I call it progress this time
瀏覽次數:5 次
跳到第一則未讀訊息

Chris Albertson
2022年1月7日 下午3:22:162022/1/7
收件者:hbrob...@googlegroups.com
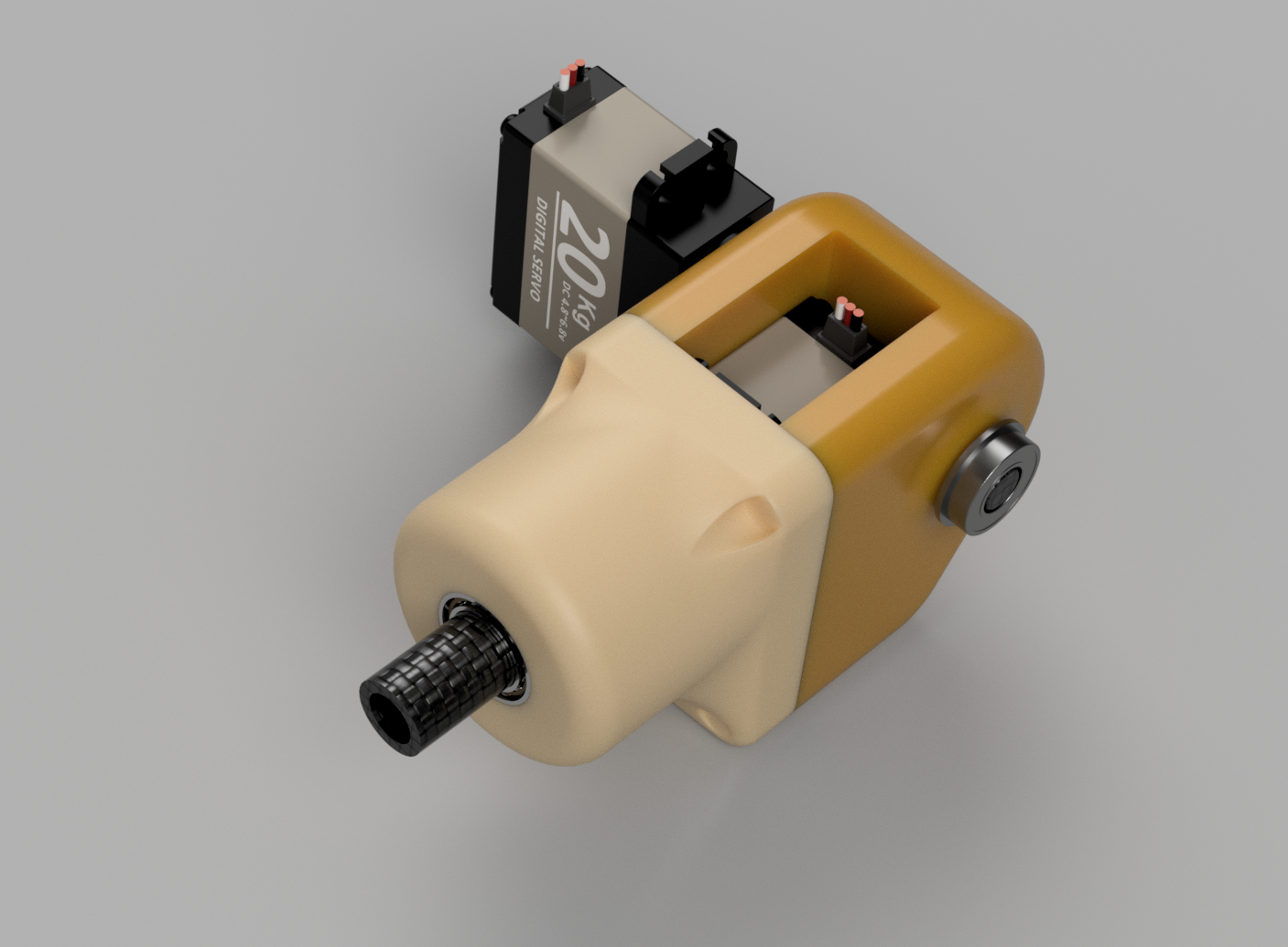
More hardware progress. I call it progress this time as I see only details I need to change. (1) the stance is too wide and (2) Plastic is not optimized for strength yet, It all should be equally strong with no over or undersized cross-sections.
I decided that the shoulder shall be based on a 12mm diameter carbon fiber tube rotating inside 12x18mm bearings. I found I can buy the bearing for under $2 each on Amazon and a lifetime supply of carbon tubing for about $25. 3D printed plastic fails when used as an axel shaft, but carbon is strong. I tried the more common "over the shoulder beam brace" and it looked ugly and limited the range of motion.
A design goal is to remove ALL the dog's weight from the servo motors and not depend on the bearings inside the servo. Hopefully next post shows real parts, not CAD renders.

Chris Albertson
Redondo Beach, California
回覆所有人
回覆作者
轉寄
0 則新訊息