo5;
Servo myServo6;
int pos = 0; // variable to store the servo position
int modo = 0;
int oscMsg[12]; // buffer for incoming OSc packet
int inByte = 0; // incomming serial byte
int inbyteIndex=0; // incomming bytes counter
float msgVal=0; // resulting message value
void setup()
{
Serial.begin(57600); // debug port
myServo1.attach(13); // pulso
myServo2.attach(8); //dedo mindinho
myServo3.attach(9); //dedo2
myServo4.attach(10); //dedo3
myServo5.attach(11, 576, 2384); //indicador
myServo6.attach(12); //poegar
}
void loop(){
int value99 = 0; //contador de numero de vezes
int value98 = 0; //contador de ups
while (value99 < 500) { //Here finds the muscle pattern.
if (Serial.available()) { // if we have new byte from LAN
if (getOscMsg()==1){ // add it to message while is is not ready
if (byte(oscMsg[1]) != 32){ //para evitar o envio de mensagem vazia
Serial.print(oscMsg[1]); // or print the OSC message name
Serial.print(" / ");
Serial.println(msgVal); // and vaule
int value = msgVal;
switch(oscMsg[1]){
case'a':
if(value > 0 && value <= 180){
modo = 1; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'b':
if(value > 0 && value <= 180){
modo = 2; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'c':
if(value > 0 && value <= 180){
modo = 3; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'd':
if(value > 0 && value <= 180){
modo = 4; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'e':
if(value > 0 && value <= 180){
modo = 5; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
case'f':
if(value > 0 && value <= 180){
modo = 6; //variavel para determinar o movimento
Serial.print("MODO ");
Serial.println(modo);
value = 0;
break;
}
}
}
}
}
delay(1);
ADC_Value = analogRead(CurrentCh);
value99 = value99+1;
if(ADC_Value > 400){
value98 = value98 + 1; //caso tenha o valor alto, adiciona um no contador
}
if(ADC_Value < 250){
value98 = value98 + 1; //caso tenha o valor alto, adiciona um no contador
}
}
if (value98 < 25){ //off
Serial.print("off"); //this is packet header for my application
Serial.println(ADC_Value);
myServo1.write(90);
myServo2.write(10);
myServo3.write(10);
myServo4.write(10);
myServo5.write(10);
myServo6.write(10);
delay(1);
}
else if (value98 >= 45){ //on
Serial.print("on"); //this is packet header for my application
Serial.println(ADC_Value);
Serial.println(value98);
if(modo <= 1){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // fechado
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(150);
delay(1);
}
if(modo ==2){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(10); // pinca
myServo3.write(10);
myServo4.write(10);
myServo5.write(140);
myServo6.write(150);
delay(1);
}
if(modo ==3){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // aponta
myServo3.write(150);
myServo4.write(150);
myServo5.write(15);
myServo6.write(20);
delay(1);
}
if(modo ==4){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(15); // Spider
myServo3.write(150);
myServo4.write(150);
myServo5.write(15);
myServo6.write(20);
delay(1);
}
if(modo ==5){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(150); // Joia
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(20);
delay(1);
}
if(modo ==6){
Serial.print("MODO ");
Serial.println(modo);
myServo1.write(90);
myServo2.write(15); // hang
myServo3.write(150);
myServo4.write(150);
myServo5.write(150);
myServo6.write(20);
delay(1);
}
}
}
// function to process simple OSC message sent by TouchOSC for iphone / ipad
float getOscMsg(){
inByte=Serial.read(); // read next serial byte
if (inByte == 47){ // if byte = slash it's message start
inbyteIndex=0; // and we set array pointer to 0
}
if ((inbyteIndex <= 11) && (inbyteIndex >= 0)){ // is it time to finish or can we start?
oscMsg[inbyteIndex]=inByte; // we add the byte to the array
inbyteIndex++; // increase array counter
}
if (inbyteIndex == 11){ // end of the message
inbyteIndex=-1; // set the pointer to -1 so we stop processing
union u_tag { // this is array to float conversation routine
byte bytes[4]; // I copied from Arduino.cc forum
float buffer;
}
u;
u.bytes[0]=oscMsg[11]; // to decode we have to supply bytes inr everse order
u.bytes[1]=oscMsg[10];
u.bytes[2]=oscMsg[9];
u.bytes[3]=oscMsg[8];
msgVal = u.buffer; // byte array to float
return 1; // signal we are ready to display value
}
return 0; // in this case the message is not ready yet
}
On Sunday, June 16, 2013 5:15:10 PM UTC-3, gael langevin wrote:Fantastic Brancante!
Didn''t expect through your email the other day, how advanced you were. I' m sure the Fablab of Rennes France will be happy to see this. This is full of promises!
gael langevin
Muhammad Abdullah
Hi John,Brancante is using a smartphone or a Ipad for to switch modes, check his other videos it is very interresting.
--
You received this message because you are subscribed to a topic in the Google Groups "InMoov" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/inmoov/vI1sG6WvnQc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to inmoov+un...@googlegroups.com.
To post to this group, send email to inm...@googlegroups.com.
Visit this group at http://groups.google.com/group/inmoov.
For more options, visit https://groups.google.com/groups/opt_out.
Oleg Galtsev

