Tuesday ROS Discussion Group 7:00pm Pacific Time
11 views
Skip to first unread message

camp .
Jan 11, 2022, 3:06:12 PM1/11/22
to HomeBrew Robotics Club
Jan 11, 2022 7:00pm Pacific Time
A weekly discussion of all things ROS. Beginner or expert if you have an interest in ROS, please join us.
Zoom: https://us06web.zoom.us/j/87058611464?pwd=b09pSTluVDdpbW9xeHRpdUMrUnlwdz09
Meeting ID: 870 5861 1464, Passcode: 403987
Thanks,
Meeting ID: 870 5861 1464, Passcode: 403987
Thanks,
Camp
camp .
Jan 11, 2022, 7:15:57 PM1/11/22
to HomeBrew Robotics Club
Tonight! - cp
--
You received this message because you are subscribed to the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/434823895.1551986.1641931548381%40mail.yahoo.com.
You received this message because you are subscribed to the Google Groups "HomeBrew Robotics Club" group.
To unsubscribe from this group and stop receiving emails from it, send an email to hbrobotics+...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/434823895.1551986.1641931548381%40mail.yahoo.com.

Mark Womack
Jan 12, 2022, 11:25:06 AM1/12/22
to hbrob...@googlegroups.com
Sorry I missed this. Recap?
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/1799676696.1637551.1641946550486%40mail.yahoo.com.
camp .
Jan 12, 2022, 2:25:27 PM1/12/22
to hbrob...@googlegroups.com
> Recap?
First off, I pointed out the "HBRC Example Robot" document: https://docs.google.com/document/d/1wxa2x0Tm9xONgTUZrIBZu4LOrlNEI9vaWj-uY3Ny3Wc/edit?usp=sharing
It was mentioned there were three elements: Virtual, Small (Bart), and Large (Homer).
We looked at the three basic shapes: Horizontal Rectangle, Circle, and Vertical Rectangle. I suggested that I was pursuing the Circular base for Homer.
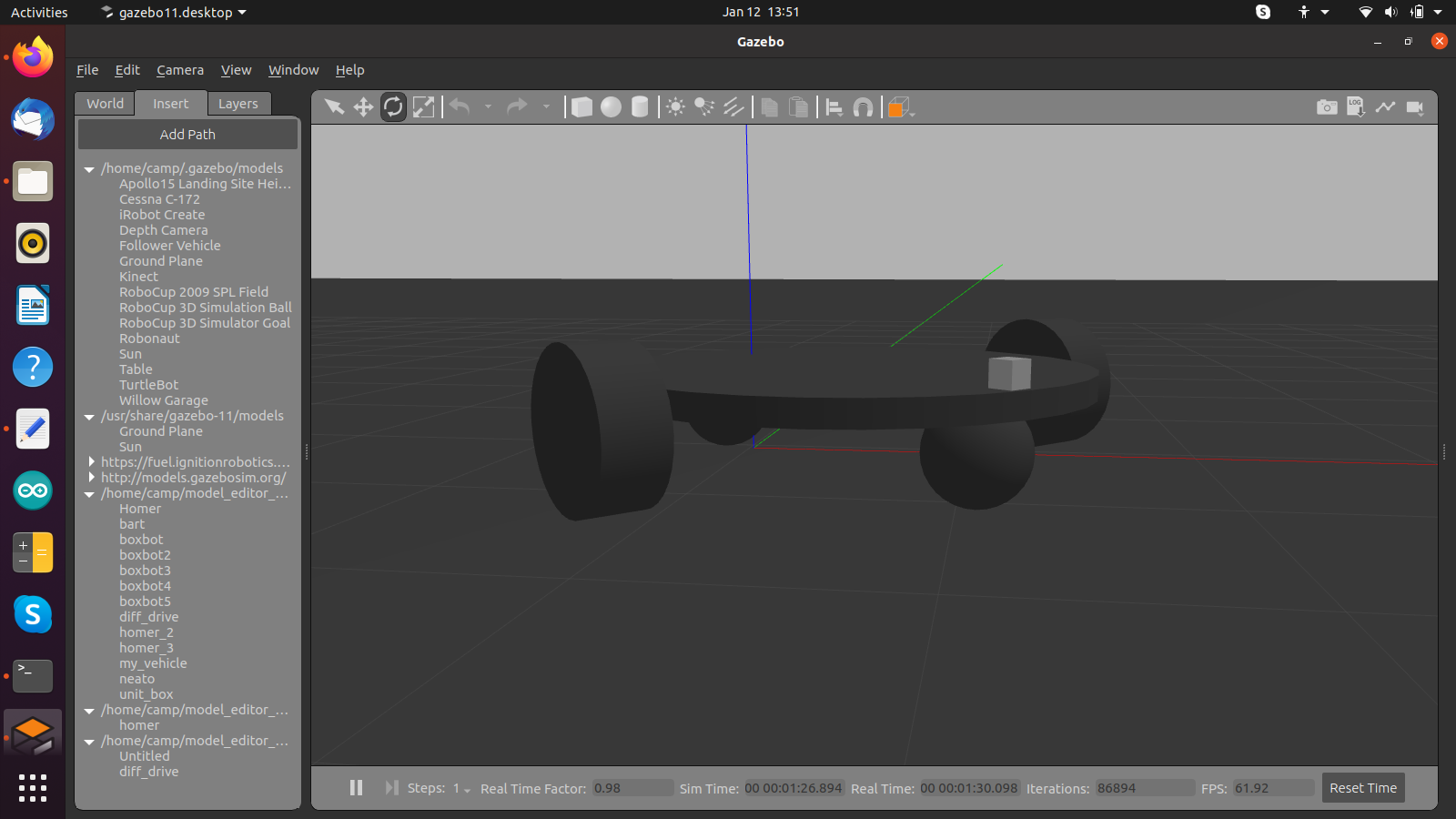
I demo'ed the "Follower" robot from the Model Editor tutorial: http://gazebosim.org/tutorials?cat=guided_b&tut=guided_b3
...and showed a circular-based model that I had created <attached> and we discussed how once a Gazebo model had been saved, it couldn't be deconstructed, and it seemed to save as a monolithic "xml" file. There was also some discussion as to the difference between urdf and sdf. We also talked about tools to create models, Model Builder, SketchUp, Fusion360, etc.
