My robot
12 views
Skip to first unread message

Mark Womack
Jan 5, 2022, 11:00:42 AM1/5/22
to hbrob...@googlegroups.com
There was some interest at yesterday's ROS discussion, and I didn't have my robot or pictures handy, so here are some pictures for those interested. This is my object avoiding, line following, edge detecting robot. It uses a Teensy 3.5 microcontroller, a Pololu Qik motor controller, Pololu mini metal gear motors, VL6180 ToF sensors and IR sensors for the lines and edges. The body of the bot is made up of some custom 3D printed parts intermingled with PCBs. I'm pretty proud of the build itself. Lots of wires, but it is very well organized. Unlike my earlier efforts. :-)
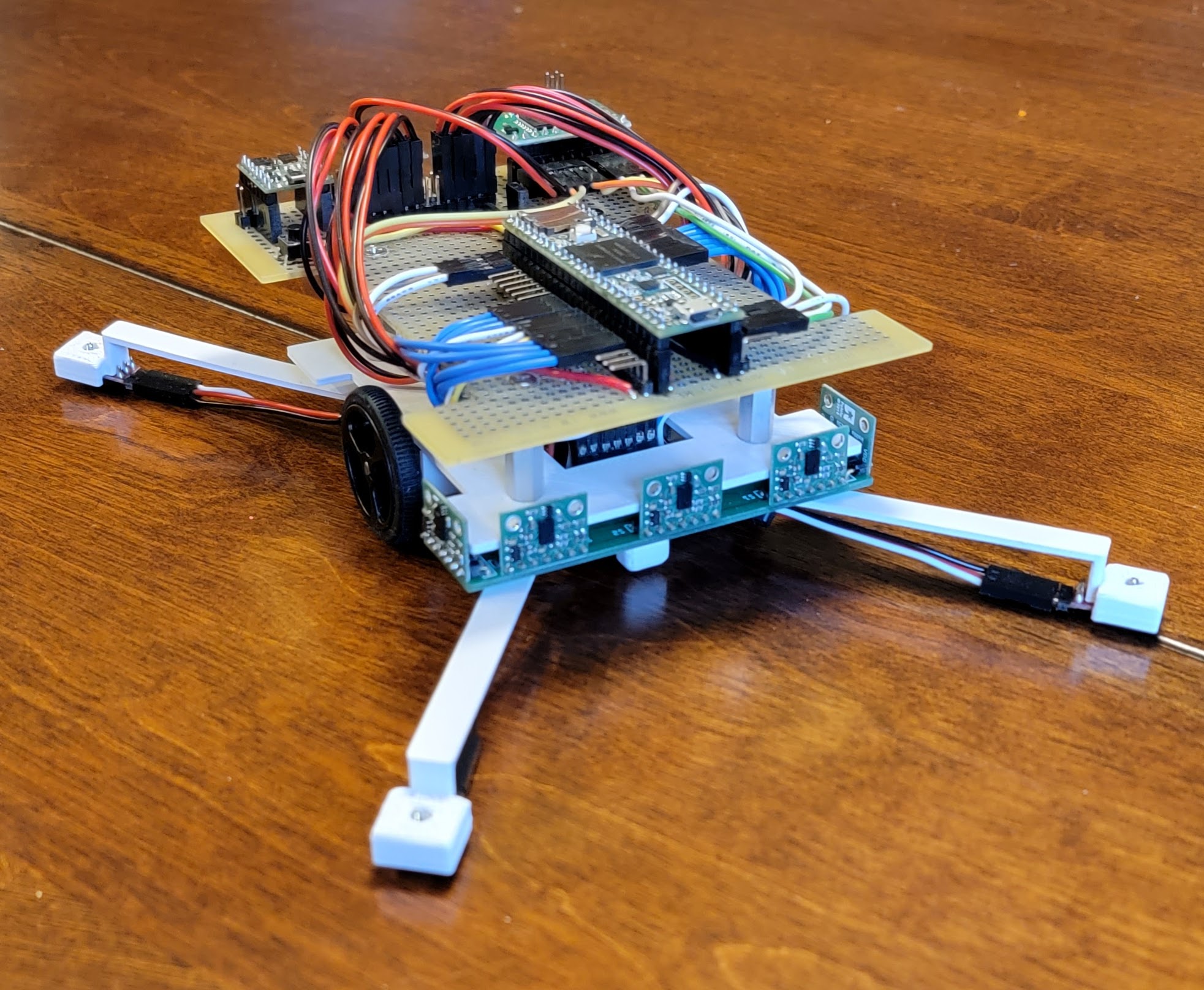
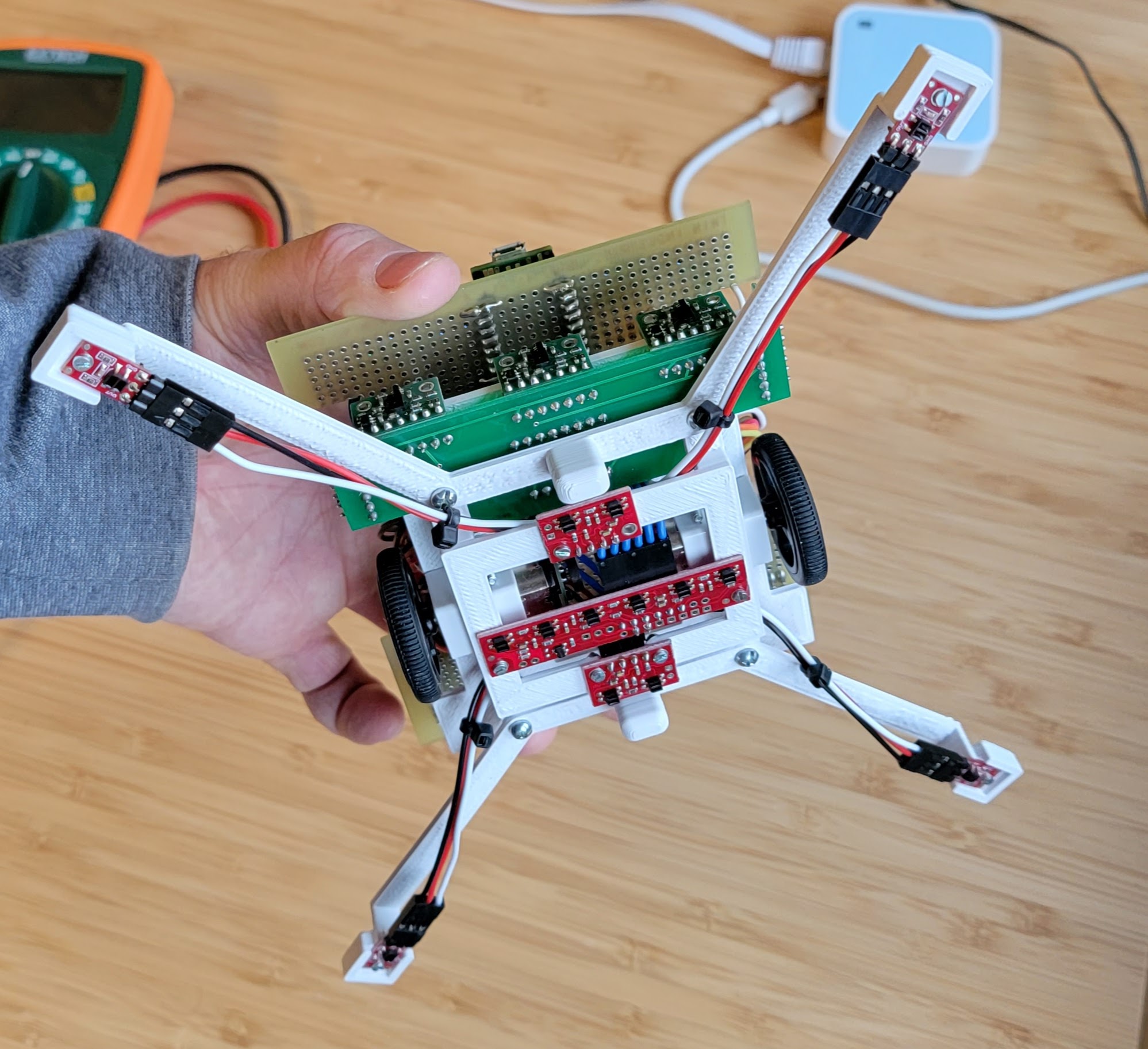
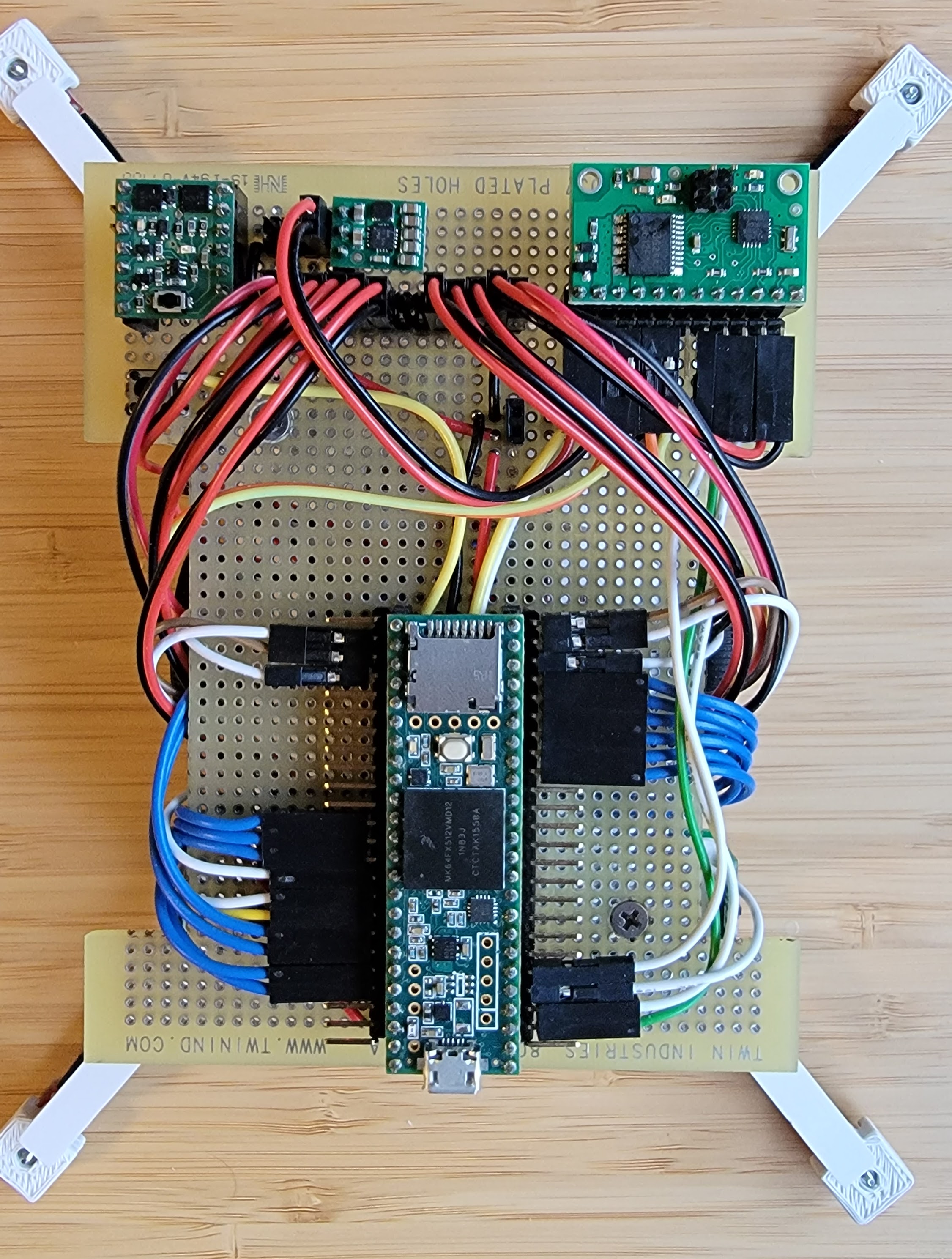
I created a custom PCB for the VL6180 sensors (which use I2C and have a fixed address) so I can select an individual sensor using a MUX selector. I guess Pololu or Sparkfun have a similar MUX part like this now, but at the time it was satisfying to figure it out for myself.
I'm in the process of debugging everything, connections, sensors, etc. My hope is to ROSify it at some point, and to use that learning in the Example bots.
-Mark
Reply all
Reply to author
Forward
0 new messages