mick

Hema Palaniappan
HI Brancante
i am actually developing an automated physiotherapy device...bt im nt sure how to detect the muscle movement via electric guru using olimex ekg shield...cn u let me know?

ahmed zikry
Hi ALL,

Freddy Mike Angel Morando Hernandez

Dalia Danila
I saw that the first time, you placed the electrods on different muscles. There is any particular reason for doing so?
Thanks,
Dalia
On Sunday, June 16, 2013 10:39:18 PM UTC+3, Brancante wrote:
> Hello All,
> I have been playing around with an EKG/EMG Shield to detect a muscle
> movement to control the InMoov Hand.
> The progress is good, but needs a lot of work still.
> This is the first video I have made: http://www.youtube.com/watch?v=ZUIqR2JodlY

Mohit Chaudhary
I just came across this group when I was searching for help with the Olimex EMG/EKG shield.
I've already built a servo-driven prosthetic arm that is controlled by a bluetooth. (here's a link of a demo video - https://www.dropbox.com/s/k52t7q9jdi88el4/Robotic%20Hand%20Demo.MOV)
I am now looking to work on an upgraded version that is smaller in size, better grip, more hand configurations but ALSO will take a myoelectric input.
For now, I just simply want learn how to be able to turn on an LED when I flex a muscle! It may sound real juvenile but I have no clue how to register/record the input.
I'm running a macbook and its kinda old so I am not able to run electricguru. I'm not sure if its relevant but thought to share.
I could use some guidance and/or help! Thanks in advance!
- Mohit

Lei Shi
在 2013年10月30日星期三UTC-4下午6时57分43秒,Brancante写道:

Akshay Ravindran
Gustavo Brancante
--
You received this message because you are subscribed to a topic in the Google Groups "InMoov" group.
To unsubscribe from this topic, visit https://groups.google.com/d/topic/inmoov/vI1sG6WvnQc/unsubscribe.
To unsubscribe from this group and all its topics, send an email to inmoov+un...@googlegroups.com.
To post to this group, send email to inm...@googlegroups.com.
Visit this group at http://groups.google.com/group/inmoov.
For more options, visit https://groups.google.com/d/optout.
gael langevin
Using two sets of sensors will let you have a double way to control the hand.
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.
Gustavo Brancante
gael langevin
Akshay Ravindran
Regards,
Akshay S Ravindran
Hub Student Representative
Travancore Hub| IEEE LINK |
Chairman | IEEE SB TKMCE

Ali Lemus
Ali Lemus
Here is a video of the first test we have done with the myo arm band and the InMoov hand.
The main problem is the initialization sequence of the thalmic which normally requires finger movements for calibration. Of course it is a problem when you are an amputee. Though it has been possible to bypass that calibration procedure.
gael langevin