We went around the table, and different folks talked about what they were working on (8 participants). Callan from Southern California had been to a few meetings and is heavily into 3D printing. Bob Smith talked about micro-ROS and using it on the Pi Zero. Bob is heavily involved with FPGAs.
Chaz talked about moving this IMU to ROS2: https://www.amazon.com/gp/product/B01N03WKDV/ref=ppx_yo_dt_b_asin_title_o03_s00 Here is the ROS1 package: https://github.com/yowlings/wit_node
Mr. Mike, at this point, gave a preview of his Behavior Tree presentation scheduled for January 26: http://www.hbrobotics.org He showed a simulation featuring Ralph Gnauck's simbot https://github.com/gnaur/simbot where the robot would find the nearest wall and continue from there. He also demonstrated the Behavior Tree graphically using Groot.
- Camp
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/CAF-TXgvHOV3Py_HtKCJM7YjFMaY8AhhJmth-gF1P2psT3sCY4A%40mail.gmail.com.
Mark Womack
Jan 12, 2022, 3:05:21 PM1/12/22
to hbrob...@googlegroups.com
Thanks, Camp!
Yeah, everything in that Example Bot design doc is still very much in flux and up for discussion.
Did you have a reasoning for using the circular base for Homer instead of something like the vertical-rectangle base?
I'm also interested in microROS, but I'll start another thread on that.
-Mark
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/243970790.5451.1642015520519%40mail.yahoo.com.
camp .
Jan 12, 2022, 3:36:26 PM1/12/22
to hbrob...@googlegroups.com
> Did you have a reasoning for using the circular base for Homer instead of something like the vertical-rectangle base?
Circles are slipperier than straight edges when navigating, and I think the differential drive in the center will yield more accurate translations, especially regarding the angular velocity. I believe this is the best option against my arch-nemesis... thick carpet! ;- )
- Camp
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/CAF-TXgtzwsyvYV%2BEMrLExd6DpUFK5xArd7fLWFcavALz15TKAw%40mail.gmail.com.

{kind=link}
Michael Wimble
Jan 12, 2022, 4:27:56 PM1/12/22
to hbrob...@googlegroups.com
My arch enemy is thick headedness. I don’t think bigger wheels is going to help me
On Jan 12, 2022, at 12:36 PM, camp . <ca...@camppeavy.com> wrote:
To view this discussion on the web visit https://groups.google.com/d/msgid/hbrobotics/935676651.41489.1642019779530%40mail.yahoo.com.
Reply all
Reply to author
Forward
0 new messages