Re: [GTSAM] a problem with fixedlag marginalization

Brice Rebsamen
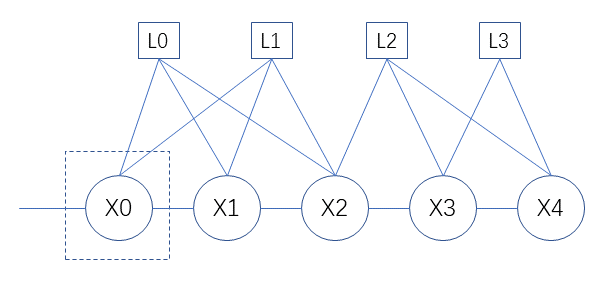
Hi, there.I met a problem using IncrementalFixedLagSmoother, the following is a sketch of the factor graph:The marginalization in IncrementalFixedLagSmoother has been done in the "update()" step, when it comes to the "calculateEstimate()", it throw an error :"Requested variable 'x0' is not in this VectorValues."I have checked all factors in the IncrementalFixedLagSmoother after the marginalization, "x0" has been removed from the variables, and no factor contains "x0" at all. That makes me confused too much.Any help!--
You received this message because you are subscribed to the Google Groups "gtsam users" group.
To unsubscribe from this group and stop receiving emails from it, send an email to gtsam-users...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/gtsam-users/d588b2b4-6c54-4817-b1a2-657e60847a8an%40googlegroups.com.

navid km

Joel Truher
- if a short lag is used, such that the number of active timestamps is small, the error disappears. The specific number of allowed timestamps seems to vary; sometimes it's 5, sometimes 10
- for medium levels of lag, i can catch the IndexError in update() and calculateEstimate() and proceed, and all is well for awhile (maybe ten iterations)
- for longer lag, catching the IndexError results in a state that produces ValueErrors in update(), and then IndexErrors in every call to marginalCovariance(), like it forgets every key, and doesn't recover. in this state, it also stops pruning timestamps, so the timestamp map grows without bound.
Joel Truher

Dellaert, Frank
Hi Joel
You are at this point in time probably the best person to create a PR with the smallest possible unit tests that reproduces the issue, if in fact it is a bug in GTSAM and not in your code. Issue 1101 was resolved I think, and that was part user code/part GTSAM. I found that often even making the unit tests is informative. Happy to review a PR with a unit test and maybe even a possible fix? 😊
Frank
From:
gtsam...@googlegroups.com <gtsam...@googlegroups.com> on behalf of Joel Truher <joel....@gmail.com>
Date: Thursday, August 15, 2024 at 12:14 PM
To: gtsam users <gtsam...@googlegroups.com>
Subject: Re: [GTSAM] a problem with fixedlag marginalization
|
You don't often get email from joel....@gmail.com. Learn why this is important |
oh, another clue: initially i used a single set of "landmark" variables (e.g. "L(1)" and "L(2)", used them in every bearing-range factor, and updated their timestamps with each iteration.
it's ok to treat the landmarks as fixed, so i changed this so that every iteration creates a new set of "landmarks," and old "landmarks" are pruned just like old "robot" states, and viola! the issues described above disappear!
i imagine that the problem has something to do with having many bearing-range factors linked to the same landmark variables.
On Thursday, August 15, 2024 at 11:12:02 AM UTC-7 Joel Truher wrote:
I experience this same behavior, messages like "IndexError: Requested variable 'x41' is not in this VectorValues." from IncrementalFixedLagSmoother.update(), with a similar setup.
i'm using python, with a toy problem, a few fixed landmarks and a single moving state, using odometry and bearing/range factors. there's an animated plot showing the covariance distributions. the whole point is to teach high school kids the concepts, in preparation for the 2025 robotics season. (messy code here if you're curious: https://github.com/truher/all24/blob/main/studies/factor_graph/factor_graph2.py)
Some observations, in case anyone is interested:
· if a short lag is used, such that the number of active timestamps is small, the error disappears. The specific number of allowed timestamps seems to vary; sometimes it's 5, sometimes 10
· for medium levels of lag, i can catch the IndexError in update() and calculateEstimate() and proceed, and all is well for awhile (maybe ten iterations)
· for longer lag, catching the IndexError results in a state that produces ValueErrors in update(), and then IndexErrors in every call to marginalCovariance(), like it forgets every key, and doesn't recover. in this state, it also stops pruning timestamps, so the timestamp map grows without bound.
perhaps this is somehow related to the marginalization accounting issue described in https://github.com/borglab/gtsam/issues/1101?
On Wednesday, September 15, 2021 at 2:00:38 AM UTC-7 n.mah...@gmail.com wrote:
I get the exact error when using ISAM2 IncrementalFixedLagSmoother marginalization, in update() step. My graph is very similar to the above picture, and I use BearingRangeFactor for the landmarks.
Do you came into any conclusion or any solution found?
Best
Navid
On Monday, 14 September 2020 at 18:00:03 UTC+2 brice.r...@gmail.com wrote:
Hello
This should work, so the first that comes to mind is that you made a mistake somewhere. Unfortunately it's hard to provide more help than the following advice: go back to studying the example for the IncrementalFixedLagSmoother and double check your code (a strategy is to trim your code to reduce the complexity as much as possible so that it's easier to grok what's going on). Good luck.
On Sun, Sep 13, 2020 at 8:47 AM huanhexiao <huanh...@gmail.com> wrote:
Hi, there.
I met a problem using IncrementalFixedLagSmoother, the following is a sketch of the factor graph:
The marginalization in IncrementalFixedLagSmoother has been done in the "update()" step, when it comes to the "calculateEstimate()", it throw an error :
"Requested variable 'x0' is not in this VectorValues."
I have checked all factors in the IncrementalFixedLagSmoother after the marginalization, "x0" has been removed from the variables, and no factor contains "x0" at all. That makes me confused too much.
Any help!
--
You received this message because you are subscribed to the Google Groups "gtsam users" group.
To unsubscribe from this group and stop receiving emails from it, send an email to gtsam-users...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/gtsam-users/d588b2b4-6c54-4817-b1a2-657e60847a8an%40googlegroups.com.
--
You received this message because you are subscribed to the Google Groups "gtsam users" group.
To unsubscribe from this group and stop receiving emails from it, send an email to
gtsam-users...@googlegroups.com.
To view this discussion on the web visit https://groups.google.com/d/msgid/gtsam-users/a522c1f3-89aa-43b7-a0f3-5d6bbde73762n%40googlegroups.com.