Abheerup Bhalla
As far as ElecGURU is concerned, the ECG, EMG signals are fine.
But i suppose we cannot just do the "per finger" decision making without interfacing this shield to MATLAB & doing some preprocessing (digital signal processing) on the shield data.
Is it true? Or is there any other way to actuate motors without it.?
What approach did you apply?
Kindly Reply.
...
gael langevin
http://youtu.be/WNhZKFth9EM
--
Abheerup Bhalla
regards
Abhirup

Beckah Sheeler
I am part of a college Women In Computer Science group who is trying to do just that!
I look forward to seeing updates.
gael langevin
Last update on the new InMoov2 hand is here:
http://www.inmoov.fr/january-and-lots-of-progress/
--
Beckah Sheeler
I was wondering id you had any luck with the shield and if you would be willing to share the any script or resources you've used to interface the Muscle V3 Sensor? The college women in computer science group I am a part of is trying to interface the shield with our arm and anything help at all!
On Wednesday, October 30, 2013 at 6:57:43 PM UTC-4, Brancante wrote:
Hello All,
The Shield I ordered that can combine multiple channels is this: http://www.advancertechnologies.com/p/muscle-sensor-v3.htmlBut there is no need to combine many, you can work well with one or two. The point is to combine sequences of stimulations to execute different movements. You can also use the wifi on the phone to change the working mode of the prosthetic.
gael langevin
http://www.inmoov.fr/advancer-technologie-script-to-control-the-hand/
--

William Cândido Ribeiro
Abheerup Bhalla
https://youtu.be/8yMHkhe-3BM
Here's my work
William Cândido Ribeiro

Here's my work, after I'll post some video on the go

Andrea Lubrano
myServo4.write(150);
myServo5.write(150);
myServo6.write(20);
delay(1);
}
}
}
// function to process simple OSC message sent by TouchOSC for iphone / ipad
float getOscMsg(){
inByte=Serial.read(); // read next serial byte
if (inByte == 47){ // if byte = slash it's message start
inbyteIndex=0; // and we set array pointer to 0
}
if ((inbyteIndex <= 11) && (inbyteIndex >= 0)){ // is it time to finish or can we start?
oscMsg[inbyteIndex]=inByte; // we add the byte to the array
inbyteIndex++; // increase array counter
}
if (inbyteIndex == 11){ // end of the message
inbyteIndex=-1; // set the pointer to -1 so we stop processing
union u_tag { // this is array to float conversation routine
byte bytes[4]; // I copied from Arduino.cc forum
float buffer;
}
u;
u.bytes[0]=oscMsg[11]; // to decode we have to supply bytes inr everse order
u.bytes[1]=oscMsg[10];
u.bytes[2]=oscMsg[9];
u.bytes[3]=oscMsg[8];
msgVal = u.buffer; // byte array to float
return 1; // signal we are ready to display value
}
return 0; // in this case the message is not ready yet
}
On Sunday, June 16, 2013 5:15:10 PM UTC-3, gael langevin wrote:Fantastic Brancante!
Didn''t expect through your email the other day, how advanced you were. I' m sure the Fablab of Rennes France will be happy to see this. This is full of promises!

{kind=link}
{kind=link}
{kind=link}
Dominik Dankó
As a university thesis I build an upper limb prosthetic arm, but I have some problems with the arduino uno rev 3 and an olimex emg ekg shield, because somehow I can not get the right value. I already tried so many codes, but the results were the same, every time I got 2,5V. I saw that you used the same device and worked very well. Could we speak about a bit how can I measure the right values?
Dominik
gael langevin
--
You received this message because you are subscribed to the Google Groups "InMoov" group.
To unsubscribe from this group and stop receiving emails from it, send an email to inmoov+un...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/inmoov/41686e52-1cad-4579-be04-14637d3427c1n%40googlegroups.com.