Ld-air (ld19) LIDAR early review
181 views
Skip to first unread message

Michael Wimble
Sep 14, 2021, 4:41:16 PM9/14/21
to hbrob...@googlegroups.com
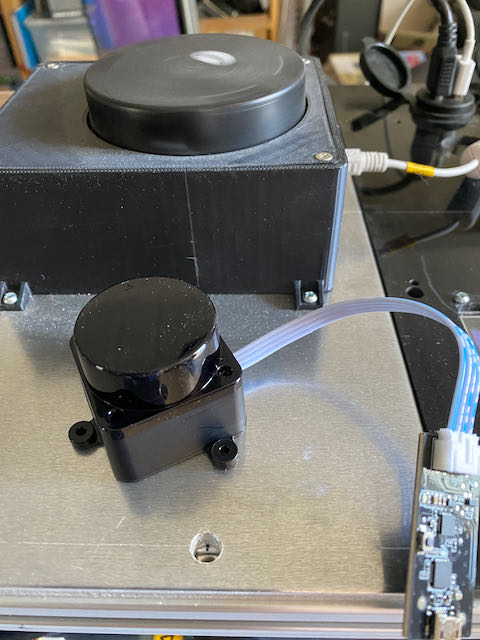
Got my new ld-air (ld19) lidar today. (small unit in fron in the picture) Using software from: https://github.com/linorobot/ldlidar.
Had to change the include in lipkg.h to
"sensor_msgs/msg/laser_scan.hpp". I'm doing this in Ubunto 20.04 with
foxy release of ros2. Scan works. 10Hz rate, about 0.8 degrees
resolution. Minimum distance about an inch and a half. Saw some pauses
in the data, still investigating.
I acquired it as part of their Kickstarter. You can buy them now via: https://www.indiegogo.com/projects/ld-air-lidar-tof-sensor-for-robotic-applications--3#/
Max range is claimed to be 12m and usable outside.They claim the minimum range is 20mm, and that may be true. My "inch and a half" was just watching for a change in rviz as I moved my hand closer. The 0.8 degrees, 10 Hz agrees with their 4500 samples per second.
Max range is claimed to be 12m and usable outside.They claim the minimum range is 20mm, and that may be true. My "inch and a half" was just watching for a change in rviz as I moved my hand closer. The 0.8 degrees, 10 Hz agrees with their 4500 samples per second.
It's
too early for a definitive recommendation. Off hand, it seems pretty
good, though. It's tiny, it's got better resolution than other many/most
other cheap LIDARs. It seems to live up to the 0.02 to 15m range. They
claim it should work outside. It's has a cap over the moving parts to
give some water/dust resistance. I need to do a lot more experiments
yet.

Gmail
Sep 14, 2021, 5:04:34 PM9/14/21
to hbrob...@googlegroups.com
Congrats! Looks great. Will you be using it for navigation?
<IMG_0257.jpeg>
--
You received this message because you are subscribed to the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/CE16ED51-7A77-4673-ABBF-9E2C712D6186%40gmail.com.
You received this message because you are subscribed to the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/CE16ED51-7A77-4673-ABBF-9E2C712D6186%40gmail.com.

Ryan D
Sep 14, 2021, 5:19:29 PM9/14/21
to hbrob...@googlegroups.com
woah, I looked the kick starter for the Lidar, its $129 dollars! and if it does what it says it does, its a remarkable improvement from my RP Lidar A1!
I might look into that lidar later when I need to work on my robots hull redesign 👀
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/19AE7488-1234-427D-A250-030BB8BA7761%40gmail.com.

Brian Higgins
Sep 14, 2021, 7:12:16 PM9/14/21
to hbrob...@googlegroups.com
Does it work out side?
Sent from my iPhone 12 Pro Max
On Sep 14, 2021, at 1:41 PM, Michael Wimble <mwi...@gmail.com> wrote:
<IMG_0257.jpeg>
--

Sergei Grichine
Apr 15, 2025, 12:27:24 PM4/15/25
to hbrob...@googlegroups.com
I installed LD-19 LIDAR on Dragger a couple months ago, and had no problem indoors. But when outdoors, a lot of random noise pops up. It messes up Global costmap and makes navigation impossible.
I modified code in my fork of the official driver, and updated my notes here:
In a nutshell, there's a noise filter in the original code, which is for some reason disabled for 14P/19P types. I also added a "min_intensity" parameter and experimented with combining beams into triplets, which cuts beam count from 504 to 167.
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/56E4F234-2F37-4C73-900C-B9F4C4453DA2%40gmail.com.
--
Best Regards,
-- Sergei
Reply all
Reply to author
Forward
0 new messages